# CAUV CAN PMU
CAN PMU® is a high-precision UAVCAN power module developed by CUAV®. It runs the CUAV ITT compensation algorithm, which enables drones to get the battery data more accurately.

It is recommended for use in large commercial vehicles, but might also be used for research vehicles.
# Specifications
- Processor: STM32F412
- Voltage input: 6~62V(2-15S)
- Max current: 110A
- Voltage accuracy: ±0.05V
- Current accuracy: ±0.1A
- Resolution: 0.01A/V
- Max output power: 6000W/90S
- Max stable power: 5000W
- Power port output: 5.4V/5A
- Protocol: UAVCAN
- Operating temp: -20~+100
- Firmware upgrade: Supported.
- Calibration: Not needed.
- Interface Type:
- IN/OUT: XT90(Cable)/Amass 8.0(Module)
- Power port: 5025850670
- CAN: GHR-04V-S
- Appearance:
- Size: 46.5mm * 38.5mm * 22.5mm
- Weight: 76g
# Purchase
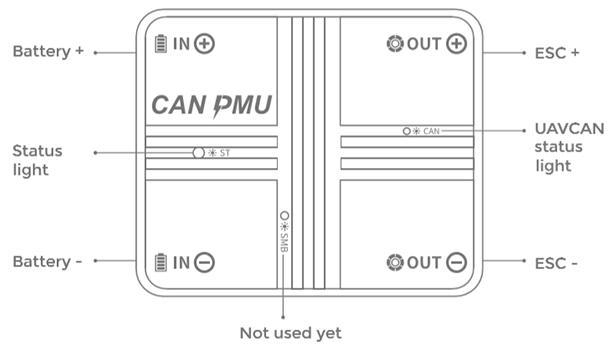
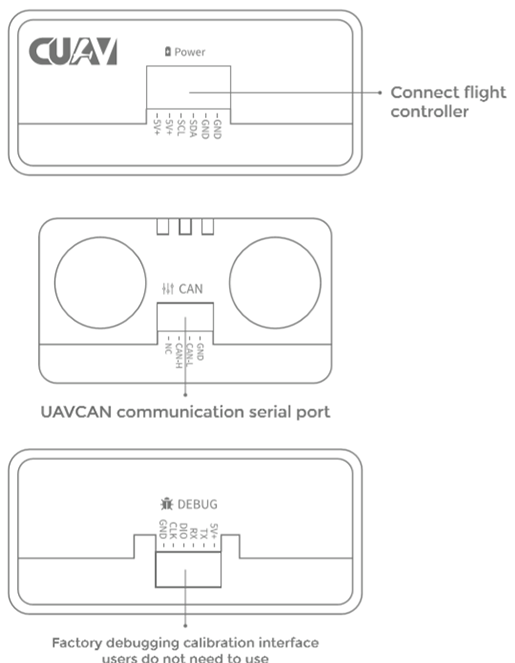
# Pinouts
# Connection
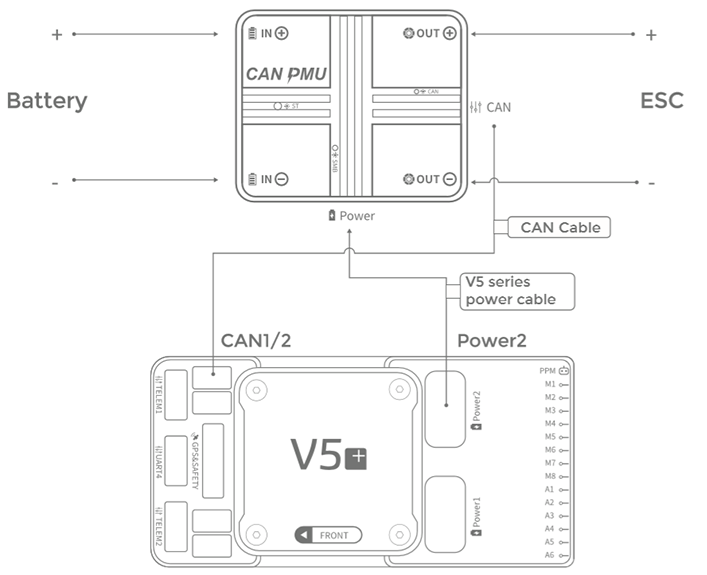
The connection steps are:
- Connect the flight control CAN1/2 and the module CAN interface.
- Connect the V5 series power cable to the V5 Flight Control Power2 (if other flight controllers are connect to the Power interface) and the module Power interface.
# Enable CAN PMU
Set the following parameters in the QGroundControl parameter list and then restart:
UAVCAN_ENABLE: set to: Sensors Automatic Config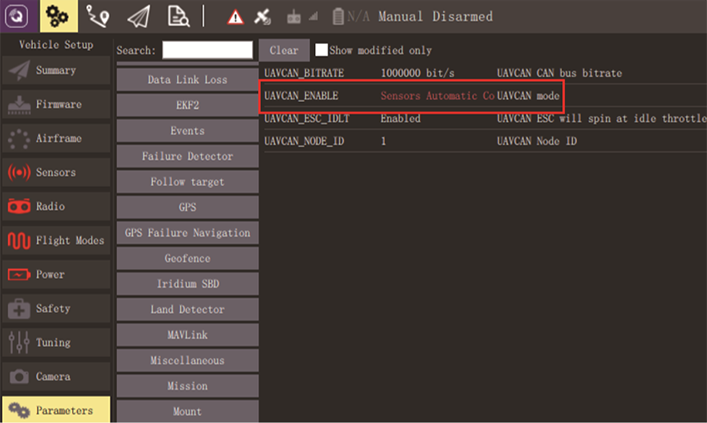
# Package Contents

# Further Information
CAN PMU Manual (opens new window)
CAN PMU Power detection module > Enable CAN PMU > PX4 firmware (opens new window) (CUAV docs)