# 가속도계
PX4를 처음 사용하거나, 비행 콘트롤러의 방향이 변경된 경우에는 가속도계를 보정하여야 합니다. 기존 장비를 계속 사용하는 경우에는 보정 작업이 필요하지 않습니다. 온도가 낮은 겨울철이나, 제조단계에서 별도의 교정을 받지 않은 경우에는 보정하는 것이 좋습니다.
Note
잘못된 가속도계 보정은 사전비행 단계나 시동 거부 메시지로 확인될 수 있습니다. QGroundControl 경고 메시지는 일반적으로 "높은 가속도 값"이나 "일관성 검사 실패"를 의미합니다.
QGroundControl은 차량을 여러 방향으로 배치하고 유지하도록 안내합니다 (위치간에 이동할 때 메시지가 표시됨).
TIP
차량을 회전하지 않고 고정한다는 점외에는 나침반 보정작업과 유사합니다.
Note
The calibration uses a least squares 'fit' algorithm that doesn't require you to have "perfect" 90 degree orientations. 각 축이 보정 단계별로 어느 시점에 대부분 위아래를 가리키고, 차량이 고정되어 있으면 정확한 방향은 중요하지 않습니다.
# 보정 절차
보정 절차는 다음과 같습니다:
QGroundControl에서 기체에 접속합니다.
상단 툴바에서 기어 아이콘 (기체 설정) 을 선택한 다음, 사이드 바에서 센서를 선택합니다.
가속도계 버튼을 클릭합니다.
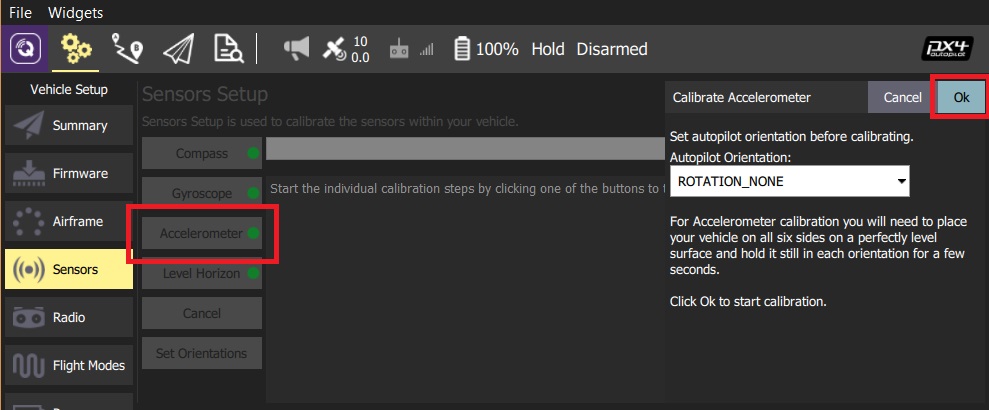
Note
이 작업 이전에 비행 콘트롤러 방향을 미리 설정하여야 합니다. 미리 설정하지 않았다면, 여기에서 설정하십시오.
- 보정을 시작하려면 확인을 클릭하십시오.
- 화면에 표시된 그림과 같이 기체를 배치합니다. 기체를 움직이면 (드론의 방향과 일치하는 이미지가 노란색으로 바뀝니다) 드론을 그 상태로 유지합니다. 현재 방향에 대해 보정이 완료되면, 화면의 그림이 녹색으로 변경됩니다.
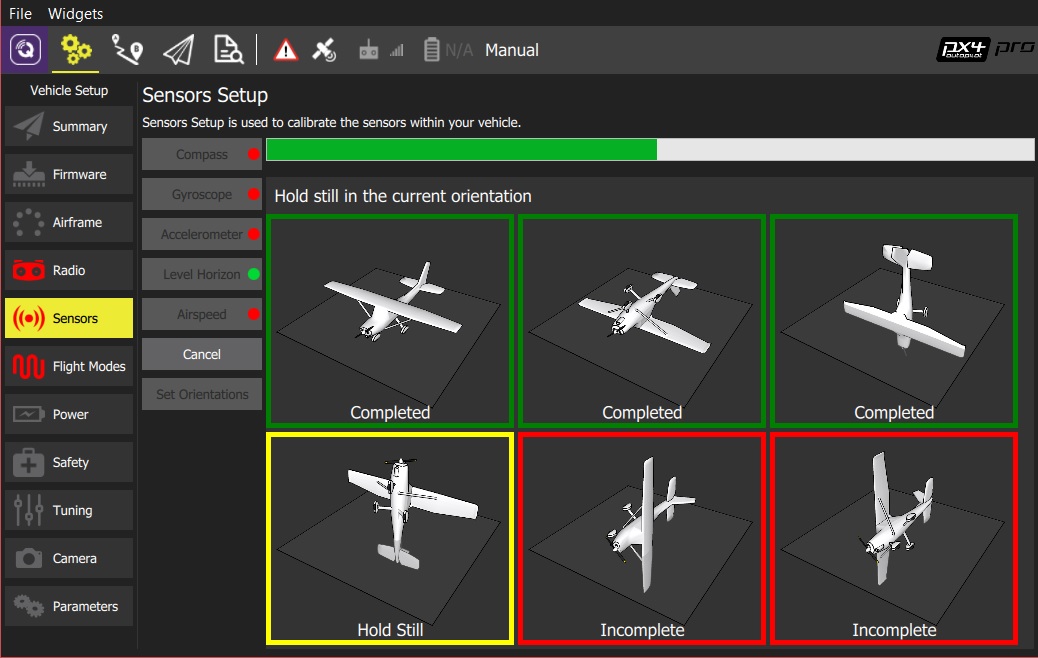
- 기체의 모든 방향에 대해 보정 작업을 반복합니다.
모든 위치에서 기체를 보정하면 *QGroundControl *에서 *보정 완료 * 메시지를 표시합니다. 모든 방향의 그림들이 녹색으로 표시되고 진행 표시 줄이 완전히 채워집니다. 그런 다음 다음 다른 센서의 보정 작업을 진행합니다.