# Traxxas Stampede VXL
이 차량은 Pixhawk가 바퀴가 달린 플랫폼에 어떻게 사용될 수 있는지 이해하기 위해 선택되었습니다. 우리는 Traxxas 차량이 매우 인기 있고 RC 커뮤니티에서 매우 강력한 브랜드이기 때문에 사용하기로 선택하였습니다. 이 아이디어는 자동 조종 장치로 바퀴 달린 UGV를 쉽게 제어 할 수있는 플랫폼을 개발하는 것이었습니다.

# 부품 목록
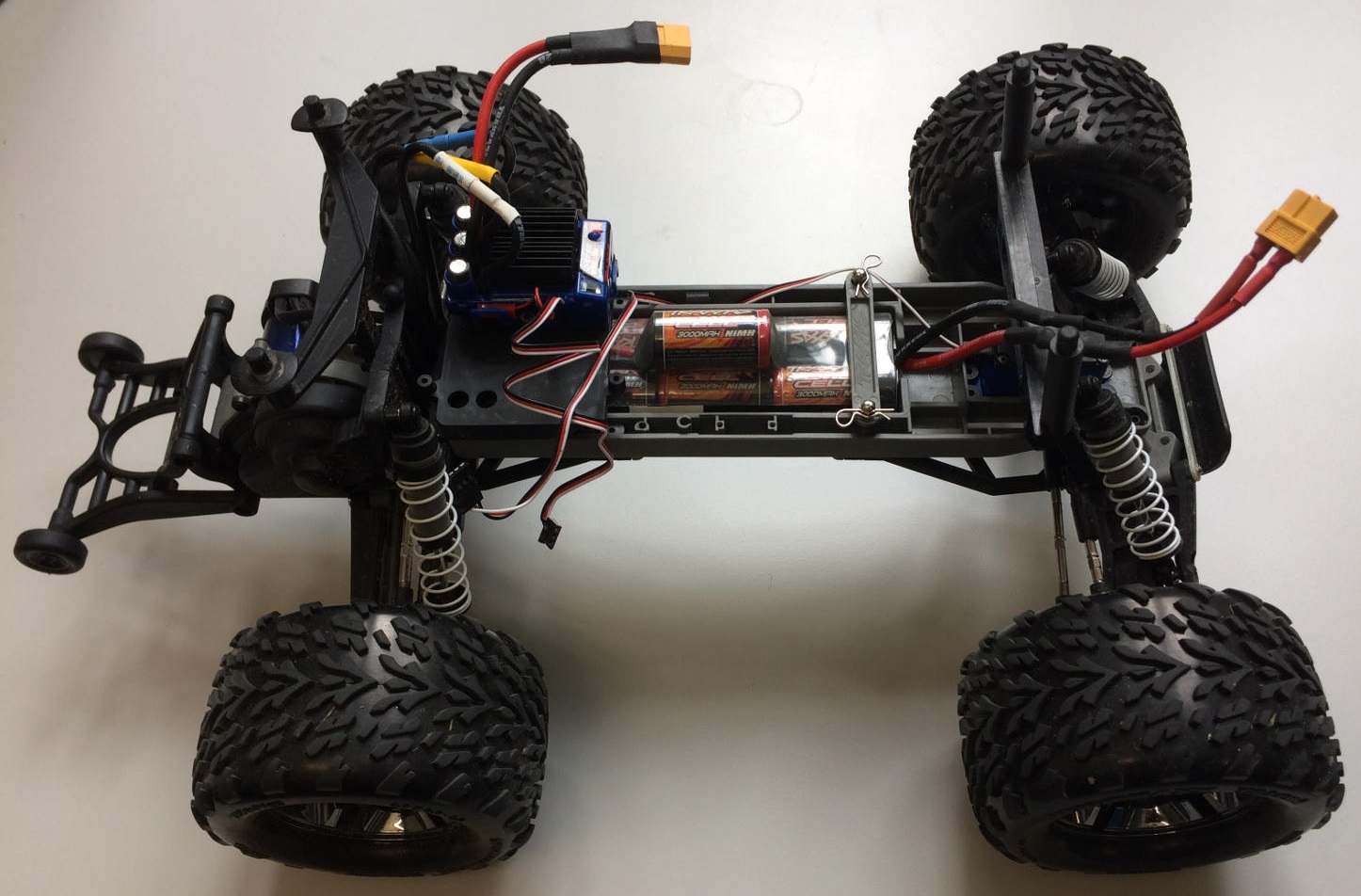
- Traxxas Stampede (opens new window)의 부품들은 상단 플라스틱 덮개를 제외하고 모두 사용됩니다.
