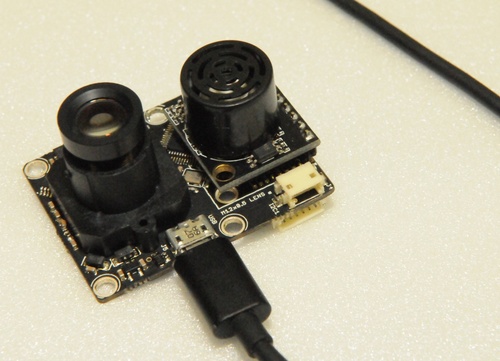
# PX4FLOW 스마트 카메라
PX4FLOW는 광류 스마트 카메라입니다. 기본 해상도는 752x480 픽셀이며, 400Hz에서 4x 구간 영역에서 광학 흐름을 계산하여 매우 높은 감광도를 제공합니다.
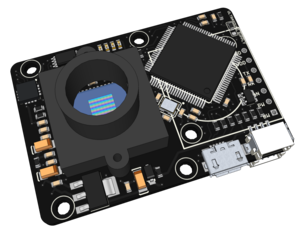
마우스 센서와 달리, 조명 LED 없이도 실내와 실외 낮은 조명에서도 작동합니다. 다른 기본적이고 효율적인 저수준 컴퓨터 비전 작업을 수행하도록 자유롭게 다시 프로그래밍 할 수 있습니다.
- 168 MHz Cortex M4F CPU (128 + 64 KB RAM)
- 752x480 MT9V034 이미지 센서, L3GD20 3D 자이로
- 16mm M12 렌즈 (IR 블록 필터)
- 크기: 45.5 mm x 35mm
- 소비 전력: 115mA / 5V
# 구매처
이 모듈을 아래에서 주문하십시오.
# 사양
- 글로벌 셔터가 있는 MT9V034 머신 비전 CMOS 센서
- 400Hz에서 4x4 구간 이미지에서 광류 처리
- 24x24 μm 수퍼 픽셀로 뛰어난 감광도
- 최대 2000°/s 및 780Hz 업데이트 속도의 온보드 16 비트 자이로스코프, 500°/s의 기본 고정밀 모드
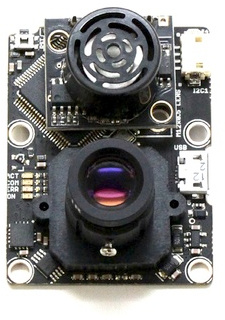
- 온보드 소나 입력 및 Maxbotix 소나 센서용 마운트. (HRLV-EZ4 권장, SparkFun 제품 링크 (opens new window))
- USB 부트로더
- 최대 921600 baud의 USB 직렬(QGroundControl (opens new window)이있는 라이브 카메라 보기 포함)
- USB 전원 옵션
- MatrixVision Bluefox MV 장착 구멍에 맞습니까? (카메라 중앙에서 벗어남)
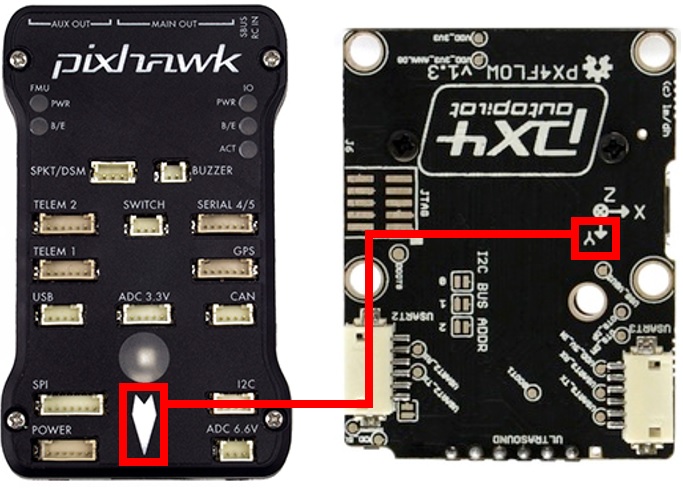
# 픽스호크 설정
PX4Flow 보드를 사용하려면 I2C 버스(모든 Pixhawk 시리즈 컨트롤러)에 연결하고 SENS_EN_PX4FLOW를 사용하여 드라이버를 활성화합니다.
PX4FLOW는 **1.9.0** 미만의 PX4 버전 FMUv5 (Pixhawk 4)에서는 작동하지 않습니다. 다른 모든 PX4/PX4-Autopilot 버전에서는 작동합니다.
