# 위치 모드(멀티콥터)


")
위치 모드는 롤링이 가능한 비행하기 쉬운 RC 모드입니다. 피치 스틱은 차량의 좌우 및 전후 방향(자동차의 가속 페달과 유사)의 지면 가속을 제어하고, 스로틀은 상승-하강 속도를 제어합니다. 스틱을 풀거나 중앙에 놓으면 차량이 능동적으로 제동하고 수평을 맞추고 3D 공간의 위치에 고정되어 바람과 기타 힘을 보상합니다. With full stick deflection the vehicle accelerates initially with MPC_ACC_HOR_MAX ramping down until it reaches the final velocity MPC_VEL_MANUAL.
TIP
위치 모드는 새 전단지를위한 가장 안전한 수동 모드입니다. 고도 및 수동 / 안정화 모드와 달리, 차량은 바람의 저항에 의해 감속 될 때까지 계속되는 대신 스틱이 중앙에있을 때 정지합니다. :::
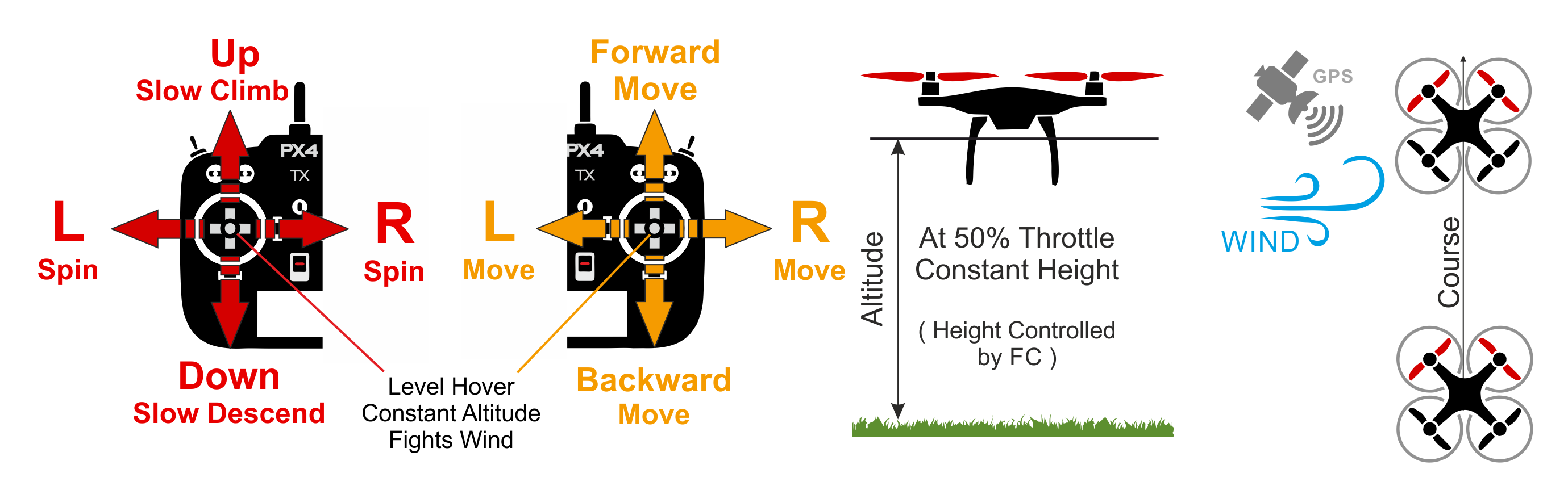
아래 다이어그램은 모드 동작을 시각적으로 보여줍니다 (모드 2 송신기의 경우).
# 착륙
이 모드에서 착륙은 용이합니다.
- 롤 및 피치 스틱을 사용하여 드론을 착륙 지점 위에 수평으로 배치합니다.
- 롤 및 피치 스틱을 놓고 완전히 멈출 때까지 충분한 시간을 둡니다.
- 차량이 지면에 닿을 때까지 스로틀 스틱을 부드럽게 아래로 당깁니다.
- 스로틀 스틱을 끝까지 당기면 지상 감지를 촉진하고 가속화할 수 있습니다.
- 차량은 프로펠러 추력을 낮추고, 지면을 감지하여 자동으로 시동 해제합니다(기본값).
WARNING
잘 보정된 차량에서는 매우 드물지만 때때로 착륙에 문제가 발생할 수 있습니다.
- 차량이 수평으로 움직이지 않는 경우:
- 고도 모드에서 계속 착륙할 수 있습니다. 접근 방식은 롤 및 피치 스틱을 사용하여 차량이 착륙 지점 위에 있는지 수동으로 확인하는 점을 제외하고 위와 동일합니다.
