# AUAV-X2 Autopilot (Discontinued)
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer (opens new window) for hardware support or compliance issues.
WARNING
This flight controller has been discontinued and is no longer commercially available.
The AUAV® (opens new window) AUAV-X2 autopilot is based on the Pixhawk®-project (opens new window) FMUv2 open hardware design. It runs PX4 on the NuttX (opens new window) OS.
# Quick Summary
- Main System-on-Chip: STM32F427 (opens new window)
- CPU: STM32F427VIT6 ARM microcontroller - Revision 3
- IO: STM32F100C8T6 ARM microcontroller
- Sensors:
- Invensense MPU9250 9DOF
- Invensense ICM-20608 6DOF
- MEAS MS5611 barometer
- Dimensions/Weight
- Size: 36mm x 50mm
- Mounting Points: 30.5mm x 30.5mm 3.2mm diameter
- Weight: 10.9g
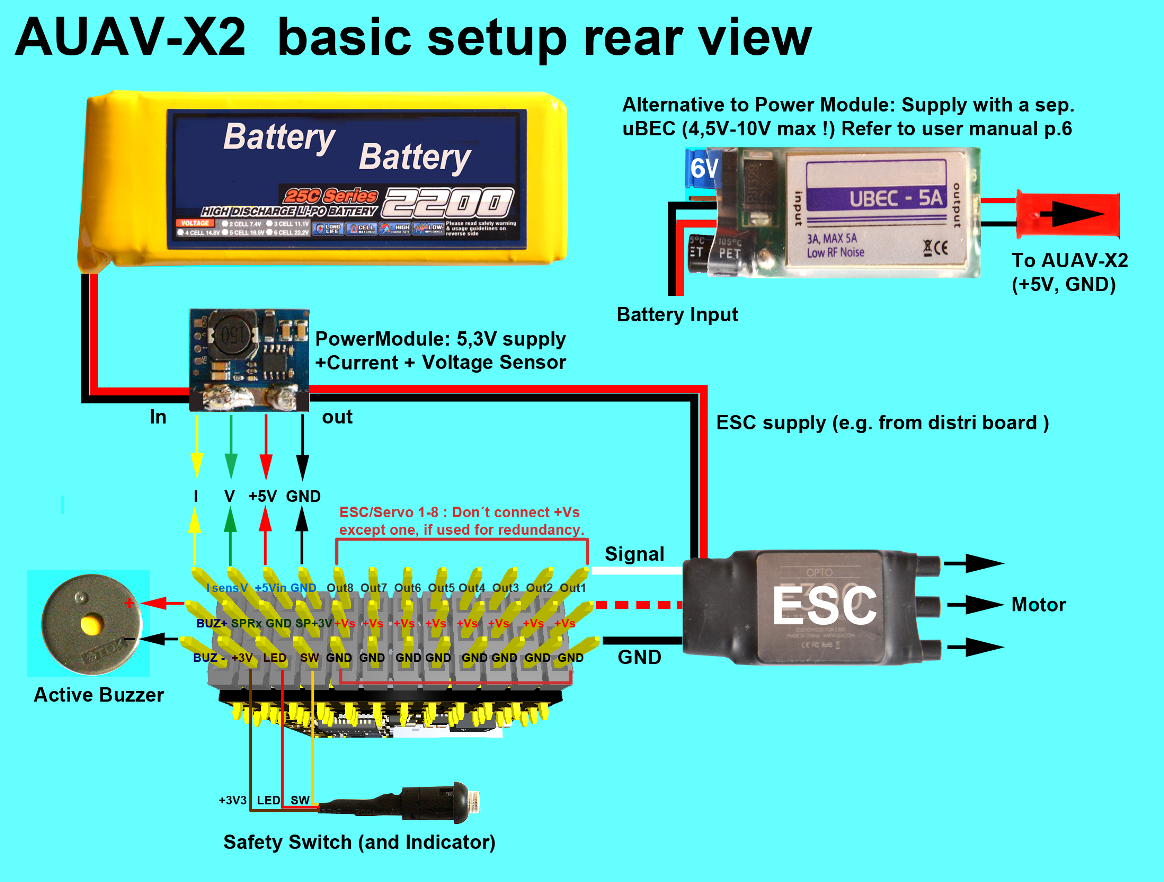
- Power OR-ing schematic with reverse voltage protection. 5V power module is required!
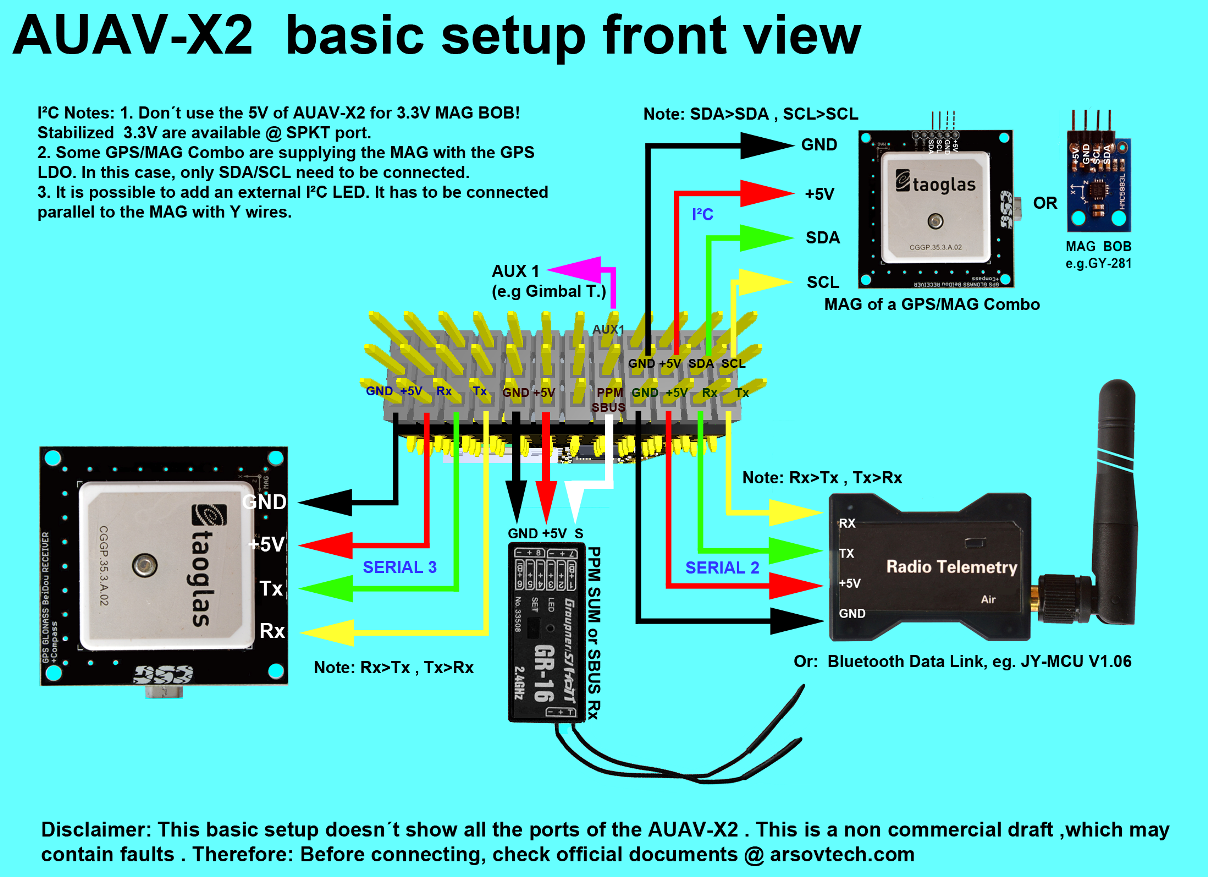
# Connectivity
- 2.54mm headers:
- GPS (USART4)
- i2c
- RC input
- PPM input
- Spektrum input
- RSSI input
- sBus input
- sBus output
- Power input
- Buzzer output
- LED output
- 8 x Servo outputs
- 6 x Aux outputs
- USART7 (Console)
- USART8 (OSD)
# Availability
No longer in production. This has been superceded by the mRo X2.1. mRobotics is the distributor for the AUAV Products from August 2017.