- Pixhawk Mini (단종)
- 3DR 10S 전원 모듈
- [3DR 433MHz 텔레메트리 모듈 (EU)
- Spektrum Dxe 컨트롤러 (opens new window) 또는 기타 PX4 호환 리모컨
- Spektrum 쿼드 레이스 직렬 수신기 w/Diversity (opens new window)
- PX4Flow
# 조립
부품들을 나무판위 부착하여 조립합니다. Pixhawk 및 Flow 모듈의 경우에는 좋은 진동 방진재를 사용하는 것이 좋습니다.
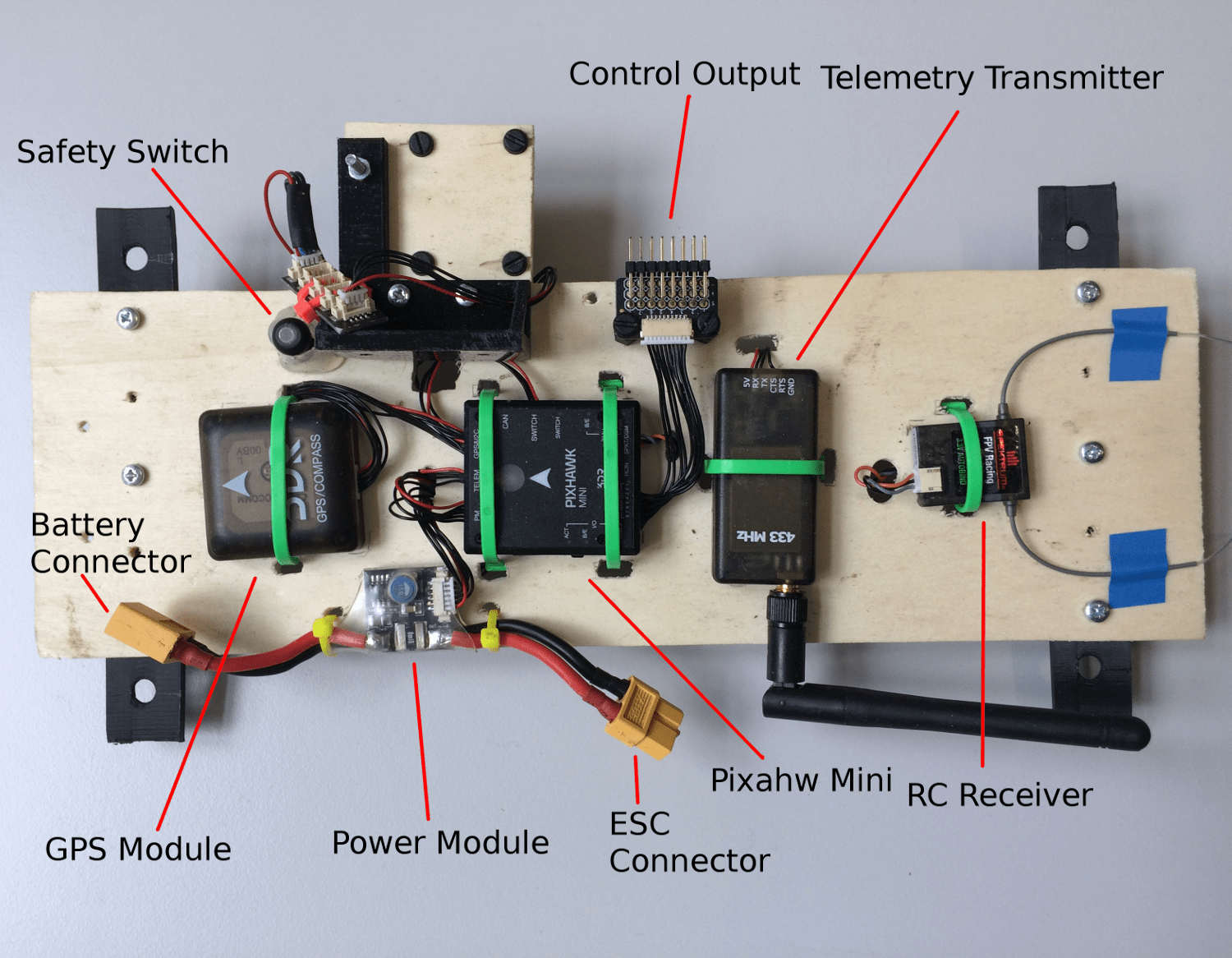
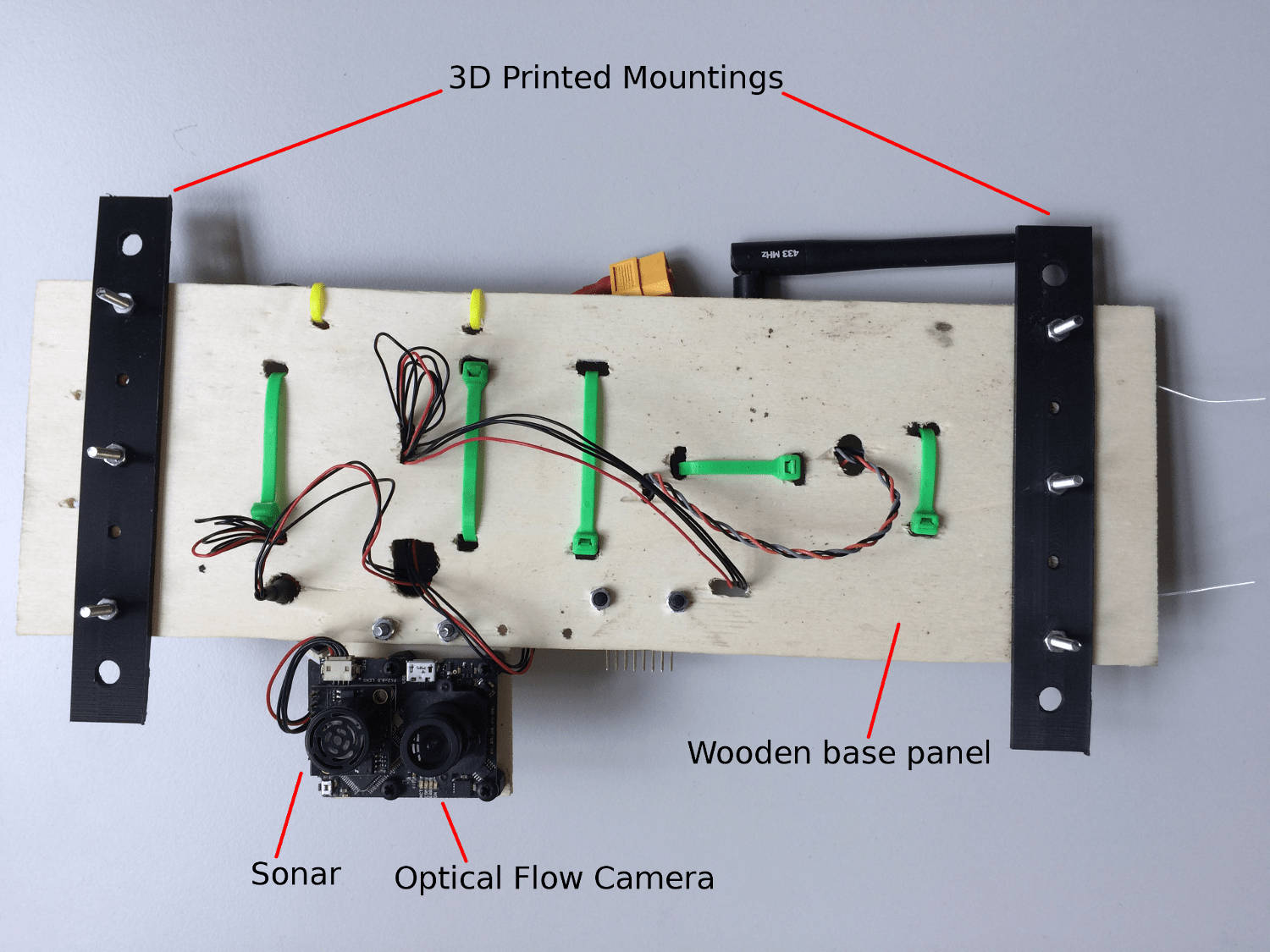

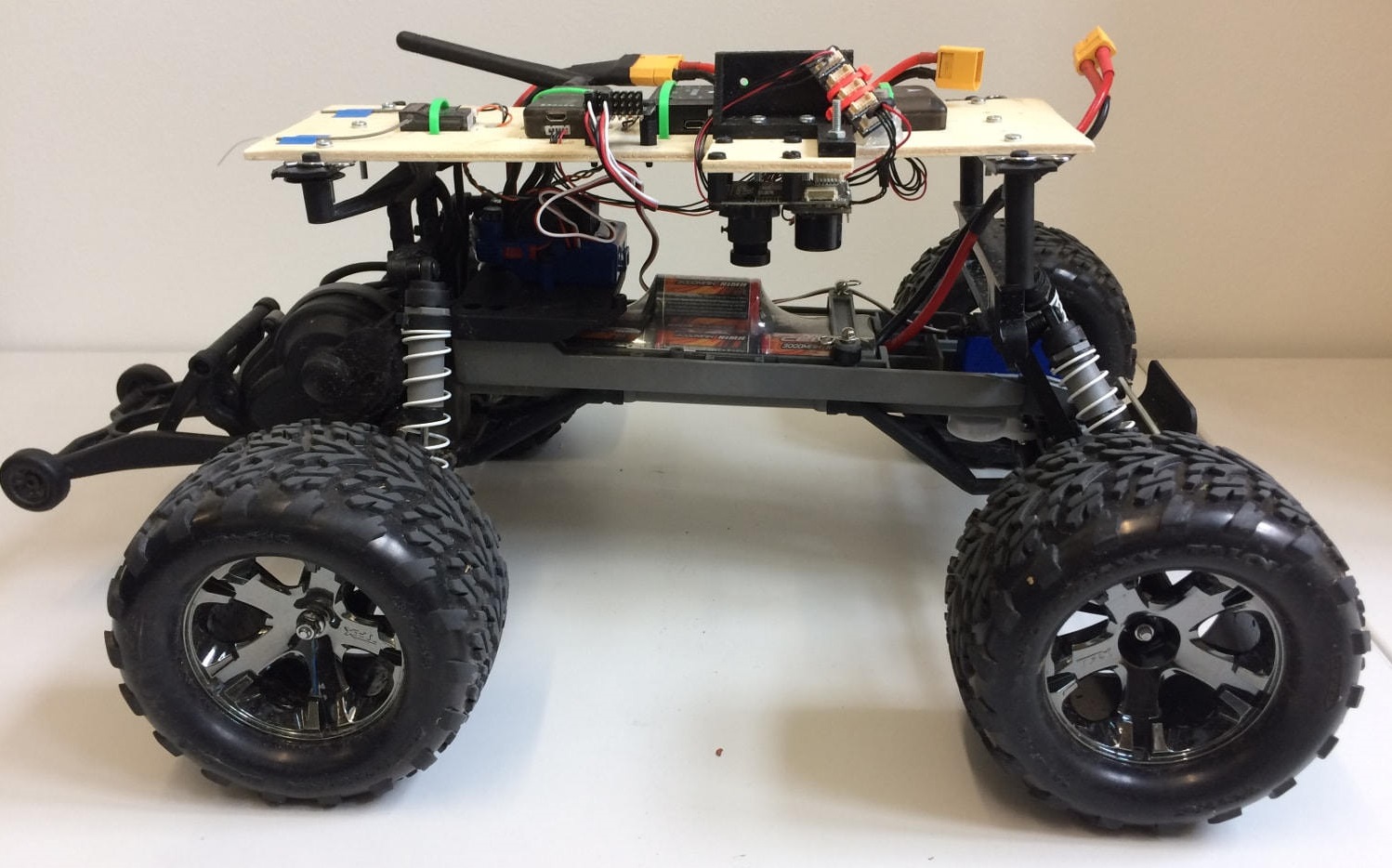
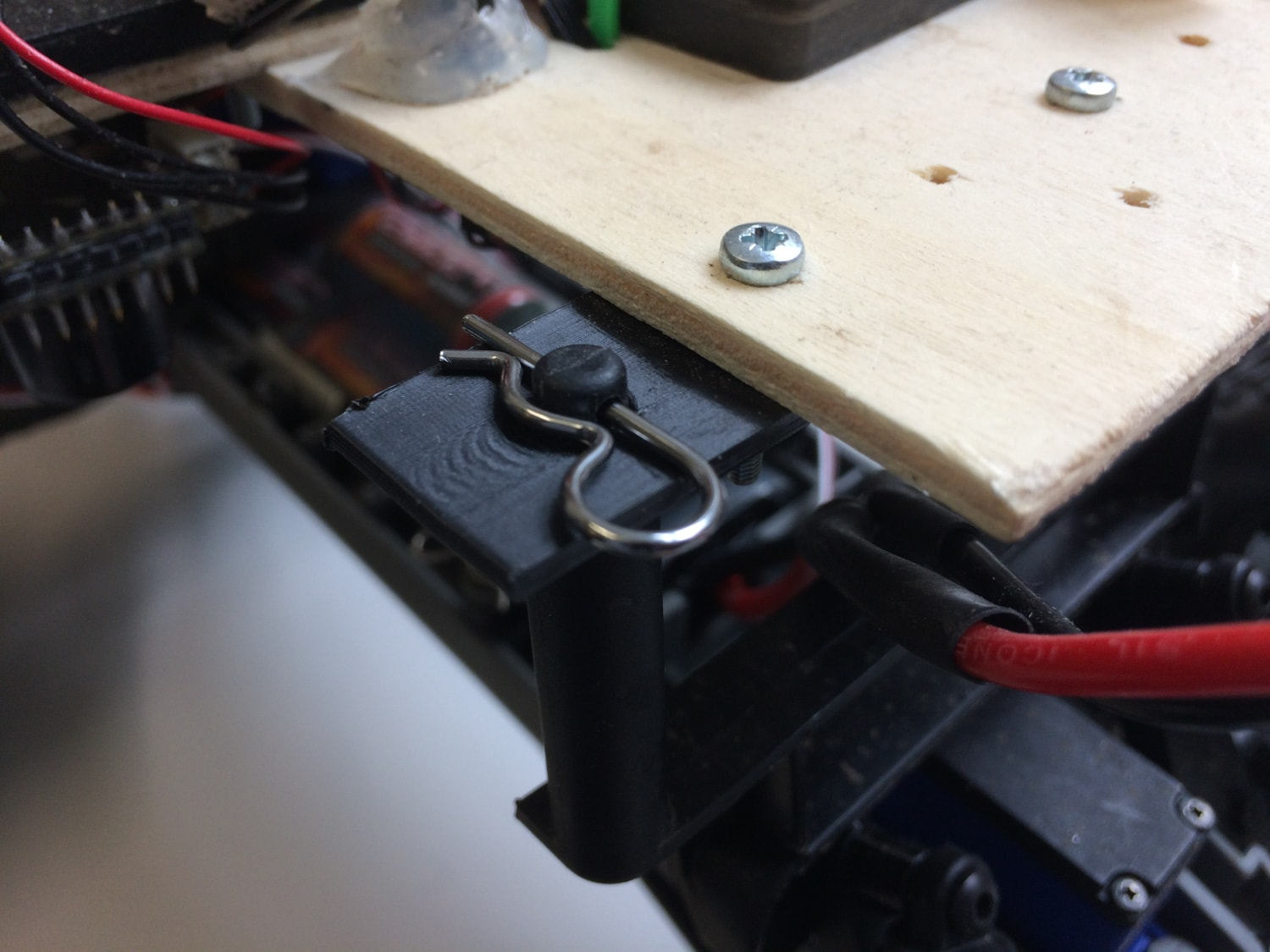
로버와 함께 제공된 클립을 사용하여 상부 플레이트를 부착하였습니다. 두 개의 지지대가 3D 인쇄되었습니다. CAD 파일은 여기 (opens new window)에서 제공됩니다.
WARNING
훈련 모드에서 ESC를 설정하는 것을 적극 권장하며 (Traxxas Stampede 매뉴얼 참조) 전력을 50 %로 줄입니다.
# 출력 연결
| PWM 출력 | 액추에이터 |
|---|---|
| MAIN2 | 조향 서보 |
| MAIN4 | Throttle (ESC input) |
Note
여기에있는 Airframe 참조에 설명되어 있습니다.
# 설정
로버는 다른 기체와 같은 방법으로 QGroundControl을 사용하여 설정합니다.
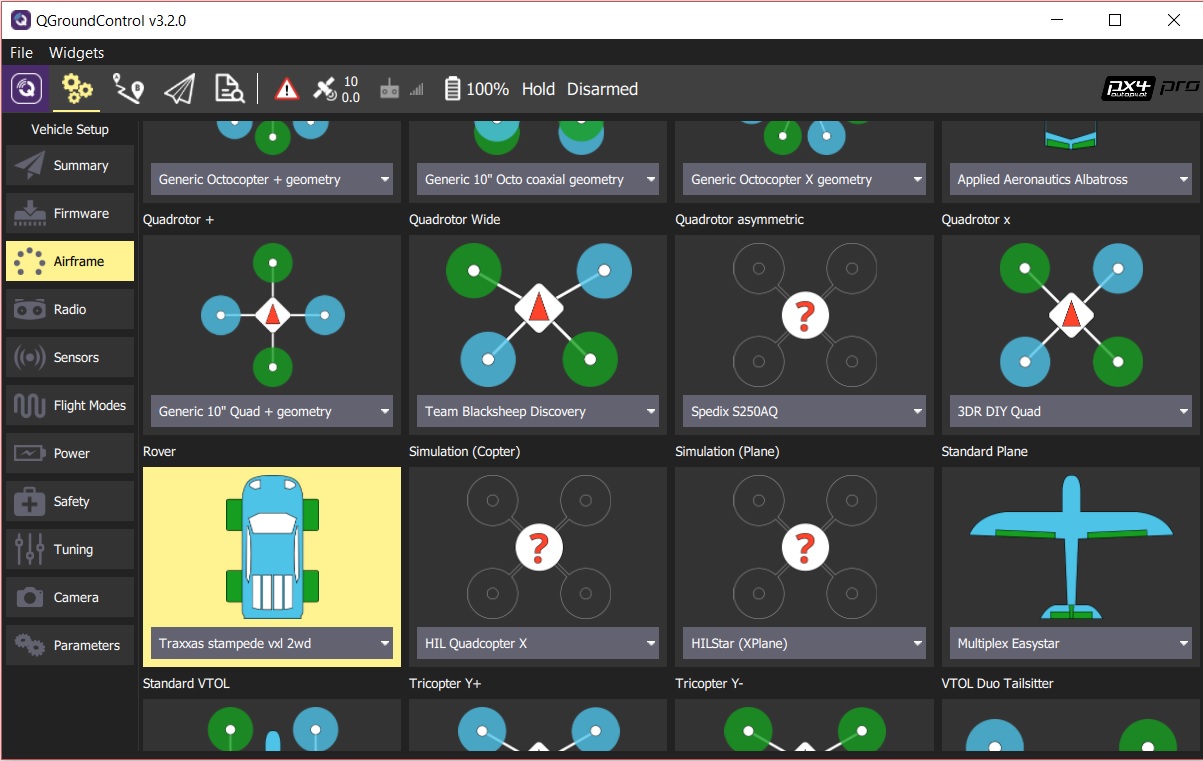
중요한 로버 설정은 올바른 프레임을 설정하는 것입니다.
- QGroundControl의 기본 설정 섹션으로 전환합니다.
- Airframe 탭을 선택합니다.
- 목록을 아래로 스크롤하여 Rover 아이콘을 찾습니다.
- 드롭다운 목록에서 Traxxas stampede vxl 2wd를 선택합니다.