단계는 아래와 같습니다:
- QGroundControl 에서:
- PX4Flow에서 펌웨어 업데이트 (왼쪽 상단 메뉴에서 CONFIG를 클릭한 다음 펌웨어 업그레이드를 클릭)
- 매개변수 SENS_EN_PX4FLOW를 설정하고 재부팅합니다 (매개변수 찾기 및 설정에 대한 정보는 매개 변수 참조).
- PX4Flow I2C를 Pixhawk I2C에 연결합니다.
활성화되면 부팅시 모듈이 감지됩니다. 자동 조종 장치가 USB로 연결되면, 흐름 데이터는 10Hz에서 전송되어야합니다. 흐름 데이터는 더 낮은 속도로 무선 채널에서 전송됩니다.
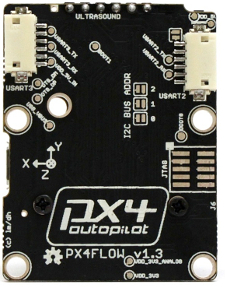
# 장착 및 방향
권장 장착 방향은 다음 그림과 같이 기체 전면을 향하는 플로우 보드의 Y로 정의됩니다.
PX4에서는 SENS_FLOW_ROT 매개변수로 방향을 설정합니다. 위의 방향은 SENS_FLOW_ROT=270도 (기본값)에 매핑됩니다.
PX4Flow 보드가 잘 장착되었는 지 확인하십시오.
PX4Flow는 상당한 양의 전자기 방사를 방출하므로, 가능하면 다른 전자 장치 (특히 GPS 모듈)에서 멀리 떨어져 있어야 합니다 (자세한 내용은 [하드웨어/문제/8](https://github.com/PX4/Hardware/issues/8) 참조).
# PX4 설정
설정 PX4Flow 매개변수는 다음과 같습니다.
| 매개변수 | 설명 |
|---|---|
| SENS_EN_PX4FLOW | PX4 Flow 드라이버를 시작합니다. |
| SENS_FLOW_MAXHGT | 광학 흐름에 의존시 지상 최대 높이 |
| SENS_FLOW_MINHGT | 광학 흐름에 의존시 지상 최소 높이. |
| SENS_FLOW_MAXR | 광류 센서로 안정적으로 측정 기능한 최대 각 유량. |
| SENS_FLOW_ROT | 차체 프레임을 기준 PX4FLOW 보드의 요 회전. |
ECL/EFK2 추정기와 함께 흐름을 사용하는 경우 Optical Flow > Estimators > EKF2 매개변수도 설정하여야 합니다. 이를 통하여 속도 계산을 위한 융합 광류 측정이 가능하며 센서가 차량 중앙에 있지 않은 경우 오프셋을 정의할 수 있습니다.
# 연결
PX4flow는 I2C 버스에 연결됩니다. 여러 장치를 동일한 버스에 연결하는 경우에는 각 장치를 고유 주소로 설정합니다. 다음 섹션에서 이 방법을 설명합니다.
# PX4FLOW I2C 장치 주소
PX4Flow의 기본 I2C 주소는 0x42이지만 "I2C BUS ADDR"이라고 표시된 3개의 솔더 점퍼를 사용하여 증가시킬 수 있습니다. 다른 장치의 주소가 같은 경우 사용할 수 있는 방법입니다.
주소 증분은 점퍼로 인코딩된 3 비트 값과 같습니다. 주소 증분은 점퍼로 인코딩된 3 비트 값과 같습니다. 모든 점퍼가 납땜되지 않은 경우, 자동조종장치 펌웨어에 의해 카메라가 자동으로 검색됩니다.
8개의 선택 가능 항목에 대한 주소 범위는 0x42 ~ 0x49입니다.
| 주소 | 비트 2 | 비트 1 | 비트 0 |
|---|---|---|---|
| 7 비트 주소 0x42 (기본값) | 0 | 0 | 0 |
| 7 비트 주소 0x43 | 0 | 0 | 1 |
| : | : | : | : |
| 7 비트 주소 0x49 | 1 | 1 | 1 |
TIP
다양한 I2C 판독 값을 사용할 수 있습니다. I2C 프레임과 I2C 통합 프레임에 대한 자세한 내용은 드라이버 소스 코드에 있습니다.
