# 센서
PX4 시스템은 안정화나 자율제어를 위하여 센서를 사용하여 기체의 상태를 파악합니다. 기체 상태에는 위치, 고도, 방향, 속도, 대기 속도, 방향, 회전 속도 및 배터리 잔량 등이 있습니다.
자이로스코프, 가속도 센서, 지자기 센서와 기압 센서는 시스템 구동을 위한 최소 요구 사항입니다. 자동 모드와 기타 모드에는 GPS나 이와 유사한 위치 확인 시스템이 요구됩니다. 고정익과 수직이착륙기에는 대기속도 센서가 필요합니다.
Pixhawk 시리즈 비행 콘트롤러에 최소한의 센서들이 내장되어 있습니다. 필요한 센서들을 콘트롤러에 추가할 수 있습니다.
아래에서 주요 센서들에 대하여 설명합니다. 마지막에는, 센서 배선 방법에 관한 자료들을 설명합니다.
# GPS와 나침반
PX4는 다양한 GNSS(Global Navigation Satellite System) 수신기와 나침반(자기계)을 지원합니다. PX4는 센티미터 정밀도를 가진 GPS 시스템인 실시간 운동학(RTK) GPS 수신기를 지원합니다.
Note
픽스호크 시리즈 콘트롤러에는 내부 나침반이 포함되어 있습니다. Pixhawk를 배터리나 전선에서 가능하면 멀리 장착하여 전자기 간섭을 최소화하는 것이 좋습니다. 소형 운송체에서는 대부분 외부 나침반이 필수 요구사항입니다. :::
나침반이나 GPS 수신기는 모터나 ESC 전원에서 가능한 멀리 장착하여 사용하는 것이 좋습니다. 일반적으로 받침대나 고정 날개에 설치하는 것이 좋습니다.
GPS와 나침반의 일반적인 옵션은 GPS 및 나침반을 참고하십시오.

# 대기속도 센서
고정익과 VTOL에는 대기속도센서를 사용이 적극 권장됩니다.
자동조종장치에는 실속을 감지하는 다른 수단이 없으므로, 비행 속도 측정은는 매우 중요합니다. 고정익의 양력을 발생시키는 것은 대지속도가 아니라 대기속도입니다.
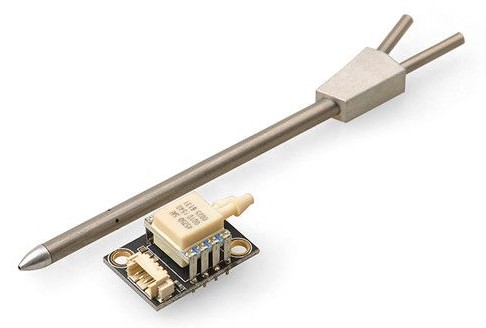
더 자세한 정보와 권장 하드웨어는 대기속도 센서를 참고하십시오.
# 타코미터
타코미터(회전 카운터 센서 (opens new window))는 자동조종장치의 실속 또는 다른 로터 고장을 감지할 수 있기 때문에 로터 윙 프레임에서 적극 권장됩니다. 로터 윙 비행의 경우 양력을 발생시키는 것은 대지속도나 지면 속도가 아닌 블레이드의 회전입니다.

더 자세한 정보와 권장되는 하드웨어는 센서 > 타코미터편을 참고하십시오.
# 거리 센서
정확한 착지, 장애물 회피와 등고 비행 등을 위하여 거리 센서가 필요합니다.
여러가지 기술을 사용하여 다양한 범위와 기능을 지원하는 저렴한 거리 센서를 PX4에서 지원합니다. 더 자세한 정보는 거리 센서를 참고하십시오.

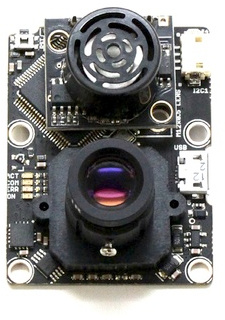
# 광류 센서
광류 센서는 속도 추정을 위하여 하향 카메라와 하향 거리 센서를 사용합니다. PX4는 센서 데이터와 다른 위치 정보(예 : GPS)를 연계하여 정확한 위치를 측정합니다. 광류 센서는 GPS 신호가 잡히지 않는 실내에서도 사용할 수 있습니다.
다른 옵션들은 다음과 같습니다:
# 센서 배선
센서들의 배선 방법는 일반적으로 비행 콘트롤러나 센서 제조사에서 매뉴얼로 제공합니다.
추가: