# Gazebo Worlds
This topic provides imagery/information about the Gazebo worlds supported by PX4.
The empty.world is spawned by default, though this may be overridden by a model specific world. Developers can also manually specify the world to load: Gazebo Simulation > Loading a Specific World.
The source code for supported worlds can be found on GitHub here: PX4/sitl_gazebo/worlds (opens new window).
# Empty (Default)
PX4/sitl_gazebo/worlds/empty.world (opens new window)
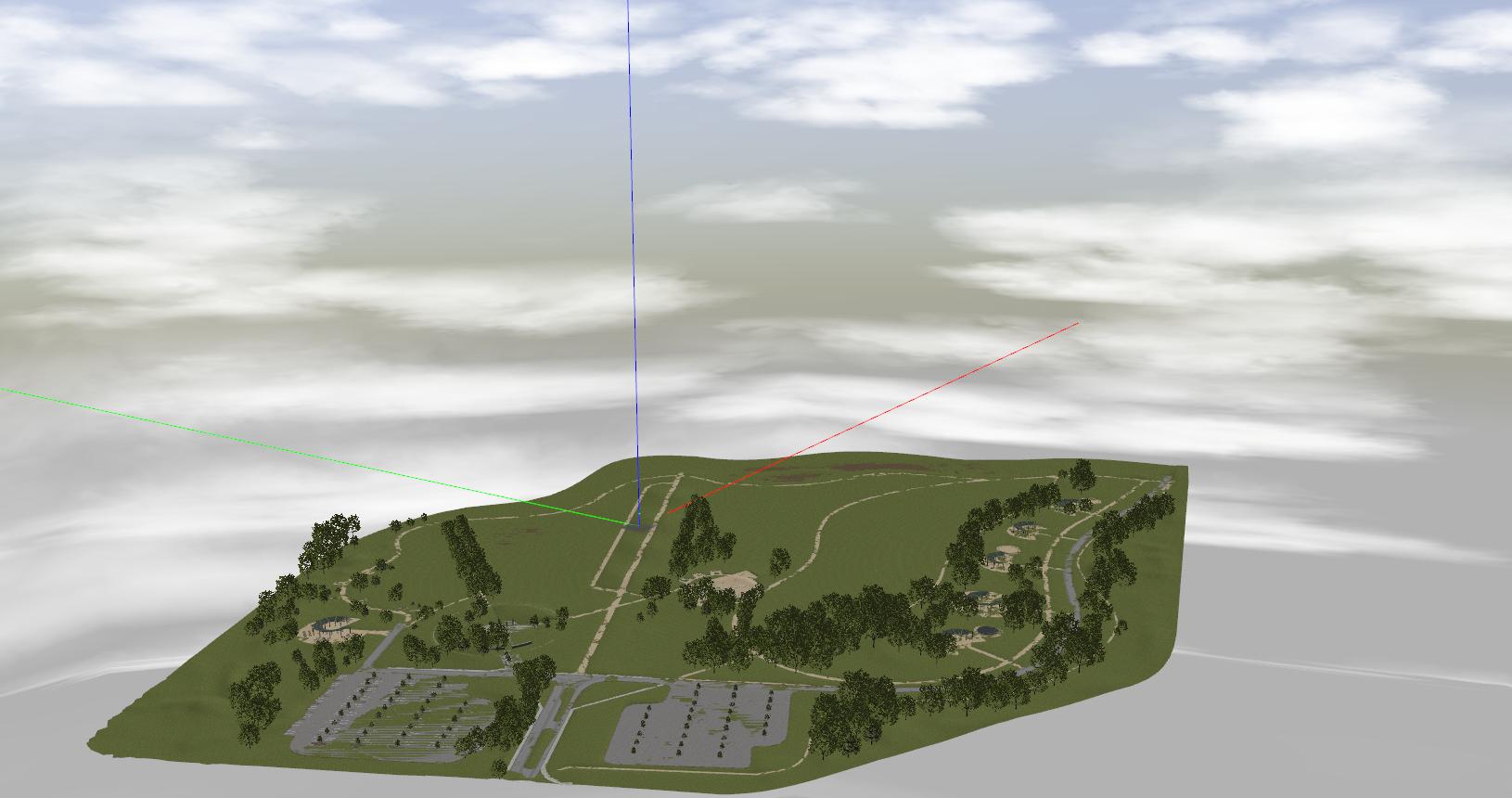
# Baylands
PX4/sitl_gazebo/worlds/baylands.world (opens new window)
# KSQL Airport
PX4/sitl_gazebo/worlds/ksql_airport.world (opens new window)