PX4Flow의 I2C 주소를 수정하는 경우 올바른 주소로 PX4 드라이버를 시작하여야 합니다.
px4flow start # address=0x42 (default)
px4flow stop
px4flow start -a 0x45 # address=0x45
# 렌즈 초점 맞추기
우수한 광류 품질을 보장하려면 카메라를 PX4Flow에 원하는 비행 높이로 초점을 맞추어야 합니다. To focus the camera, put an object with text on (e. g. 카메라 초점을 맞추려면 텍스트가 있는 개체 (예 : 책) PX4Flow를 USB에 연결하고 QGroundControl을 실행합니다. 설정 메뉴에서 PX4Flow를 선택하면 카메라 이미지가 표시됩니다. 고정 나사를 풀고 렌즈를 풀고 조여 초점이 맞는 위치를 찾아 렌즈의 초점을 맞춥니 다.
Note
3m 이상 비행하면 카메라가 무한대로 초점이 맞춰지며, 더 높은 비행을 위해 변경할 필요가 없습니다.

그림: 교과서를 사용하여 비행하려는 높이 (일반적으로 1-3 미터)에 흐름 카메라의 초점을 맞춥니 다. 3 미터 이상에서는 카메라가 무한대에 초점을 맞추고 모든 높은 고도에서 작동하여야 합니다.
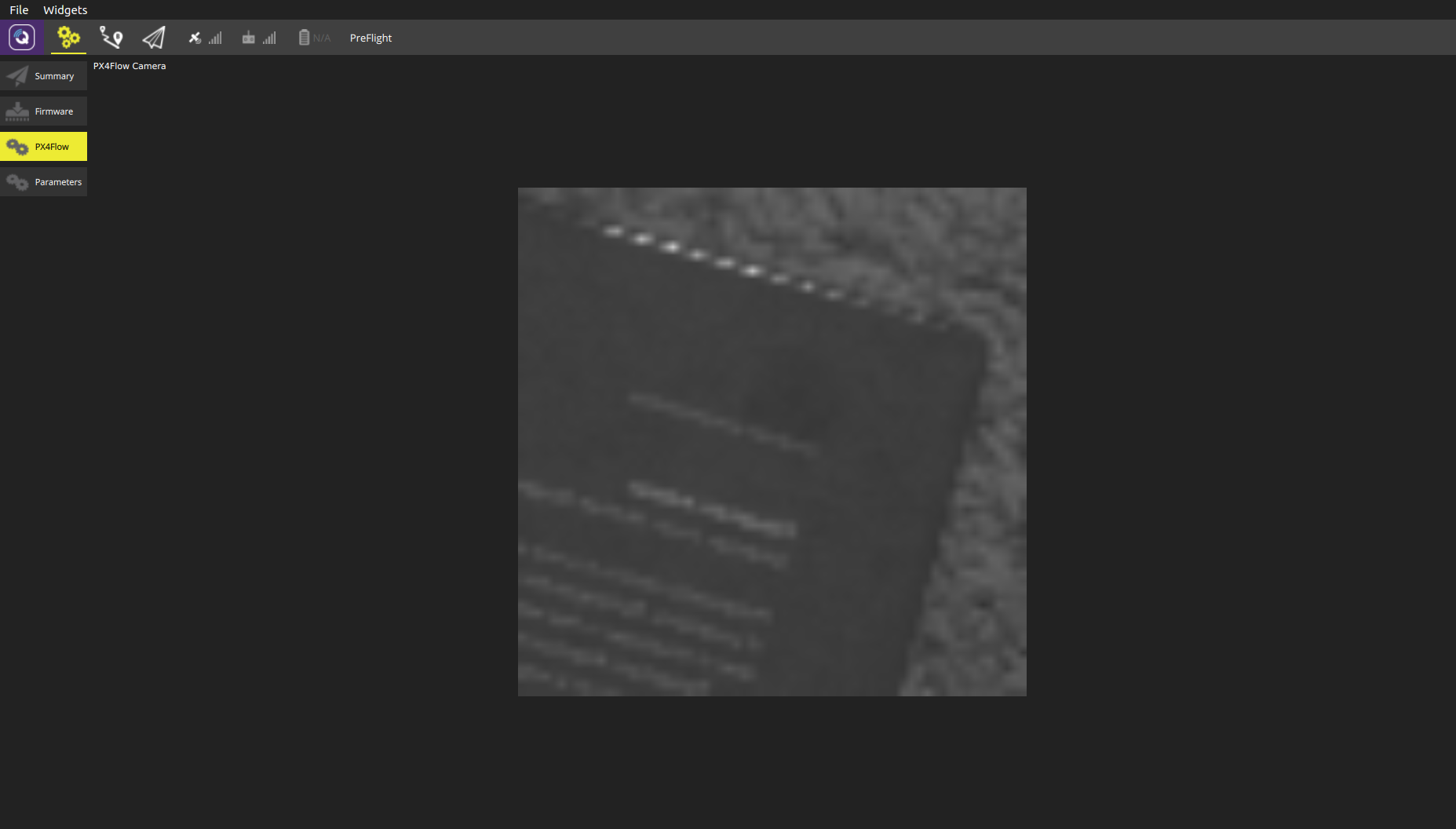
그림: 카메라 초점을 맞추는 데 사용할 수있는 QGroundControl px4flow 인터페이스
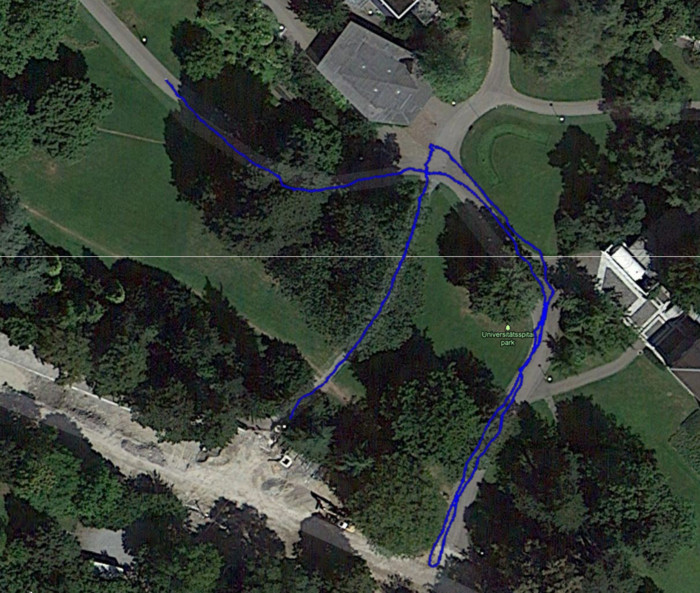
# 정확도
아래의 정사 사진은 공원 도로 위의 비행이 정확하게 측정되었음을 보여줍니다. 이것은 수동 비행에서 약 1.6m 고도에서 비행하는 7 "쿼드의 PX4FMU로 수행되었습니다. GPS 없음, 위치의 PX4FLOW 통합만.