# 사용법
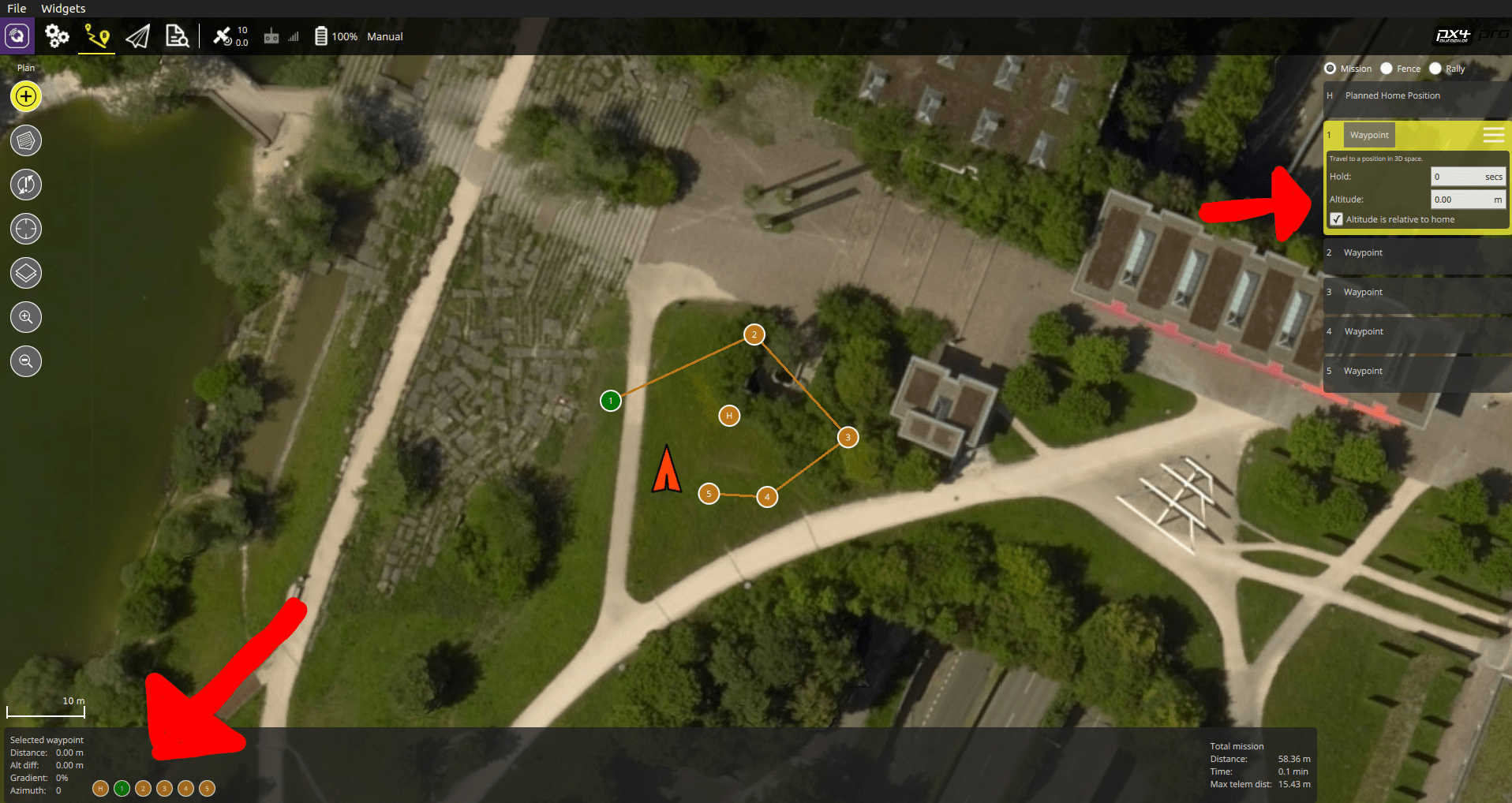
현재 PX4는 RC 리모컨이 연결된 경우 MISSION 과 MANUAL 모드만을 지원합니다. 미션 모드를 사용하려면 먼저 QGC로 차량에 새 미션을 업로드 하세요. 그런 다음 MISSION을 먼저 선택한 다음에 시동을 거십시오.
WARNING
일반 웨이 포인트로 만 구성된 미션을 수행하는 것이 매우 중요하며 (예 : 이륙 웨이포인트 없음 등) 올바른 실행을 위해 모든 웨이 포인트의 높이를 0으로 설정하여야 합니다. 그렇게 하지 않으면, 로버가 웨이 포인트 주변을 계속 회전하게 됩니다.
올바른 임무 설정은 다음과 같습니다.