# 고급 비행 콘트롤러 방향 설정
방향과 수평 평형은 센서 보드의 작은 정렬 불량이나 사소한 교정 오류를 수정하기 위하여 매개변수를 사용하여 수동으로 미세 조정 가능합니다.
Note
These instructions are not recommended for regular users. 기본 설정은 아래의 지침을 참고하십시오.
기체가 계속 쏠린다면(멀티로터에서 종종 볼 수 있지만, 다른 기체에도 해당됨), RC 송신기의 트리머를 활용하기 보다는 오프셋 각도 매개변수를 미세 조정하여 트리밍하는 것이 좋습니다. 이 방법은 자율 비행시 항공기가 트리밍을 유지합니다.
# 방향 매개변수 설정
방향 매개변수를 변경하려면 :
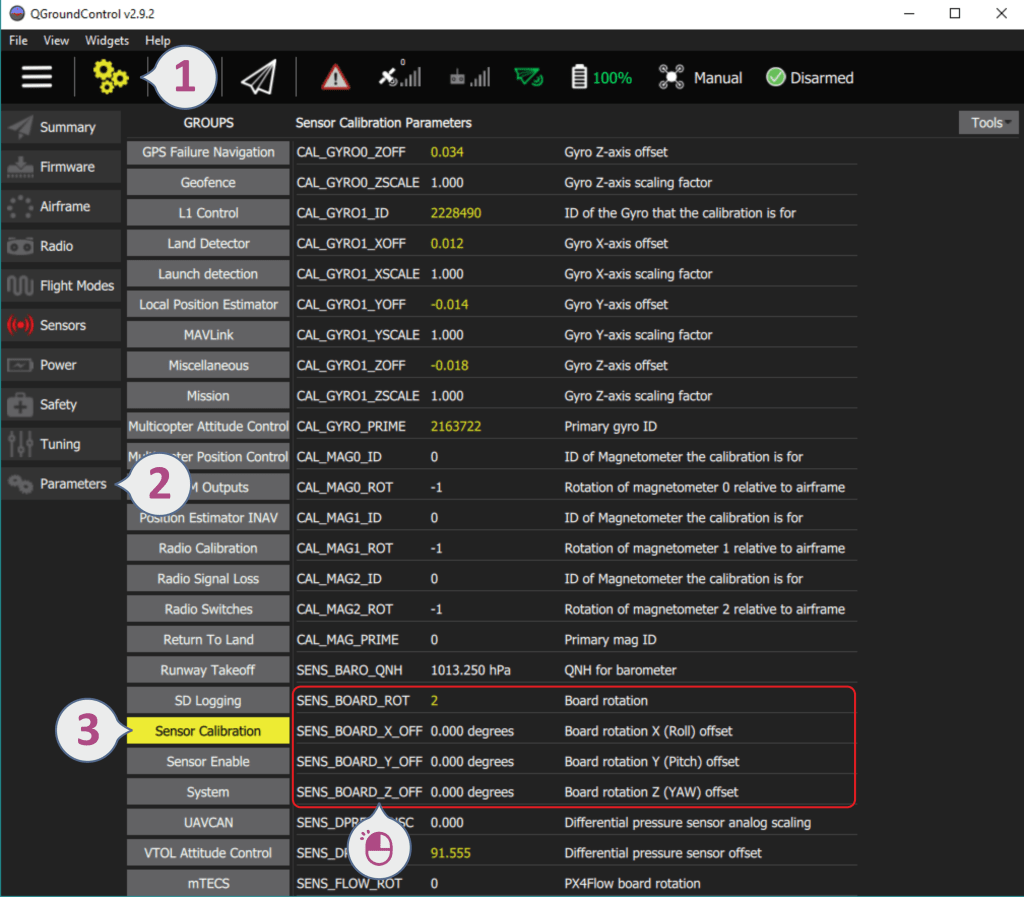
- QGroundControl에서 다음 메뉴를 오픈합니다: 설정 > 매개변수 > 센서 보정.
- 아래와 같이 매개변수 값을 변경합니다.
# 매개변수 정보
SENS_BOARD_ROT 매개변수는 플랫폼에 상대적인 회전을 정의며, X, Y, Z 미세 조정 오프셋 값은 보드 자체에 상대적 고정값으로 저장합니다. 비행 제어장치의 Yaw, Pitch 및 Roll 방향의 전체 오프셋 각도를 가져올 용도로 미세 조정 오프셋 값을 SENS_BOOD_ROT 각도 값에 더합니다.
SENS_BOARD_ROT
이 매개변수는 플랫폼에 대한 FMU 보드의 회전을 정의합니다. 가능한 값은 다음과 같습니다.
- 0 = 회전 없음
- 1 = Yaw 45°
- 2 = Yaw 90°
- 3 = Yaw 135°
- 4 = Yaw 180°
- 5 = Yaw 225°
- 6 = Yaw 270°
- 7 = Yaw 315°
- 8 = Roll 180°
- 9 = Roll 180°, Yaw 45°
- 10 = Roll 180°, Yaw 90°
- 11 = Roll 180°, Yaw 135°
- 12 = Pitch 180°
- 13 = Roll 180°, Yaw 225°
- 14 = Roll 180°, Yaw 270°
- 15 = Roll 180°, Yaw 315°
- 16 = Roll 90°
- 17 = Roll 90°, Yaw 45°
- 18 = Roll 90°, Yaw 90°
- 19 = Roll 90°, Yaw 135°
- 20 = Roll 270°
- 21 = Roll 270°, Yaw 45°
- 22 = Roll 270°, Yaw 90°
- 23 = Roll 270°, Yaw 135°
- 24 = Pitch 90°
- 25 = Pitch 270°
SENS_BOARD_X_OFF
PX4FMU의 X축 또는 Roll 축을 중심의 도(°) 단위의 회전 오프셋입니다. Positive angles increase in CCW direction, negative angles increase in CW direction.
SENS_BOARD_Y_OFF
PX4FMU의 Y축 또는 Pitch 축을 중심의 도(°) 단위의 회전 오프셋입니다. Positive angles increase in CCW direction, negative angles increase in CW direction.
SENS_BOARD_Z_OFF
PX4FMU의 Z축 또는 Yaw 축을 중심의 도(°) 단위의 회전 오프셋입니다. Positive angles increase in CCW direction, negative angles increase in CW direction.