# 다운로드
# 매뉴얼 및 회로도
- PX4FLOW v1.3 사용자 매뉴얼 (opens new window)
- PX4FLOW v1.3 회로도 및 레이아웃 (opens new window)
- 하드웨어 저장소의 문서: PX4/Hardware/FLOWv1 (opens new window)
# USB 드라이버
Linux와 MacOS에는 필수 드라이버가 함께 제공됩니다. Windows 드라이버는 px4flow_win_drivers.zip (opens new window)에서 다운로드할 수 있습니다.
# 논문
흐름 모듈은 독일 칼 스루에에서 열린 국제 로봇 및 자동화 회의 (ICRA 2013)의 논문으로 승인되었습니다.
- Dominik Honegger, Lorenz Meier, Petri Tanskanen and Marc Pollefeys: An Open Source and Open Hardware Embedded Metric Optical Flow CMOS Camera for Indoor and Outdoor Applications (opens new window)
# 라이브러리
다음은 프로젝트에서 흐름 모듈을 통합하는 타사 라이브러리입니다.
- mavros (opens new window) : Vladimir Ermakov가 관리하는 일반적인 MAVLink ROS 인터페이스
- [px-ros-pkg]](https://github.com/cvg/px-ros-pkg): Lionel Heng (hengli@inf.ethz.ch)에서 관리하는 PX4FLOW ROS (로봇 운영 체제) 인터페이스입니다.
- arduino-px4flow-i2c (opens new window): Laurent Eschenauer (laurent@eschenauer.be)가 관리하는 I2C 인터페이스를 래핑 Arduino 라이브러리입니다.
