# 임무 모드
")
임무 모드는 비행 제어기에 업로드하여 사전 정의된 자율 임무 (비행 계획)을 실행합니다. 임무는 일반적으로 QGroundControl (opens new window) (QGC)과 같은 GCS (Ground Control Station) 애플리케이션으로 생성하여 업로드 됩니다.
Note
- 이 모드에는 3D 위치 정보 (예 : GPS)가 필요합니다.
- 이 모드를 사용하려면 기체의 시동을 걸어야합니다.
- 이 모드는 자동이며, 기체 제어에 사용자 개입이 필요하지 않습니다.
- RC 무선 조종기 스위치는 기체의 비행 모드를 변경할 수 있습니다.
- 멀티콥터와 VTOL 멀티콥터 모드에서 RC 스틱을 움직이면 위험한 배터리 안전 장치를 처리하지 않는 한 기본적으로 기체는 위치 모드로 변경됩니다. :::
# 설명
임무는 일반적으로 지상 관제소(예 : QGroundControl</ 0>)에서 생성되고 발사전에 업로드됩니다. 개발자 API로 생성하거나 비행중에 업로드 할 수 있습니다.
개별 미션 명령은 기체의 비행 특성에 적합한 방식으로 처리됩니다 (예를 들어 loiter는 헬리콥터의 경우 hover로 동작하고, 고정익에는 *circle *로 동작합니다.). VTOL 차량은 고정익모드에서는 고정익, 멀터콥터 모드에서는 헬리콥터의 동작과 매개 변수를 따릅니다.
Note
임무는 자동조종장치를 부팅하기 전에 삽입한 SD 카드에 업로드 됩니다. :::
높은 수준에서 모든 기체 유형은 임무모드가 작동시 동일한 방식으로 작동합니다.
- 임무가 저장되고 PX4가 비행 이면 현재 단계에서 미션/비행 계획을 실행합니다.
- 미션이 저장되고 PX4가 착륙한 경우 :
- 헬리콥터에서 PX4는 미션/비행 계획을 실행합니다. 임무에
이륙명령이 없는 경우 PX4는 현재 단계에서 나머지 비행 계획을 실행하기 전에 기체를 최소 고도로 상승시킵니다. - 고정익 차량에서는 PX4가 자동으로 이륙하지 않습니다 (자동조종장치가 움직임 부족을 감지하고 스로틀을 0으로 설정합니다). 차량은 임누 모드에서 손이나 투석기를 발사하면 임무를 수행을 시작할 수 있습니다.
- 헬리콥터에서 PX4는 미션/비행 계획을 실행합니다. 임무에
- 저장된 임무가 없거나 PX4가 모든 임무 명령 실행을 완료한 경우 :
- 비행하면 기체는 배회합니다.
- 착륙하면 기체는 "대기"합니다.
- QGroundControl에서 선택하여 현재 임무 명령을 수동으로 변경할 수 있습니다.
Note
미션에서 항목으로 이동 명령이있는 경우 다른 항목으로 이동해도 루프 카운터가 재설정되지 않습니다. 이것은 현재 임무 명령을 1로 변경하면 임무를 "완전히 다시 시작" 하지 않는 것입니다. :::
- 임무는 기체의 시동이 꺼지거나 새 임무가 업로드된 경우에만 초기화됩니다.
TIP
기체가 착륙 후 자동으로 시동이 꺼려면 QGroundControl에서 차량 설정 > 안전 (opens new window)에서 착륙 모드 설정한 다음 < 0>이후 해제를 설정하십시오. 착륙 후 시동 꺼기 대기 시간을 입력하십시오. :::
유지 모드를 사용하여 임무를 일시 중지할 수 있습니다. 임무 비행 모드를 다시 활성화하면 미션이 현재 미션 명령에서 계속됩니다. 임누 모드에서 비행하는 동안 미션을 중단하고 다른 모드로 전환하기로 결정한 경우: 위치 모드에서 RC로 기체를 다른 곳으로 비행한 다음 미션 모드로 다시 전환하면 현재 위치에서 미션을 계속하고 아직 방문하지 않은 다음 미션 웨이포인트로 비행합니다.
