# Package Delivery in Missions (Development)
A package delivery mission is an extension of a waypoint mission, where a user can plan delivering a package as a waypoint.
This topic explains the architecture for the package delivery feature. It is intended for developers working on extending the architecture, for example to support new payload delivery mechanisms.
Note
Currently only Grippers can be used for package delivery. Winches are not yet supported.
Note
The detailed documentation on how to setup a package delivery mission plan can be found here. Setup for the payload_deliverer module is covered in the documentation for the delivery mechanism, such as Gripper.
# Package Delivery Architecture Diagram
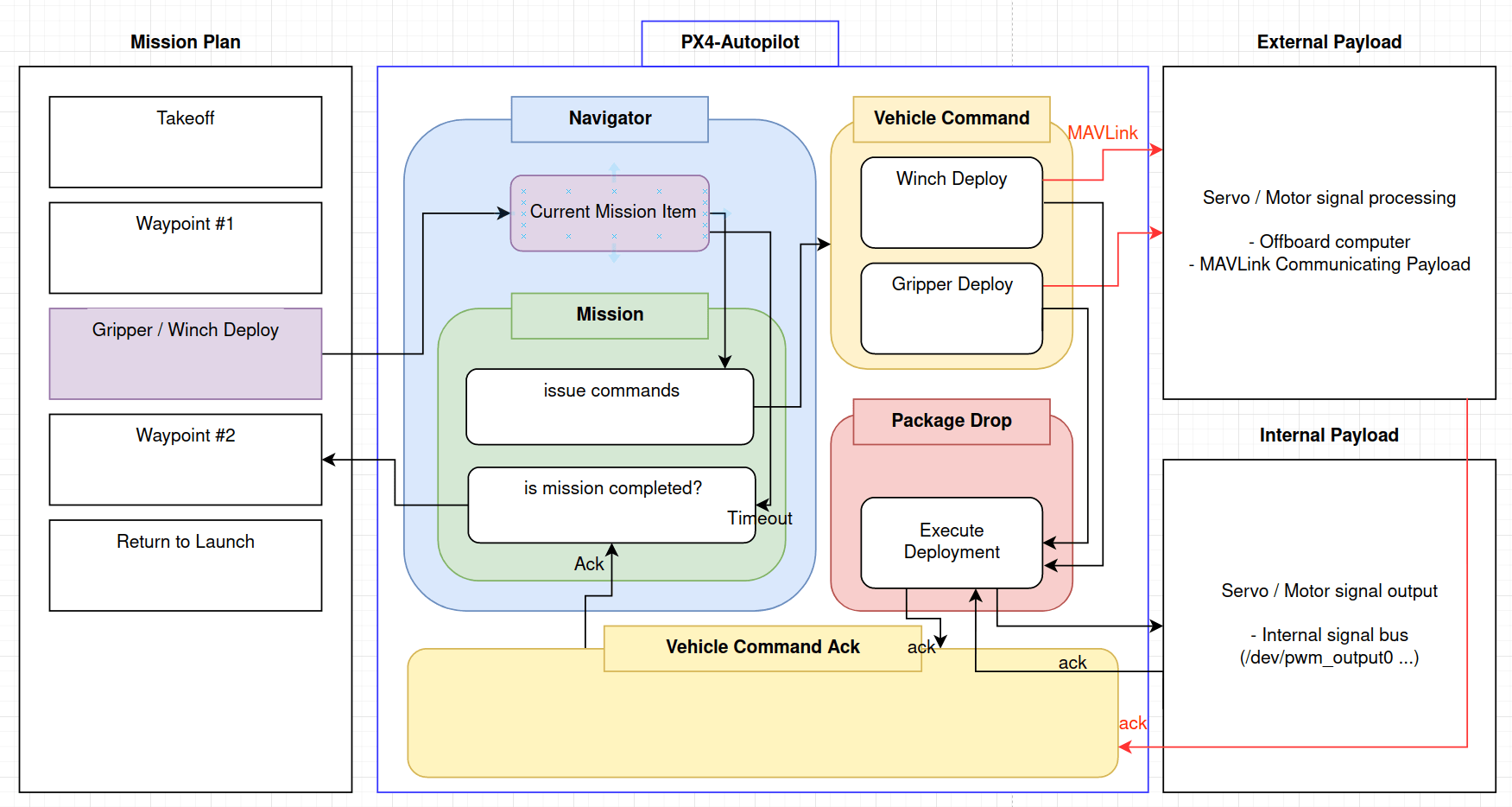
Package Delivery feature is centered around the VehicleCommand & VehicleCommandAck messages.
The central idea lies in having an entity that handles the DO_GRIPPER or DO_WINCH vehicle command, executes it and sends back an acknowledgement when the successful delivery is confirmed.
Because PX4 automatically broadcasts the VehicleCommand uORB message to a UART port configured to communicate in MAVLink as a COMMAND_LONG (opens new window) message, an external payload can receive the command and execute it.
Likewise, since PX4 automatically translates the COMMAND_ACK (opens new window) message coming in from an external source through a UART port configured for MAVLink into a vehicle_command_ack uORB message, an external payload's acknowledgement for a successful package deployment can be received by PX4's navigator module.
Below, each entity involved in the package delivery architecture is explained.
# Navigator
Navigator handles the reception of the vehicle command ACK (described below). Upon reception of a successful deployment ack message, it sets the flag in Mission block level to signal that the payload deployment has been successful.
This allows the mission to proceed to a next item (e.g. Waypoint) safely, as we are sure with the acknowledgement that the deployment has been successful.
# Vehicle Command ACK
We are waiting for the ACK coming from either internally (via payload_deliverer module), or externally (external entity sending the MAVLink message COMMAND_ACK) to determine if the package delivery action has been successful (either DO_GRIPPER or DO_WINCH).
# Mission
The Gripper / Winch command is placed as a Mission Item. This is possible since all the Mission item has the MAV_CMD to execute (e.g. Land, Takeoff, Waypoint, etc) which can get set to either DO_GRIPPER or DO_WINCH.
In the Mission logic (green box above) if either Gripper/Winch mission item is reached, it implements brake_for_hold functionality (which sets the valid flag of the next mission item waypoint to false) for rotary wings (e.g. Multicopter) so that the vehicle would hold it's position while the deployment is getting executed.
For fixed-wing and other vehicles, no special braking condition is considered. So if you have a loiter mission item for a fixed-wing, it will execute the delivery whilst doing the loiter, and won’t come to a stop (as it’s impossible)
# Mission Block
MissionBlock is the parent class of Mission that handles the part "Is Mission completed?".
This all performed in the is_mission_item_reached_or_completed function, to handle the time delay / mission item advancement.
Also it implements the actual issue_command function, which will issue a vehicle command corresponding to the mission item's MAV_CMD, which will then be received by an external payload or the payload_deliverer module internally.
# Payload Deliverer
This is a dedicated module that handles gripper / winch support, which is used for the standard package delivery mission plan.
Setup for the payload_deliverer module is covered within setting up an actual package release mechanism setup documentation like Gripper.