# 基本概念
本主题提供了无人机和使用 PX4 的基本介绍(主要面向新手用户,但对有经验的用户也是一个很好的介绍)。
如果你已经熟悉了基本概念,你可以转到 基本组装 以了解如何连接特定的自驾仪硬件。 要加载固件并使用 QGC 地面站 设置飞行器,请查看 基本配置。
# 无人机是什么?
无人机是无人驾驶的“机器人”设备,可以远程或自动控制。
无人机可被用于 消费级、工业级、政府、军工应用 (opens new window)。 这包括(非详尽):航空摄影/录像,载货,竞速,搜索和测绘等。
提示
不同类型的无人机可用于空中、地面、海上和水下。 这些(更正式地)被称为无人驾驶飞行器(UAV),无人驾驶飞行器系统(UAS),无人驾驶地面车辆(UGV),无人驾驶水面船只(USV),无人驾驶水下潜航器(UUV)。
无人机的“大脑”被称为自动驾驶仪。 它由 载具控制器(“飞行控制器”)硬件和运行其上的 飞行栈 软件组成。
# PX4 自动驾驶仪
PX4 (opens new window) is powerful open source autopilot flight stack.
PX4 的一些主要功能包括:
- 可控制许多不同的设备机架/类型,包括:飞机(多旋翼,固定翼和垂直起降),地面车辆和水下潜航器。
- 适用于设备控制器,传感器和其他外围设备的硬件选择。
- 灵活而强大的飞行模式和安全功能。
PX4 是一个大型无人机平台的核心部分,它们都包括 QGC 地面站,Pixhawk 硬件 (opens new window),还有MAVSDK (opens new window) 用于与机载计算机集成,相机还有其他使用 MAVLink 协议的硬件。 PX4 由 Dronecode 项目 (opens new window) 支持。
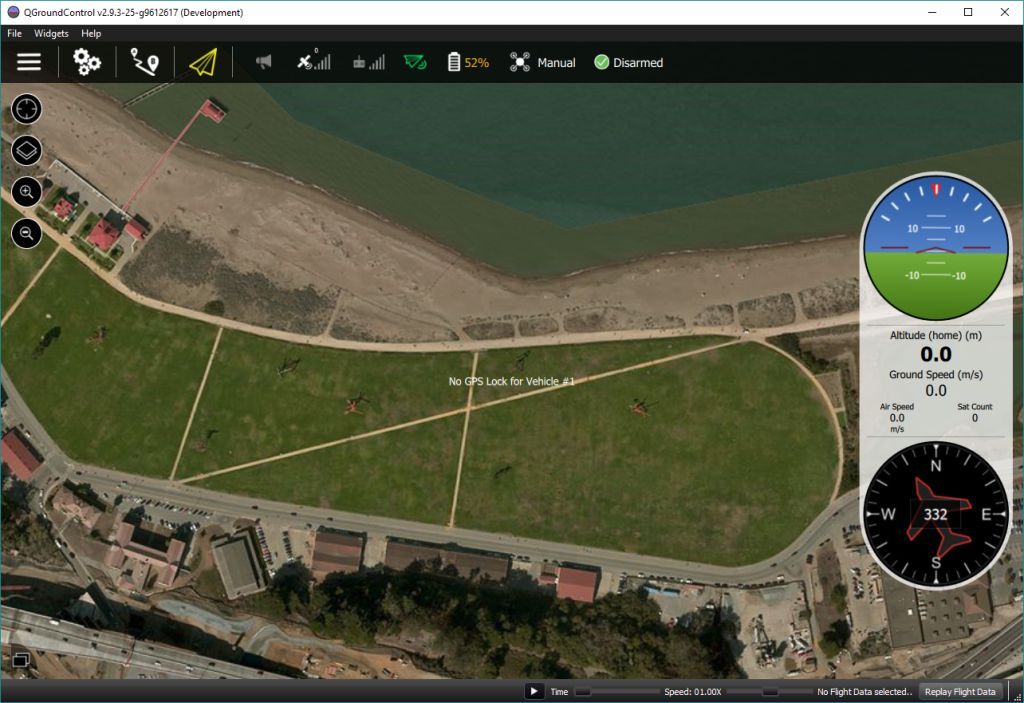
# QGroundControl
Dronecode 地面控制站称为 QGC 地面站 (opens new window)。 您可以使用QGroundControl 将PX4 加载(烧写)到飞行器控制硬件上,您可以设置飞行器,更改不同参数,获取实时飞行信息以及创建和执行完全自主的任务。
QGroundControl 可以在 Windows,Android,MacOS 或 Linux 上运行。 从 这里 (opens new window) 下载并安装。
# 机体/飞行控制板
PX4最初设计为在 Pixhawk 系列 飞控上运行,但现在可以在 Linux 计算机和其他硬件上运行。 选择飞行控制板时,您应当考虑飞行器的物理尺寸限制,想要执行的活动,还有必不可少的成本。
更多信息,请参阅:飞行控制器选择。
# 传感器
PX4 使用传感器来确定飞行器状态(稳定和启用自动控制所需)。 系统*最低要求 *陀螺仪,加速度计,磁力计(罗盘)和气压计。 需要 GPS 或其他定位系统来启用所有自动模式和一些辅助模式。 固定翼和 VTOL 飞行器还应包括空速传感器(强烈推荐)。
有关详细信息,请参阅︰