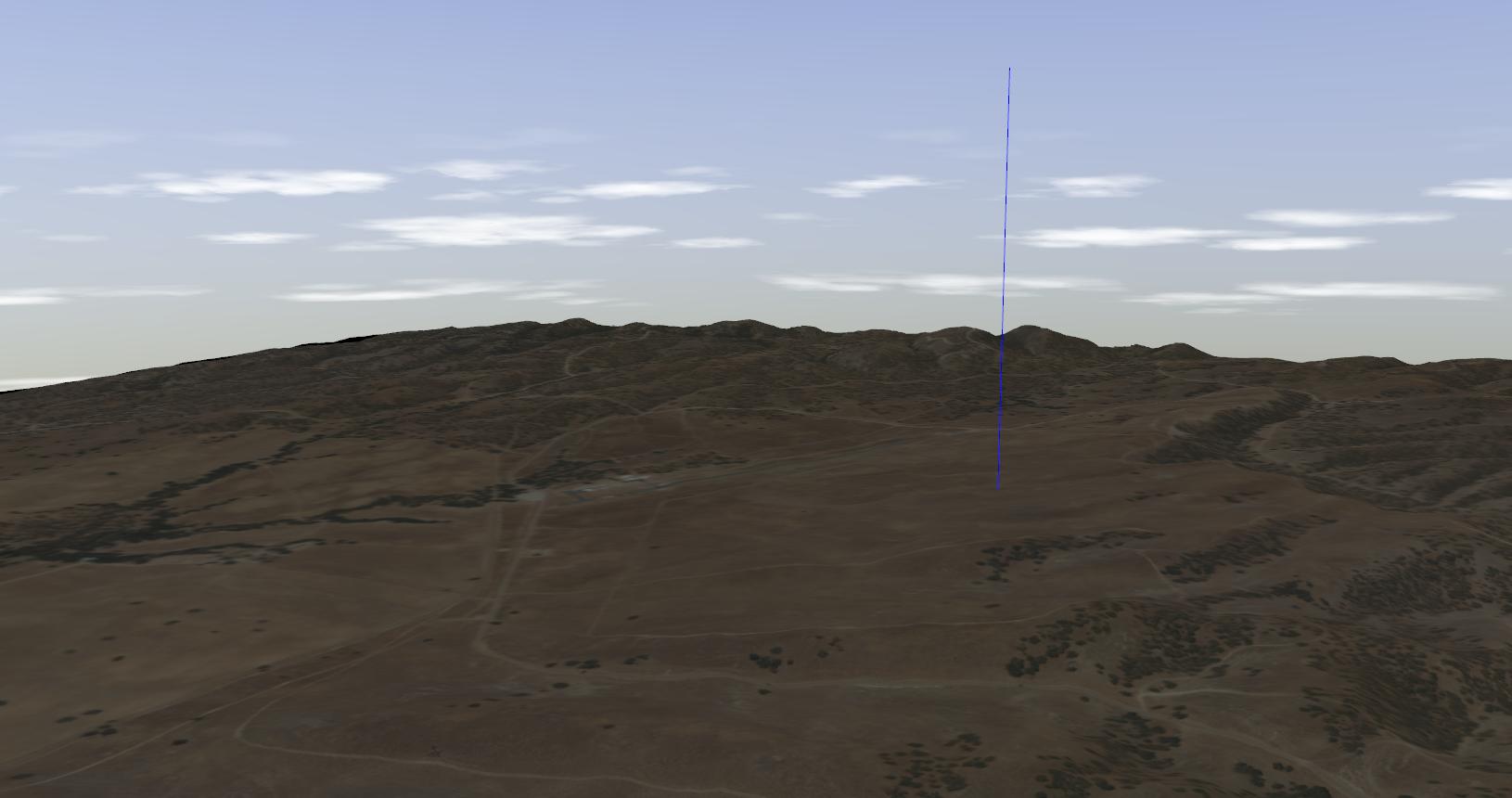
# McMillan Airfield
PX4/sitl_gazebo/worlds/mcmillan_airfield.world (opens new window)
# Sonoma Raceway
PX4/sitl_gazebo/worlds/sonoma_raceway.world (opens new window) 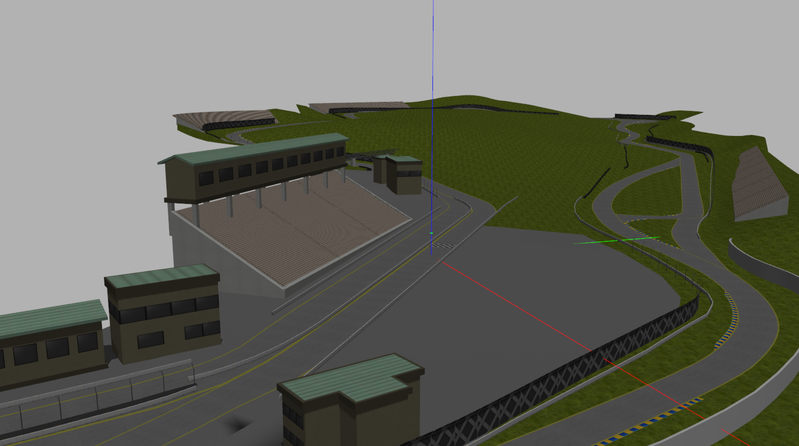
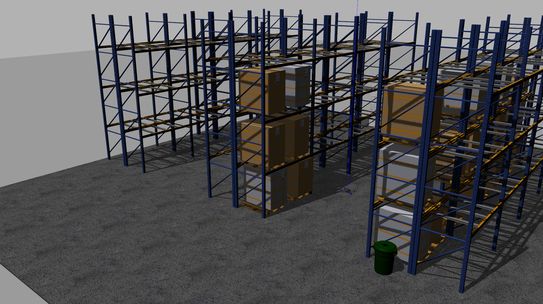
# Warehouse
PX4/sitl_gazebo/worlds/warehouse.world (opens new window)
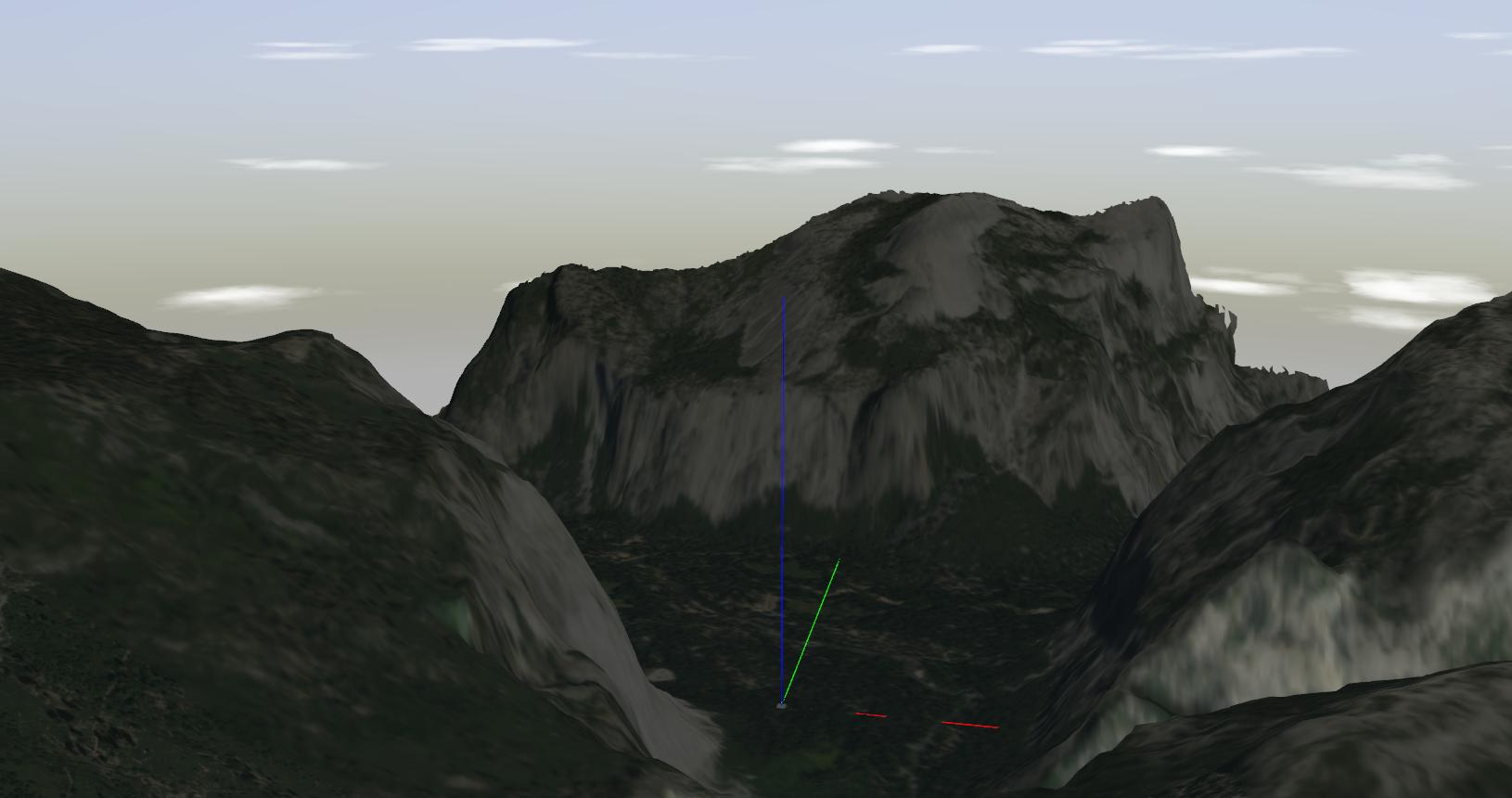
# Yosemite
PX4/sitl_gazebo/worlds/yosemite.world (opens new window)
# Model Specific Worlds
Some vehicle models rely on the physics / plugins of a specific world. The PX4 toolchain will automatically spawn a world that has the same name as the vehicle model if one exists (instead of the default empty.world):
The model specific worlds are:
- boat.world (opens new window): Includes a surface to simulate buoyancy of the boat.
- uuv_hippocampus.world (opens new window): An empty world used to simulate an underwater environment for the HippoCampus UUV.
- typhoon_h480.world (opens new window): Used by Typhoon H480 (Hexrotor) vehicle model and includes a video widget to enable / disable video streaming. The world includes a gazebo plugin for a simulated camera.
- iris_irlock.world (opens new window): Includes a IR beacon for testing precision landing.