# 커넥터
- USART2 (J2): Hirose DF13 6 pos (Digi-Key Link: DF13A-6P-1.25H(20) (opens new window))
- Mates: Hirose DF13 6 pos housing (Digi-Key Link: Hirose DF13-6S-1.25C (opens new window))
- USART3 (J1): Hirose DF13 6 pos (Digi-Key Link: DF13A-6P-1.25H(20) (opens new window))
- Mates: Hirose DF13 6 pos housing (Digi-Key Link: Hirose DF13-6S-1.25C (opens new window))
- I2C1 (J3): Hirose DF13 4 pos (Digi-Key Link: DF13A-4P-1.25H(20) (opens new window) - discontinued)
- Mates: Hirose DF13 4 pos housing (Digi-Key Link: Hirose DF13-4S-1.25C (opens new window))
- USB (J5): Micro USB-B
- Mates: Cell phone data / charger cables, e.g. Digi-Key Link: ASSMANN AK67421-0.5-R (opens new window)
- ARM MINI JTAG (J6, //not populated per default//): 1.27 mm 10pos header (SHROUDED, for Black Magic Probe: Samtec FTSH-105-01-F-DV-K or (untested) or Harwin M50-3600542 (Digikey (opens new window) or Mouser (opens new window))
- JTAG 어댑터 옵션 #1: BlackMagic Probe (opens new window). 케이블없이 제공될 수 있습니다 (공급 업체에 확인). 그렇다면 Samtec FFSD-05-D-06.00-01-N 케이블 (Samtec 샘플 서비스 (opens new window) 또는 Digi-Key Link : SAM8218-ND (opens new window)) 및 Mini-USB 케이블
- JTAG Adapter Option #2: Digi-Key Link: ST-LINK/V2 (opens new window) / ST USER MANUAL (opens new window), needs an ARM Mini JTAG to 20pos adapter: Digi-Key Link: 726-1193-ND (opens new window)
- JTAG Adapter Option #3: SparkFun Link: Olimex ARM-TINY (opens new window) or any other OpenOCD-compatible ARM Cortex JTAG adapter, needs an ARM Mini JTAG to 20pos adapter: Digi-Key Link: 726-1193-ND (opens new window)
# 광학
올바른 광학 장치는 이미 장착되고 초점이 맞춰진 3D Robotics에 의해 제공됩니다.
- 렌즈 장착 (opens new window)
- 16mm M12 (S- 마운트) 렌즈 (IR 컷 필터 포함)
초점 거리는 측정 가능한 최대 속도에 영향을줍니다.
최대 속도 = +/- 4 픽셀 / (1 초 / 내부 업데이트 속도) *지면 거리 / 초점 거리 (픽셀)
내부 업데이트 속도는 400Hz입니다.
pixelize는 24 마이크로 미터이므로 16mm 렌즈의 초점 거리는 0.016 미터/픽셀 당 24 마이크로 미터 = 666.666 픽셀입니다.
다양한 초점 거리 렌즈와 지면 거리에 대한 최대 속도 :
| 지상 거리 | 1m | 3m | 10m |
|---|---|---|---|
| 16mm 렌즈 | 2.4m/s | 7.2m/s | 24m/s |
| 8mm 렌즈 | 4.8m/s | 14.4m/s | 48m/s |
| 6mm 렌즈 | 6.4m/s | 19.2m/s | 64m/s |
| 4mm 렌즈 | 9.6m/s | 28.8m/s | 96m/s |
max_vel = 4/(1/400) *지면 거리/(초점 길이/0.000024)
# 설정: 이미지 품질 및 출력
PX4FLOW는 카메라로 설계되지 않았지만, 모든 처리를 온칩으로 수행합니다. 이미지 품질과 출력을 설정할 수 있습니다 (이미지 출력은 렌즈의 초점을 맞추기 위한 것입니다).
- 연결되어있으면, 유량 센서를 분리합니다.
- 유량 센서를 연결합니다.
- In QGroundControl, click on Configuration > Firmware Update. Hit the big green Scan button.
- 유량 센서를 연결합니다. 성공적으로 업로드되면, 다음 단계가 표시됩니다.
- -* QGroundControl * 창을 최대화합니다. Click on Tool Widgets > Video Downlink
- 작동 거리 (일반 비행 고도)에서 이미지가 선명한 지 확인하십시오.
- 센서 초점을 맞추기 위해 더 높은 해상도를 얻으려면 ** Config {[--gt--]} 고급 구성 **을 선택하고 [VIDEO_ONLY] (# VIDEO_ONLY) 매개변수를 1로 설정합니다.
# 일반적인 문제 해결
- 연결되어있으면, 유량 센서를 분리합니다.
- QGroundControl을 시작하고 PX4 시작 모드를 선택하고 설정 > 펌웨어 업그레이드로 이동합니다.
- 스캔을 클릭합니다 (중앙의 녹색 버튼).
- 유량 센서를 연결합니다.
- 펌웨어 안정버전을 플래시합니다.
- 16mm 렌즈
- QGroundControl로 비디오 스트림 표시 (도구 위젯 > 비디오 다운 링크)
- 스트림에 줄무늬가 있는 지 확인하십시오. 줄무늬가 있으면,
IMAGE_TEST_PAT를 1로 설정하십시오. 위의 예제와 같아야 합니다. 이미지에 줄무늬가 있지만, 이 모드가 활성화되어 있으면, 줄무늬가 없는 경우 두 모드에서 이미지를 한 번 마우스 오른쪽 버튼으로 클릭하고 각 모드의 이미지를 저장하고 제조업체의 지원 팀에 전송합니다. - 선명한 이미지 획득 여부를 확인하십시오 (망원/줌 렌즈이므로 가시 영역이 작습니다).