# 输出:电机,舵机,执行器
PX4使用输出来控制:电机速度(例如通过ESC),飞行平面如副翼和襟翼,相机触发器,降落伞,抓手,和许多其他类型的有效载荷。
例如,下面的图像显示 Pixhawk 4 和 Pixhawk 4 mini 的 PWM 输出端口。
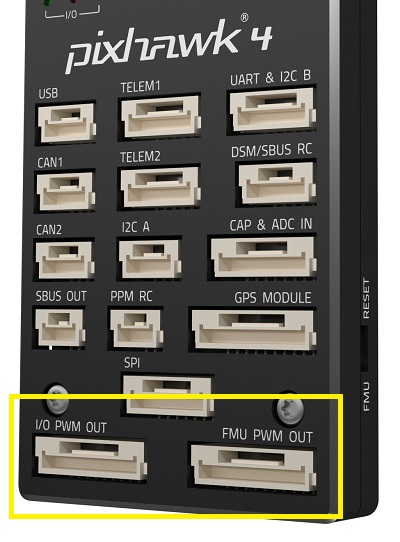

输出分为 MAIN 和 AUX,并单独编号(MAINn 和 AUXn, n 通常是从1到6或8)。
提示
每个输出的特定目的是在每个机身的基础上硬编码的。 所有机架的输出映射都在 机架参考 中。
注意
飞行控制器可能只有MAIN 输出, (比如 Pixhawk 4 Mini),也可能只有6个MAIN 或 AUX输出。 确保您选择的控制器有足够的端口/输出接口适应您的机身。
通常情况下, MAIN 端口用于核心飞行控制。 AUX 用于非关键执行器/载荷(但是,比如VTOL机型,如果 MAIN没有足够的接口, AUX也可能用来做飞行控制)。 例如, 通用四旋翼 用 MAIN 输出的 1-4 来控制电机,其余的 MAIN 和AUX 输出可以用来做 RC 透传。
飞行控制器 上的实际输出端口/总线取决于硬件和 PX4 配置。 通常 端口像如上所示的被映射为PWM输出,丝印一般为 MAIN OUT and AUX OUT。
它们也可能被标记为 FMU PWM OUT 或 IO PWM Out (或类似)。 Pixhawk 控制器又一个 "主" FMU 和可能存在的 独立的 IO 板。 如果有IO 板, AUX 端口直接连接到 FMU 和 MIAN 端口连接到IO板。 否则, MAIN 端口已连接到FMU,没有 AUX 端口。 FMU输出端口可以使用 D-shot 或 One-shot 协议 (当然也有 PWM), 它们的延迟低很多。 这对于需要更好性能的穿越机和其他机体来说是有用的。
输出端口也可以映射到 UAVCAN节点 (例如,UAVCAN 电机控制器)。 在这种情况下使用(相同的)输出到节点的机架映射。
备注:
MAIN和AUX中仅有6-8个输出,因为大多数飞行控制器只有这么多的 PWM/Dshot/Oneshot 输出。 理论上来说,如果总线支持,可以有更多的输出(比如UAVCAN就不限于这几个节点)。
# 电调 & 电机
许多 PX4 无人机使用无刷电机,其由飞行控制器通过电子调速器(ESC)驱动(ESC将来自飞行控制器的信号转换为合适的功率水平,传递给电机)。
有关 PX4 支持的电调和电机的信息,请参阅:
- 电调 & 电机
- 电调(ESC)校准
- 电调固件和协议概述 (opens new window)(oscarliang.com)
# 电池/电源
PX4 无人机通常由锂聚合物(LiPo)电池供电。 电池通常使用*电源模块 或电源管理板 *连接到系统,它为飞行控制器和 ESC(用于电动机)提供单独的动力。
有关电池和电池配置的信息,请参见电池配置和基本组件(例如 Pixhawk 4 接线快速入门>电源)。
# 无线电控制(遥控)
遥控(RC)系统用于 手动 控制机体。 它由一个遥控装置组成,使用发射机来与飞行器上的接收机通信。 一些 RC 系统还可以接自动驾驶仪传回的收遥测信息。
PX4 在自主飞行模式中不需要遥控系统。

遥控系统选择 说明如何选择遥控系统。 其他相关主题包括:
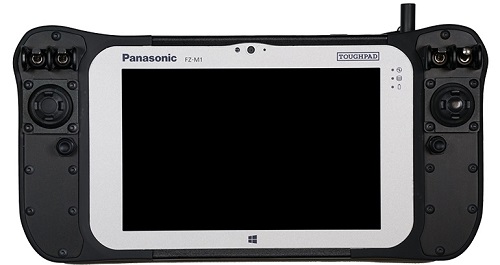
# 地面站游戏手柄控制器
通过QGroundControl连接的游戏手柄也可以用来手动控制PX4 (QGC将操纵杆的运动转换为通过遥测链路发送的MAVLink消息)。 这种方法被一些集成了地面站的地面端遥控器所使用的,如 Auterion Skynav (opens new window) or UAVComponents MicroNav (opens new window)。 游戏手柄也经常被用于无人机的飞行仿真中。
# 安全开关
机体通常必须有一个 安全开关,然后才能使用 解锁(解锁后,电机会供电,螺旋桨开始旋转)。 通常,安全开关被整合到GPS设备中,但也可能是一个单独的物理组件。
注意
解锁后的机体是有潜在危险的。 安全开关是防止意外解锁发生的一个附加机制。
# 数传电台
数传电台 可以在诸如 QGC 地面站 与运行 PX4 的机体之间提供无线 MAVLink 连接。 这使得飞机飞行中调试参数、实时检查遥测信息、更改任务等等成为了可能。
# 机载计算机
PX4 可以通过串行接线或 WiFi 由独立的机载伴飞计算机进行控制。 机载计算机通常使用 MAVLink API(如 MAVSDK 或 MAVROS)进行通信。
有关主题包括:
- Offboard 模式 - 用于从地面站或机载计算机对 PX4 进行 Offboard 控制的飞行模式。
- Robotics APIs
# SD卡(可移除储存器)
PX4 使用 SD 储存卡存储 飞行日志,而且还需要内存卡才能使用 UAVCAN 外围设备,运行 飞行任务。
默认情况下,如果没有 SD 卡,PX4 将在启动时播放 格式化失败(2-声短响) 两次(且上述需要储存卡的功能都不可用)。
提示
Pixhawk 飞控板支持的最大 SD 卡大小为 32 GB 。 强烈推荐使用SanDisk Extreme U3 32GB 。
SD 卡在某些情况下也是可选的。 不包含 SD 卡槽的飞行控制器可以:
- 使用参数 CBRK_BUZZER 禁用通知蜂鸣器。
- 推流日志 到另一个组件(机载计算机)。
- 在 RAM/FLASH 中储存任务。
# 解锁和加锁
机体是有可活动的部件的,其中一些在通电后会有潜在的危险性(特别是电机和螺旋桨)!
为了减少事故概率:
- 当不在使用时, PX4 机体是 加锁状态的(未供电的),必须在起飞前进行 解锁。
- A vehicle will automatically disarm if a pilot does not take off quickly enough, and after landing (the disarm time is configurable).
- Some vehicles also have a safety switch that must be disengaged before arming can succeed (often this switch is part of the GPS).
