# 아크로 모드 (고정 날개)


곡예 기동을 수행하는 RC 모드 (예 : 롤, 뒤집기, 포장 마차 및 곡예 인물)
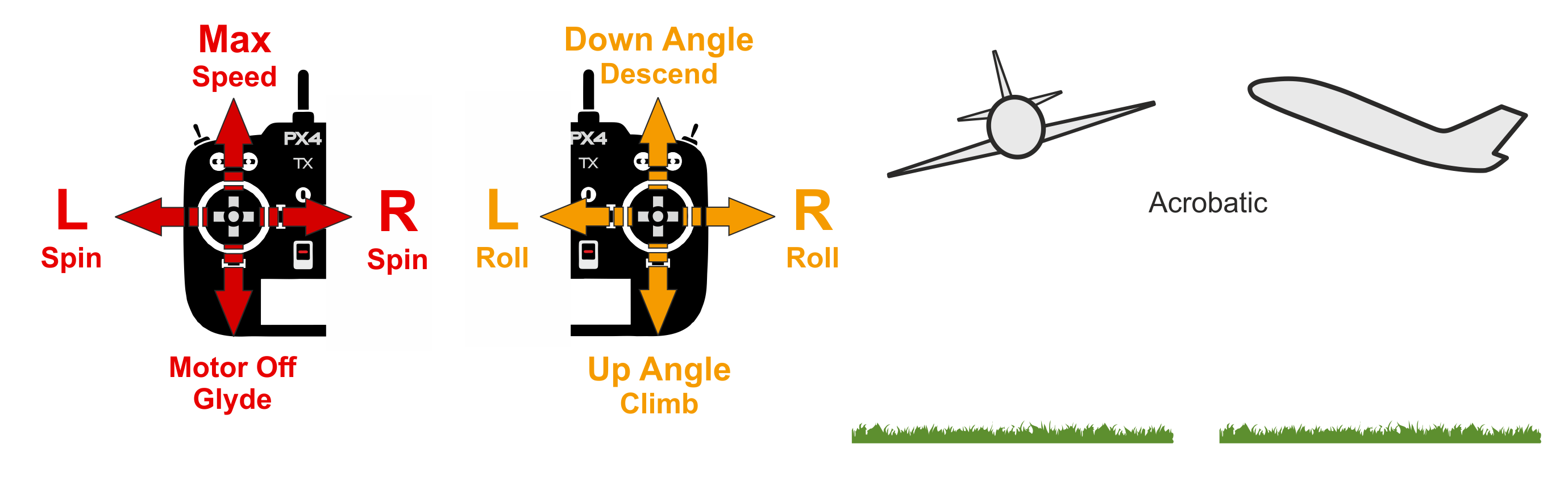
롤, 피치 및 요 스틱은 각 축을 중심으로 한 각도 회전 속도를 제어하고 조절판은 직접 출력 믹서로 전달됩니다. 스틱이 중앙에 놓여지면 기체는 회전을 멈추지만 현재 방향 (측면, 반전 등) 과 현재 모멘텀에 따라 움직입니다.
# 기술적 설명
곡예 기동을 수행하는 RC 모드 (예 : 롤, 뒤집기, 포장 마차 및 곡예 인물)
RPY 스틱 입력은 자동 조종 장치에 의해 안정화되는 각속도 명령으로 변환됩니다. Throttle은 출력 믹서에 직접 전달됩니다.
# 매개 변수
| 매개변수 | 설명 |
|---|---|
| FW_ACRO_X_MAX | 아크로 본체 x 최대 속도 (사용자가 acro 모드에서 전체 롤 스틱 입력을 적용한 경우 컨트롤러가 달성하려고 시도하는 본체 x 속도). 기본값: 90도. |
| FW_ACRO_Y_MAX | Acro body y max rate (사용자가 acro 모드에서 전체 피치 스틱 입력을 적용한 경우 컨트롤러가 달성하려고하는 바디 y 비율). 기본값: 90도. |
| FW_ACRO_Z_MAX | Acro body z 최대 속도 (사용자가 acro 모드에서 전체 요 스틱 입력을 적용한 경우 컨트롤러가 달성하려고 시도하는 몸체 속도). 기본값: 45도. |