- 스트림에 줄무늬가 있는 지 확인하십시오. 줄무늬가 있으면,
- 고해상도 이미지를 얻으려면,
VIDEO_ONLY매개변수를 1로 설정하십시오. - 작동 거리 (일반 비행 고도)에서 이미지가 선명한 지 확인하십시오.
TIP
아래 그림처럼 어두운 선이 보이는 왜곡된 이미지가있는 경우 도움을 요청 하십시오. 
# PX4FLOW 개발자 가이드
# 하드웨어 설정
- PX4FLOW Board v1.3
- HRLV-MaxSonar-EZ (MB1043)
- 16mm 렌즈
- Micro USB 케이블
# 소프트웨어 / 빌드 소스
- PX4FLOW 센서를 USB로 PC에 연결합니다.
- PX4FLOW 펌웨어 (Github의 펌웨어 소스 코드: PX4/Flow (opens new window))
PX4FLOW 펌웨어 (Github의 펌웨어 소스 코드: PX4/Flow (opens new window))
# 빌드
PX4 도구 모음을 설치합니다. git을 사용하여 https://github.com/PX4/Flow 에서 소스를 복제합니다.
cd flow
make all
make upload-usb
유량 센서를 연결합니다. 성공적으로 업로드되면, 다음 단계가 표시됩니다.
/dev/ttyACM1에서 보드 6,0 부트 로더 rev 3을 찾았습니다.
삭제...
program...
verify...
done, rebooting.
# 문제 해결
앞 단계를 볼 수 없는 경우에는 모뎀 관리자를 다음과 같이 제거하여야 합니다.
sudo apt-get remove modemmanager
사용자는 또한 plugdev 그룹에 있어야 합니다.
sudo usermod -a -G plugdev $USER
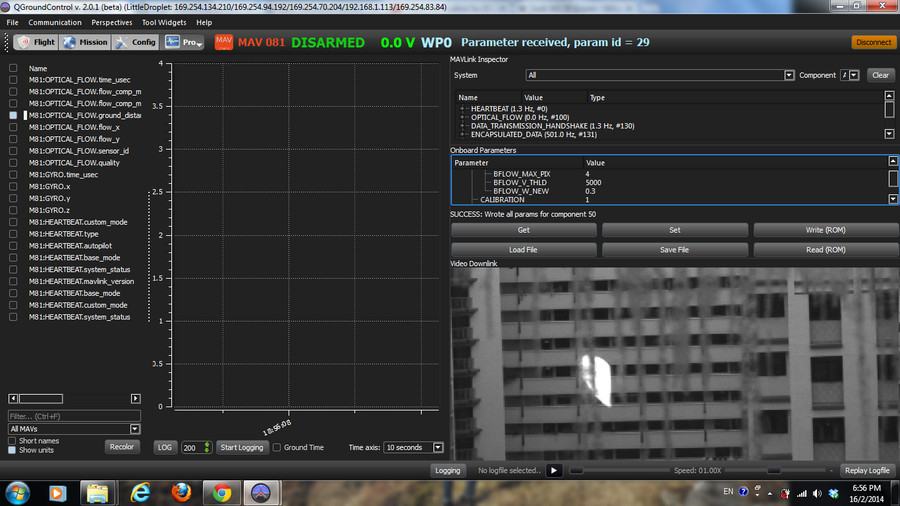
# 이미지 초점
PX4FLOW를 QGroundControl에 연결합니다.
- PX4FLOW 센서를 USB로 PC에 연결합니다.
- QGroundControl을 실행합니다
- Plot 퍼스펙티브로 전환: Perspectives/Plot
- PX4FLOW 센서에 연결: 통신/링크 추가
- 링크 유형: 직렬
- 프로토콜: MAVLink
- 직렬 포트: 해당 포트 (예: /dev/ttyACM* 또는 COMM*)
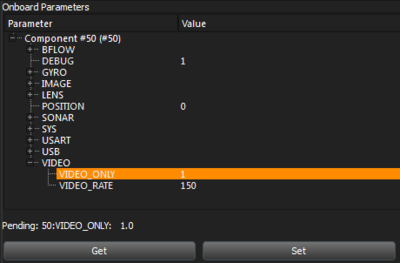
이제 새로운 무인 시스템이 나타나고, 온보드 매개변수가로드됩니다. 그렇지 않은 경우에는 "Get"을 클릭합니다.