- Arming is prevented if the vehicle is not in a "healthy" state.
- Arming is prevented if a VTOL vehicle is in fixed-wing mode (by default).
解锁默认情况下(美国手发射机)可以通过保持遥控油门+ YAW 摇杆到右下角一秒钟来解锁,要想加锁,则保持摇杆在左下角。 还可以使用遥控上的按钮来配置 PX4 解锁(也可以从地面站发送解锁命令)。
还有更细节的解锁和加锁的配置的详细解读可以在这里找到:预解锁,解锁,加锁配置。
# 飞行模式
飞行模式为用户(飞手)提供不同类型/级别的飞行器自动化和自动驾驶辅助。 自主模式完全由自驾仪控制,无需飞手/遥控输入。 例如,它们可用于自动执行诸如起飞,返回 Home 点和着陆等常见任务。 其他自主模式执行预编程任务,跟随 GPS 信标,或接受来自机载计算机或地面站的命令。
手动模式 由用户(通过遥控控制杆/手柄)在自驾仪的协助下实现控制。 不同的手动模式可以实现不同的飞行特性 - 例如,某些模式可以实现特技动作,而其他模式则无法翻转并且会抗风以保持位置/航向。
提示
并非所有的飞行模式都适用于所有飞行器,并且某些模式只能在满足特定条件时使用(例如,许多模式需要全局位置估计)。
可用飞行模式的概述可在 这里找到。 飞行模式配置 中提供了有关如何设置遥控开关以打开不同飞行模式的说明。
# 安全设置(故障保护)
PX4 具有可配置的故障安全系统,可在出现问题时保护和挽回您的飞行器! 这些允许您指定可以安全飞行的区域和条件,以及触发故障保护时将执行的操作(例如,着陆、保持位置或返回指定点)。
注解
您只能为 第一个 故障保护事件指定操作。 一旦发生故障保护,系统将执行特殊处理代码,以便后续故障保护触发器由单独的系统层级和飞行器特定代码管理。
主要的故障保护事件如下:
- 低电量
- 遥控(RC) 信号丢失
- 位置信息丢失(全局位置估计质量太低)
- 机载计算机控制指令丢失(如与机载计算机失去连接)
- 数传信号丢失(如失去与 GCS 的遥测连接)
- 超出地理围栏 (限制飞行器在虚拟圆柱体内飞行)。
- 任务故障保护(防止先前的任务在新的起飞地点运行)。
- 交通避障(由来自如 ADS-B 转发器的数据触发)。
有关详细信息,请参阅:安全(基本配置)。
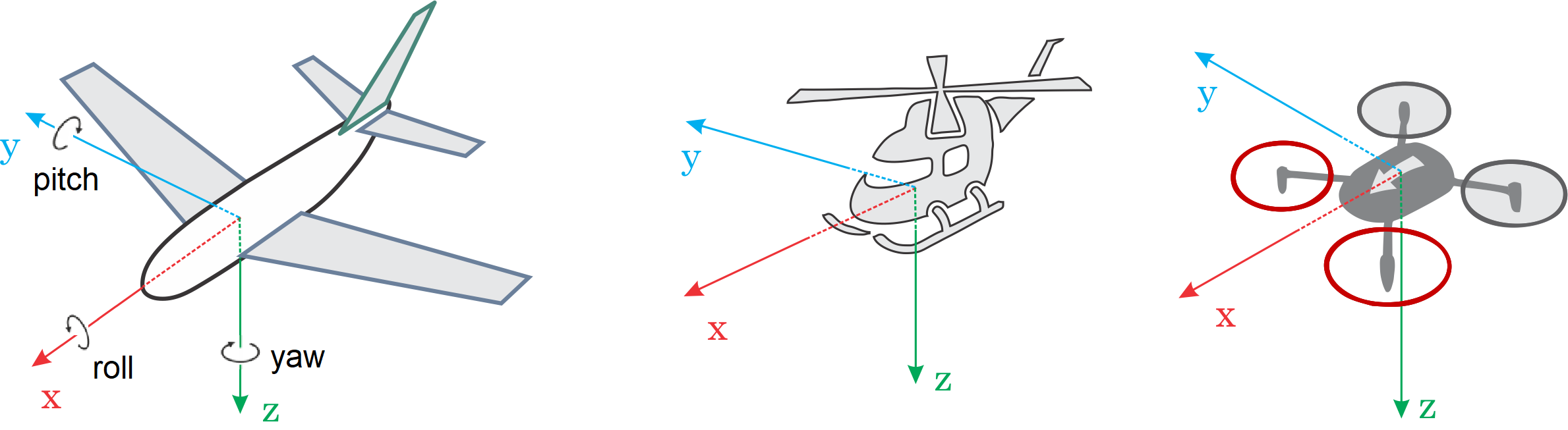
# 航向和运动方向
所有车辆,船只和飞机都具有航向(机头朝向)或基于其前进运动的方向。
注解
对于 VTOL Tailsitter 机头朝向是与多旋翼配置相关的(比如无人机在起飞,悬停,降落时的姿态)。
知道机体朝向,以使自驾仪与设备运动矢量对齐是重要的。 即使多旋翼从各个方向都对称,但其也有朝向! 通常制造商使用彩色螺旋桨或带颜色的机臂来表示朝向。
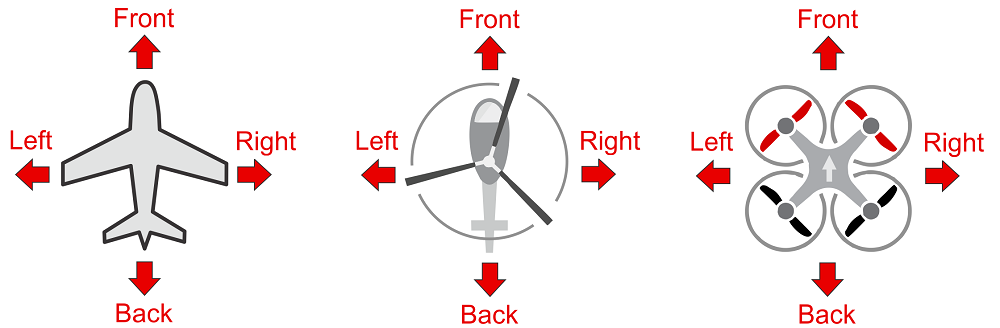
在我们的插图中,我们将使用红色的前螺旋桨来显示多旋翼的航向。
您可以在 飞行控制器方向 中深入了解朝向。