# 멀티콥터 저크 제한 유형 궤적
저크 제한 궤적 유형은 사용자 스틱 입력 또는 미션 변경 (예 : 촬영, 매핑,화물)에 응답하여 부드러운 동작을 제공합니다. 저크와 가속 제한이 항상 보장되는 부드러운 대칭 S-커브를 생성합니다.
이 궤적 유형은 항상 임무 모드에서 활성화됩니다. 위치 모드에서 활성화하려면 매개변수를 설정하십시오 : MPC_POS_MODE = 3.
Note
저크 제한 유형은 위치 모드에서 기본적으로 사용됩니다. 더 빠른 응답이 필요한 기체(예 : 레이서 쿼드)에는 적합하지 않을 수 있습니다.
# 궤적 생성기
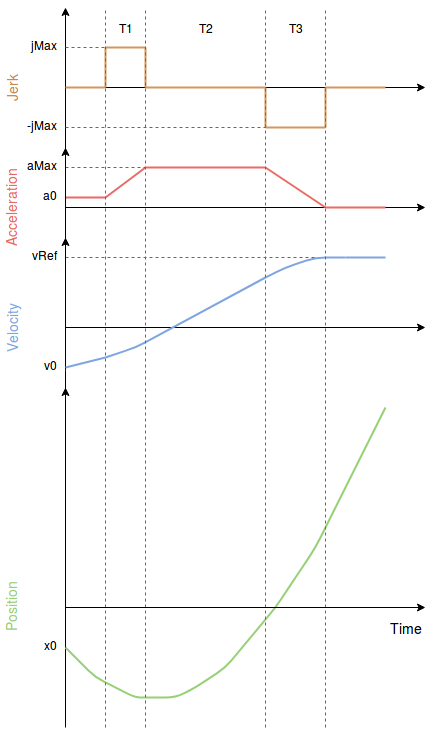
아래의 그래프는 다음과 같은 제약 조건을 가진 일반적인 저크 제한 프로필을 나타냅니다.
jMax: 최대 저크a0: 초기 가속도aMax: 최대 가속도a3: 마지막 가속도 (항상 0)v0: 초기 속도vRef: 목표 속도
제약 조건 jMax, aMax는 매개변수를 통하여 사용자가 설정할 수 있으며, 수동 위치 제어와 자동 모드에서 사용 가능합니다.
결과 속도 프로파일을 "S-Curve"라고 합니다.
# 수동 모드
수동 위치 모드에서 스틱은 전체 스틱 편향이 MPC_VEL_MANUAL에 해당하는 속도로 매핑됩니다.
# 제약 조건
XY 평면
jMax: MPC_JERK_MAXaMax: MPC_ACC_HOR_MAX
Z축
jMax: MPC_JERK_MAXaMax(상향 운동): MPC_ACC_UP_MAXaMax(하향 운동): MPC_ACC_DOWN_MAX
# 자동 모드
자동 모드에서 목표 속도는 MPC_XY_CRUISE이지만, 다음 웨이포인트까지의 거리, 웨이포인트에서 가능한 최대 속도, 원하는 최대 가속도 및 저크에 따라 자동으로 조정됩니다.
# 제약 조건
XY 평면
jMax: MPC_JERK_AUTOaMax: MPC_ACC_HOR
Z축
jMax: MPC_JERK_AUTOaMax(상향 운동): MPC_ACC_UP_MAXaMax(하향 운동): MPC_ACC_DOWN_MAX
웨이 포인트에 근접시 속도 증가 거리 :