매개변수 VIDEO_ONLY를 1로 변경하고 설정을 누릅니다.
위젯 비디오 다운 링크는 전체 해상도로 이미지를 보여줍니다. 렌즈의 초점을 1.5m에 맞춥니 다. 렌즈 위치를 고정하고 VIDEO_ONLY 모드를 끕니다.
# 데이터 출력
PX4FLOW 모듈은 USB와 직렬 포트에서 MAVLink (opens new window) 패킷을 출력합니다. QGroundControl (opens new window)을 사용하여 모듈에서 데이터를 읽습니다. 센서 데이터 읽기를 위한 I2C 인터페이스도 제공됩니다. 타사 라이브러리를 사용하여 프로젝트에서 PX4FLOW 데이터를 연결하고 통합할 수 있습니다.
- USART3: 115200의 MAVLink, 8N1 보드: OPTICAL_FLOW (opens new window) 메시지, OPTICAL_FLOW_RAD (opens new window), HEARTBEAT (opens new window) 메시지
- USB: 전송 속도는 관련이 없습니다 (USB는이를 무시함) :
OPTICAL_FLOW메시지,OPTICAL_FLOW_RAD,HEARTBEAT메시지, 이미지. - I2C1: 판독 가능한 마지막 I2C 판독 이후 최신 흐름 값 (i2c_frame) 및 누적 흐름 (i2c_integral_frame) 값.
# PX4FLOW 매개변수
아래의 목록은 PX4FLOW 펌웨어에서 현재 사용 가능한 매개변수에 대한 간단한 설명입니다.
WARNING
매개변수는 현재 ROM에 기록되지 않습니다 (정전시 재설정됨). 이를 변경하려면 위의 PX4FLOW 개발자 안내서의 지침을 사용하여 자신의 펌웨어 버전을 빌드하십시오. 관련 매개변수는 여기 (opens new window)를 참고하십시오.
# BFLOW_F_THRD
이 매개변수는 기능 임계 값이며, 바닥 흐름을 계산하는 데 사용되는 패턴의 품질을 제한합니다. 낮은 값 (예 : 10)의 경우 거의 모든 패턴이 사용되며, 높은 값 (예 : 100)의 경우 중요한 패턴만 사용됩니다.
# BFLOW_V_THRD
이는 잘못된 일치를 필터링하는 패턴 상관 임계 값입니다. 낮음은 강한 상관 관계만 허용됨을 의미합니다.
# 기타
| 이름 | 기본값 | 접근 | 설명 |
|---|---|---|---|
| AEC | 1 | RW | 카메라 자동 노출 제어. 1: ON, 0: OFF. |
| AGC | 1 | RW | 카메라 자동 이득 제어. 1: ON, 0: OFF. |
| BFLOW_F_THLD | 40 | RW | 이 매개변수는 기능 임계 값이며, 바닥 흐름을 계산하는 데 사용되는 패턴의 품질을 제한합니다. 낮은 값 (예 : 10)의 경우 거의 모든 패턴이 사용되며, 높은 값 (예 : 100)의 경우 중요한 패턴만 사용됩니다. |
| BFLOW_V_THLD | 5000 | RW | 이는 잘못된 일치를 필터링하는 패턴 상관 임계 값입니다. 낮음은 강한 상관 관계만 허용됨을 의미합니다. |
| BFLOW_HIST_FIL | 0 | RW | 흐름 히스토그램 필터. 1: ON, 0: OFF. |
| BFLOW_GYRO_COM | 0 | RW | 자이로 보상. 1: ON, 0: OFF. |
| BFLOW_LP_FIL | 0 | RW | 유량 출력의 저역 통과 필터. 1: ON, 0: OFF. |
| BFLOW_W_NEW | 0.3 | RW | 흐름 저역 통과 필터 이득 |
| BFLOW_MAX_PIX | 8 | R | 삭제 (매개변수가 사용되지 않음). |
| BFLOW_RATE | 10.0 | RW | 광학 흐름에 대한 업데이트가 게시되는 비율 |
| BRIGHT | 20 | RW | 카메라에서 원하는 밝기 수준 |
| DEBUG | 1 | RW | 디버깅 메시지. 1: ON, 0: OFF |
| EXPOSURE_MAX | 500 | RW | 최대 노출 시간 (μs) |
| GAIN_MAX | 16 | RW | 최대 이득 (단위?) |
| GYRO_SENS_DPS | 250 | RW | 자이로스코프 감도: 250, 500, 2000 (dps) |
| GYRO_COMP_THR | 0.01 | RW | 자이로 보정 임계 값 (dps):이 임계 값보다 낮은 자이로 데이터는 드리프트를 방지하기 위하여 보정되지 않습니다. |
| HDR | 1 | RW | 카메라 HDR (High Dynamic Range). 1: ON, 0: OFF |
| IMAGE_HEIGHT | 64 | R | 이미지 높이 (픽셀) |
| IMAGE_WIDTH | 64 | R | 이미지 넓이 (픽셀) |
| IMAGE_L_LIGHT | 0 | RW | 삭제 (매개변수가 사용되지 않음). |
| IMAGE_NOISE_C | 1 | RW | 이미지 센서 노이즈 보정, 1 : ON, 0 : OFF |
| IMAGE_TEST_PAT | 0 | RW | 회색 음영 테스트 패턴 모드. 1: ON, 0: OFF |
| LENS_FOCAL_LEN | 16.0 | RW | 렌즈 초점 거리 (mm) |
| POSITION | 0 | RW | 0 : 위치 0 만 사용됨 (아래: 0, 전면: 1, 위: 2, 후면: 3, 오른쪽: 4, 왼쪽: 5) |
| SHTR_W_1 | 443 | RW | 카메라 셔터 W_1 ? |
| SHTR_W_2 | 473 | RW | 카메라 셔터 W_2 ? |
| SHTR_W_TOT | 480 | RW | 카메라 셔터 합계 ? |
| SONAR_FILTERED | 0 | RW | 소나 출력에 대한 칼만 필터. 1: ON, 0: OFF. |
| SONAR_KAL_L1 | 0.8461 | RW | Sonar 칼만 게인 L1 (포지션 용) |
| SONAR_KAL_L2 | 6.2034 | RW | Sonar 칼만 게인 L2 (속도 용) |
| SYS_ID | 81 | RW | MAVLink (opens new window) 시스템 ID |
| SYS_COMP_ID | 50 | RW | MAVLink (opens new window) 컴포넌트 ID |
| SYS_SENSOR_ID | 77 | RW | MAVLink (opens new window) 센서 ID |
| SYS_TYPE | 0 | RW | MAVLink (opens new window) 시스템 유형 (0은 일반을 의미) |
| SYS_AP_TYPE | 0 | RW | MAVLink (opens new window) Autopilot 유형 (0은 일반을 의미) |
| SYS_SW_VER | 13XX | R | 소프트웨어 버전 |
| SYS_SEND_STATE | 1 | RW | MAVLink (opens new window) 하트 비트를 전송합니다. 1: ON, 0: OFF. |
| SYS_SEND_LPOS | 1 | RW | MAVLink (opens new window) 지역 위치 추정치를 전송합니다. 1: ON, 0: OFF. |
| USART_2_BAUD | 115200 | R | Baudrate USART 2 |
| USART_3_BAUD | 115200 | R | Baudrate USART 3 (데이터 출력) |
| USB_SEND_DEBUG | 1 | RW | USB를 통하여 디버그 메시지를 전송합니다. 1: ON, 0: OFF. |
| USB_SEND_FLOW | 1 | RW | USB를 통하여 흐름을 전송합니다. 1: ON. 0: OFF. |
| USB_SEND_FWD | 0 | RW | USB를 통하여 전달된 흐름을 전송합니다. 1: ON, 0: OFF. |
| USB_SEND_GYRO | 1 | RW | USB를 통하여 자이로 데이터를 전송합니다. 1: ON, 0: OFF. |
| USB_SEND_VIDEO | 1 | RW | USB를 통하여 비디오를 전송합니다. 1: ON, 0: OFF. |
| VIDEO_ONLY | 0 | RW | 고해상도 비디오 모드. 1: ON, 0: OFF |
| VIDEO_RATE | 50 | RW | 비디오 전송 이미지 사이의 시간 (ms) |
# 모드
# 비디오 전용 모드
고해상도 모드의 경우 VIDEO_ONLY를 1로 설정합니다. 이 모드에서는 렌즈 초점 프로세스를 용이하게 하기 위하여 카메라 이미지가 더 높은 해상도로 전송됩니다. 이 모드에서는 유량 값이 계산되지 않습니다.
# 패턴 테스트 모드
매개변수 IMAGE_TEST_PAT이 1로 설정된 경우 센서는 신호 체인에 수직 회색 음영 테스트 패턴을 삽입합니다.
- 테스트 패턴 64x64 (비디오 전용 모드가 꺼짐)

- 테스트 패턴 376x240 (비디오 전용 모드가 켜짐)
