# 임무
# 임무 계획하기
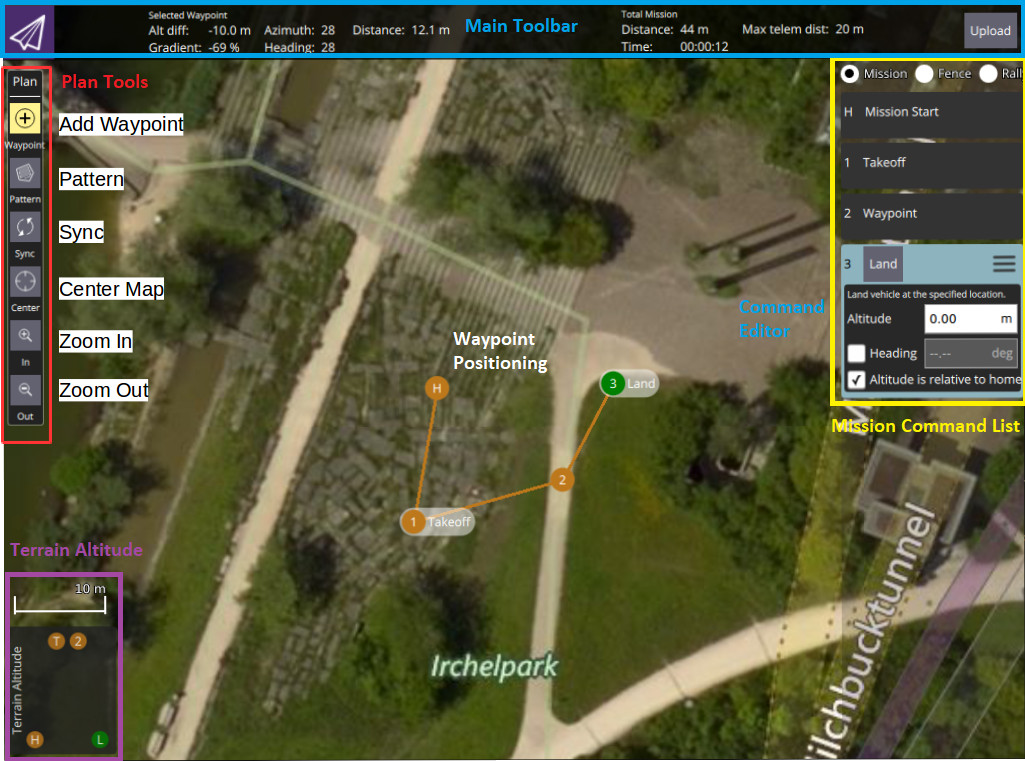
수동으로 임무를 계획하는 것은 비교적 간단합니다.
- 임무 보기로 전환합니다.
- 왼쪽 상단에서 경유지 추가 ( "더하기") 아이콘을 선택합니다.
- 지도를 클릭하여 경유지를 추가합니다.
- 경유지 매개 변수와 유형을 수정하려면 오른쪽의 경유지 목록을 사용하십시오. 하단의 고도 표시기는 각 경유지의 상대 고도를 표시합니다.
- 업로드 버튼 (오른쪽 상단)을 클릭하여 차량에 임무를 전송합니다.
패턴 도구를 사용하여 측량 그리드 생성을 자동화 할 수 있습니다.
TIP
자세한 내용은 QGroundControl 사용자 가이드 (opens new window)를 참조하십시오.
# 기체 요 각도 설정
요 각도가 설정된 경우 다중 로터는 목표 경유지에 지정된 방향각 ( MAV_CMD_NAV_WAYPOINT.param4 (opens new window)에 해당)을 향하도록 요잉합니다.
경유지 (param4 = NaN)의 방향각이 명시적으로 설정되지 않은 경우 기체는 매개 변수 MPC_YAW_MODE에 지정된 위치를 향해 요잉합니다. 기본적으로 이것은 다음 경유지입니다.
고정익과 같이 요 및 이동 방향을 제어할 수 없는 기체는 요 설정을 무시합니다.
# 수용 회전 반경 설정
수용 반경은 기체가 웨이포인트에 도달했다고 간주하고 즉시 다음 웨이포인트로 전환 (및 방향 전환 시작)하는 웨이포인트 주변의 원을 정의합니다.
다중 로터의 허용 반경은 매개 변수 NAV_ACC_RAD를 사용하여 조정합니다. 기본적으로 반경은 멀티 로터가 웨이포인트 위로 지나갈 수 있도록 작지만 드론이 웨이포인트에 도달하기 전에 회전을 시작하도록 더 부드러운 경로를 만들기 위해 증가시킬 수 있습니다.
아래 이미지는 다른 수용 반경 매개 변수로 비행한 동일한 임무 비행를 나타냅니다.

회전 속도는 수용 반경 (= 회전 반경)과 최대 허용 가속도 및 저크 (멀티콥터에 대한 저크 제한 유형 궤적 참조)에 따라 자동으로 계산됩니다.
TIP
For more information about the impact of the acceptance radius around the waypoint see: Mission Mode > Inter-waypoint Trajectory.
# 임무 비행
임무가 업로드 되면 비행 보기로 전환합니다. 임무는 진행 상황을 쉽게 추적하도록 표시됩니다. 이보기에서 임무를 수정할 수 없습니다.