- 착륙 후 GPS와 자력계 방향을 확인하고 보정합니다.
- 차량이 지상/착륙 및 무장 해제를 감지하지 못하는 경우:
- 차량이 지상에 도착한 후 스로틀 스틱을 낮게 유지하면서 수동/안정화 모드로 전환하고 제스처나 다른 명령을 사용하여 수동으로 무장 해제합니다. 또는 차량이 이미 지상에 있을 때 킬 스위치를 사용할 수도 있습니다. :::
# 기술 요약
롤, 피치, 스로틀(RPT) 스틱이 해당 축/방향의 움직임을 제어하는 RC 모드. 중앙에 있는 스틱은 차량을 수평으로 유지하고, 바람에 맞서 고정된 고도와 위치를 유지합니다.
- 중앙 롤, 피치, 스로틀 스틱(RC 데드존 MPC_HOLD_DZ 내)은 바람과 같은 방해 요소에 대해 x, y, z 위치를 안정적으로 유지합니다.
- 센터 외부:
- 롤/피치 스틱은 차량의 좌우 및 전후 방향(각각)으로 지면에서 수평 가속을 제어합니다.
- 스로틀 스틱은 상승 하강 속도를 제어합니다.
- 요 스틱은 수평면 위의 회전 각속도를 제어합니다.
- 이륙:
- 착륙했을 때 스로틀 스틱을 62.5 % (하단에서 전체 범위) 이상으로 올리면 기체가 이륙합니다.
Note
- 수동 입력이 필요합니다 (RC 컨트롤러 또는 MAVLink를 통한 게임 패드/엄지 스틱).
- 이 모드는 GPS가 필요합니다. :::
# 매개변수
Multicopter Position Control 그룹의 모든 매개 변수는 관련이 있습니다. 특정 참고 사항의 몇 가지 매개 변수를 아래에서 설명합니다.
| 매개 변수 | 설명 |
|---|---|
| MPC_HOLD_DZ | 위치 유지가 활성화 된 스틱의 Deadzone입니다. 기본값 : 0.1 (전체 스틱 범위의 10 %). |
| MPC_Z_VEL_MAX_UP | 최대 수직 상승 속도. 기본값: 3 m/s. |
| MPC_Z_VEL_MAX_DN | 최대 수직 하강 속도. 기본값: 1 m/s. |
| MPC_LAND_ALT1 | 느린 착륙의 첫 번째 단계가 동작하는 고도입니다. Below this altitude descending velocity gets limited to a value between MPC_Z_VEL_MAX_DN (or MPC_Z_V_AUTO_DN) and MPC_LAND_SPEED. Value needs to be higher than MPC_LAND_ALT2. Default 10m. |
| MPC_LAND_ALT2 | 느린 착륙의 두 번째 단계를 위한 고도. Below this altitude descending velocity gets limited to MPC_LAND_SPEED. Value needs to be lower than "MPC_LAND_ALT1". 기본값: 5m. |
RCX_DZ | 채널 X의 RC 데드 존. 스로틀에 대한 X 값은 RC_MAP_THROTTLE 값에 따라 달라집니다. 예를 들어, 스로틀이 채널 4 인 경우 RC4_DZ는 데드 존을 지정합니다. |
MPC_XXXX | 대부분의 MPC_xxx 매개 변수는이 모드에서 비행 동작에 어느정도 영향을 미칩니다 . 예를 들어, MPC_THR_HOVER는 기체의 호버링 추력을 정의합니다. |
| MPC_POS_MODE | 움직임 번역 전략에 대한 입력을 고수하십시오. PX4 v1.12부터 기본(4)은 스틱 위치가 가속을 제어하는 것입니다(자동차 가속 페달과 유사한 방식). 다른 옵션을 사용하면 스무딩 및 가속 제한이 있거나 없는 상태에서 스틱 편향이 지면 위의 속도를 직접 제어할 수 있습니다. |
| MPC_ACC_HOR_MAX | 최대 수평 가속도. |
| MPC_VEL_MANUAL | 최대 수평 속도. |
| MPC_LAND_SPEED | Landing descend rate. Default 0.7 m/s. |
# 추가 정보
# 위치 손실 / 안전
위치 모드는 수용 가능한 위치 추정치에 따라 다릅니다. 예를 들어, GPS 손실로 인해 추정치가 허용 수준 이하로 떨어지면 위치(GPS) 손실 안전 장치가 동작할 수 있습니다. 구성, 리모컨 보유 여부와 적절 고도 추정치가 있는지 여부에 따라 PX4는 고도 모드, 수동 모드, 착륙 모드로 전환하거나 종료할 수 있습니다.