# Key Links
# Wiring Guide
# Schematics
The board is based on the Pixhawk project (opens new window) FMUv2 open hardware design.
- FMUv2 + IOv2 schematic (opens new window) -- Schematic and layout
Note
As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are available (opens new window).
# Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
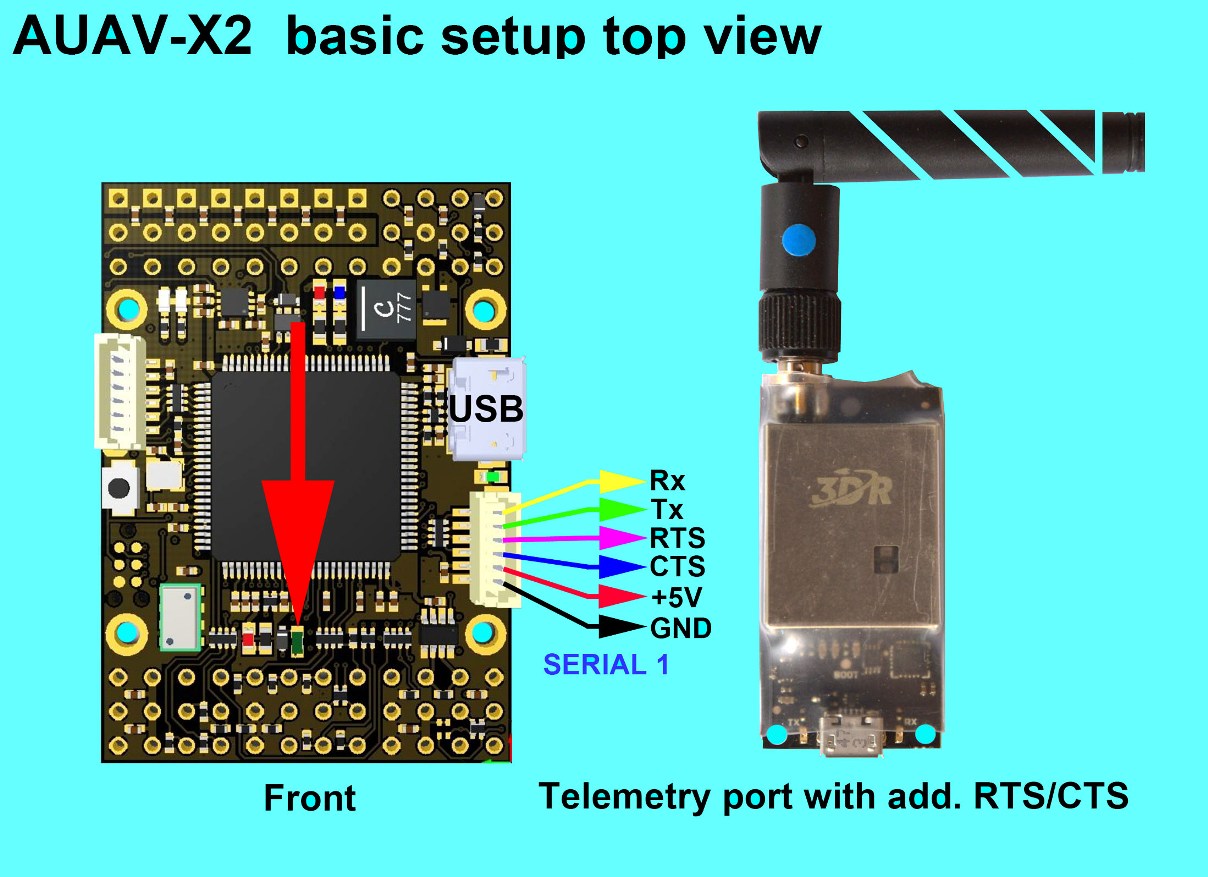
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |