# ROS with Gazebo Classic Simulation
ROS (Robot Operating System) can be used with PX4 and the Gazebo Classic simulator. MAVROS MAVLink 노드를 사용하여 PX4와 통신합니다.
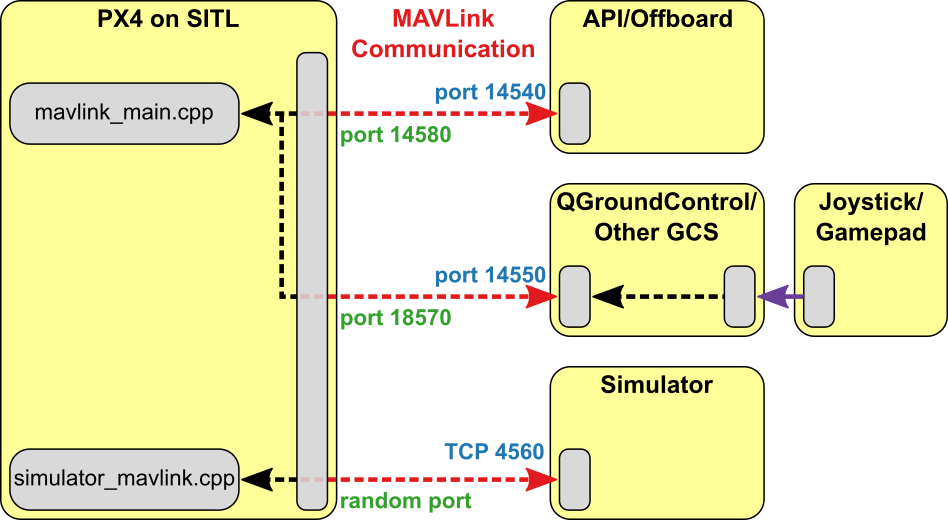
The ROS/Gazebo Classic integration with PX4 follows the pattern in the diagram below (this shows the generic PX4 simulation environment). PX4 communicates with the simulator (e.g. Gazebo Classic) to receive sensor data from the simulated world and send motor and actuator values. GCS 및 Offboard API(예: ROS)와 통신하여 시뮬레이션된 환경에서 텔레메트리 데이터를 전송하고 명령을 수신합니다.
Note
"정상 동작"과의 유일한 약간의 차이점은 ROS가 포트 14557에서 연결을 시작하지만, 오프보드 API가 UDP 포트 14540에서 연결을 수신 대기하는 것이 더 일반적입니다. 스크립트는 필요한 모든 구성 항목, PX4, ROS "키네틱", 가제보 7 모의 시험 환경, MAVROS를 설치합니다.
# Installing ROS and Gazebo Classic
Note
ROS는 Linux(MacOS와 Windows 제외)에서만 지원됩니다.
Ubuntu Linux에서 ROS로 PX4 시뮬레이션을 설정하는 가장 쉬운 방법은 Linux의 개발 환경 > ROS Gazebo의 표준 설치 스크립트를 사용하는 것입니다. The script installs everything you need: PX4, ROS "Melodic", the Gazebo Classic 9 simulator, and MAVROS.
Note
스크립트는 Gazebo 9가 포함된 표준 ROS "Melodic" 설치 지침 (opens new window)을 따릅니다. 이 기능을 지원하려면, 가제보를 적당한 ROS 래퍼와 함께 실행해야합니다.
# ROS 시뮬레이션 실행
아래 명령을 사용하여 시뮬레이션을 시작하고, MAVROS를 통해 시뮬레이션에 ROS를 연결할 수 있습니다. 여기서 fcu_url은 시뮬레이션을 실행하는 컴퓨터의 IP/포트입니다.
roslaunch mavros px4.launch fcu_url:="udp://:14540@192.168.1.36:14557"
localhost에 연결하려면 다음 URL을 사용하십시오.
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"
Note
It can be useful to call roslaunch with the -w NUM_WORKERS (override number of worker threads) and/or -v (verbose) in order to get warnings about missing dependencies in your setup. 예:
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"
위에서 언급한 실행 파일 중 하를 여러분의 실행 파일 목록에 넣어 ROS 프로그램을 모의 시험 환경에서 실행할 수 있게 하십시오.
# Launching Gazebo Classic with ROS Wrappers
The Gazebo Classic simulation can be modified to integrate sensors publishing directly to ROS topics e.g. the Gazebo Classic ROS laser plugin. To support this feature, Gazebo Classic must be launched with the appropriate ROS wrappers.
ROS로 래핑된 시뮬레이션을 실행하는 데 사용할 수 있는 ROS 시작 스크립트가 있습니다.
- posix_sitl.launch (opens new window): plain SITL launch
- mavros_posix_sitl.launch (opens new window): SITL과 MAVROS
ROS에 래핑된 SITL을 실행하려면 ROS 환경을 업데이트한 다음, 평소와 같이 시작하여야 합니다.
(선택 사항): 소스에서 MAVROS 또는 다른 ROS 패키지를 컴파일한 경우에만 catkin 작업 공간을 소싱합니다.
cd <PX4-Autopilot_clone>
DONT_RUN=1 make px4_sitl_default gazebo-classic
source ~/catkin_ws/devel/setup.bash # (optional)
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic
roslaunch px4 posix_sitl.launch
위에서 언급한 시작 파일 중 하나를 자체 시작 파일에 포함하여, 시뮬레이션에서 ROS 애플리케이션을 실행합니다.
# 움직임 뒤에서 일어나는 일
이 섹션에서는 이전에 제공된 roslaunch 지침이 실제로 어떻게 작동하는 지 설명합니다(시뮬레이션 및 ROS를 수동으로 시작하려면 지침을 따를 수 있습니다).
You will need three terminals, in all of them the ros environment must be sourced.
아래 명령어를 사용하여 시뮬레이터를 시작합니다.
cd <PX4-Autopilot_clone>
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
roslaunch px4 px4.launch
콘솔 화면은 다음과 같이 나타납니다:
INFO [px4] instance: 0
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] startup script: /bin/sh etc/init.d-posix/rcS 0
INFO [init] found model autostart file as SYS_AUTOSTART=10016
INFO [param] selected parameter default file parameters.bson
INFO [param] importing from 'parameters.bson'
INFO [parameters] BSON document size 295 bytes, decoded 295 bytes (INT32:12, FLOAT:3)
INFO [param] selected parameter backup file parameters_backup.bson
INFO [dataman] data manager file './dataman' size is 7866640 bytes
etc/init.d-posix/rcS: 31: [: Illegal number:
INFO [init] PX4_SIM_HOSTNAME: localhost
INFO [simulator_mavlink] Waiting for simulator to accept connection on TCP port 4560
In the second terminal make sure you will be able to start gazebo with the world files defined in PX4-Autopilot. To do this set your environment variables to include the appropriate sitl_gazebo-classic folders.
cd <PX4-Autopilot_clone>
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic
Now start Gazebo Classic like you would when working with ROS
roslaunch gazebo_ros empty_world.launch world_name:=$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds/empty.world
In the third terminal make sure you will be able to spawn the model with the sdf files defined in PX4-Autopilot. To do this set your environment variables to include the appropriate sitl_gazebo-classic folders.
cd <PX4-Autopilot_clone>
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic
Now insert the Iris quadcopter model like you would when working with ROS. Iris가 로드되면 자동으로 px4 앱에 연결됩니다.
rosrun gazebo_ros spawn_model -sdf -file $(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris/iris.sdf -model iris -x 0 -y 0 -z 0 -R 0 -P 0 -Y 0