WARNING
RC 모드로 전환 전에 스로틀 스틱이 0이 아닌지 확인하십시오 (그렇지 않으면 기체가 충돌합니다). 다른 모드로 전환하기 전에 조종 스틱을 중앙에 두는 것이 좋습니다.
임무 계획에 대한 자세한 내용은 다음을 참조하십시오.
- 임무 계획
- 계획보기 (opens new window) (QGroundControl 사용자 가이드)
# QGroundControl 지원
QGroundControl은 추가 GCS 수준의 임무 처리 지원을 제공합니다 (비행 컨트롤러에서 제공하는 것 외에도). 더 자세한 정보는 다음을 참고하세요.
# 임무 매개변수
임무 동작은 여러 매개 변수의 영향을 받습니다. 매개 변수 참조 > 임무에 문서화되어 있습니다. 매우 작은 하위 집합이 아래에 나열되어 있습니다.
| 매개변수 | 설명 |
|---|---|
| NAV_RCL_ACT | RC 손실 안전 모드 (RC 연결이 끊어지면 기체가 수행할 작업) - 예 : 홀드 모드 진입, 복귀 모드, 종료 등 |
| NAV_LOITER_RAD | 고정익 선회 반경 |
| COM_RC_OVERRIDE | 멀티콥터(MC 모드에서는 VTOL)의 스틱 움직임이 위치 모드에서 조종사에게 제어권을 재부여 여부를 제어합니다. 자동 모드와 오프보드 모드에 대해 별도로 활성화할 수 있으며, 기본적으로 자동 모드에서 활성화됩니다. |
| COM_RC_STICK_OV | 위치 모드로 전환하는 스틱 이동량 (COM_RC_OVERRIDE이 활성화된 경우). |
# 지원되는 임무 명령
PX4는 미션 모드에서 다음 MAVLink 미션 명령을 "수락"합니다 (일부 caveats 포함). 달리 명시되지 않는 한 구현은 MAVLink 사양에 정의된 대로입니다.
MAV_CMD_NAV_WAYPOINT (opens new window)
- Param3 (플라이 스루)는 무시됩니다. 플라이 스루는 param 1 (time_inside)> 0 인 경우 항상 활성화됩니다.
MAV_CMD_NAV_VTOL_TAKEOFF (opens new window)
MAV_CMD_NAV_VTOL_TAKEOFF.param2(전환 제목)은 무시됩니다. 대신 다음 웨이포인트로의 방향이 전환 방향으로 사용됩니다.
MAV_CMD_NAV_FENCE_POLYGON_VERTEX_INCLUSION (opens new window)
MAV_CMD_NAV_FENCE_POLYGON_VERTEX_EXCLUSION (opens new window)
Note:
PX4는 위의 메시지를 구문 분석하지만, 반드시 동작 할 필요는 없습니다. 예를 들어, 일부 메시지는 기체 유형에 따라 차이가 있습니다.
PX4는 임무 명령에 대한 로컬 프레임을 지원하지 않습니다 (예 : MAV_FRAME_LOCAL_NED (opens new window)).
모든 메시지와명령이 QGroundControl을 통해 노출되는 것은 아닙니다.
메시지가 추가되면 목록이 최신이 아닐 수 있습니다. 코드를 검사하여 현재 설정을 확인할 수 있습니다. 지원은 /src/modules/mavlink/mavlink_mission.cpp (opens new window)의
MavlinkMissionManager :: parse_mavlink_mission_item입니다.Note
누락되거나 잘못된 메시지를 찾으면 문제 보고서 또는 PR을 추가하십시오. :::
# Rounded turns: Inter-Waypoint Trajectory
PX4는 이전 웨이포인트에서 현재 목표까지 직선을 따라갈 것으로 예상합니다 (웨이포인트 사이에 다른 종류의 경로를 계획하지 않습니다. 필요한 경우 추가 웨이포인트를 추가하여 시뮬레이션 할 수 있습니다).
멀티콥터는 저크 제한 튜닝에 따라 웨이포인트에 접근하거나 이탈할 때 속도를 변경합니다. 기체는 허용 반경 (NAV_ACC_RAD)에 의해 정의한 다음 웨이포인트 (정의된 경우)를 향해 부드러운 곡선으로 비행합니다. 아래의 다이어그램은 예상 가능한 경로들을 나타냅니다.
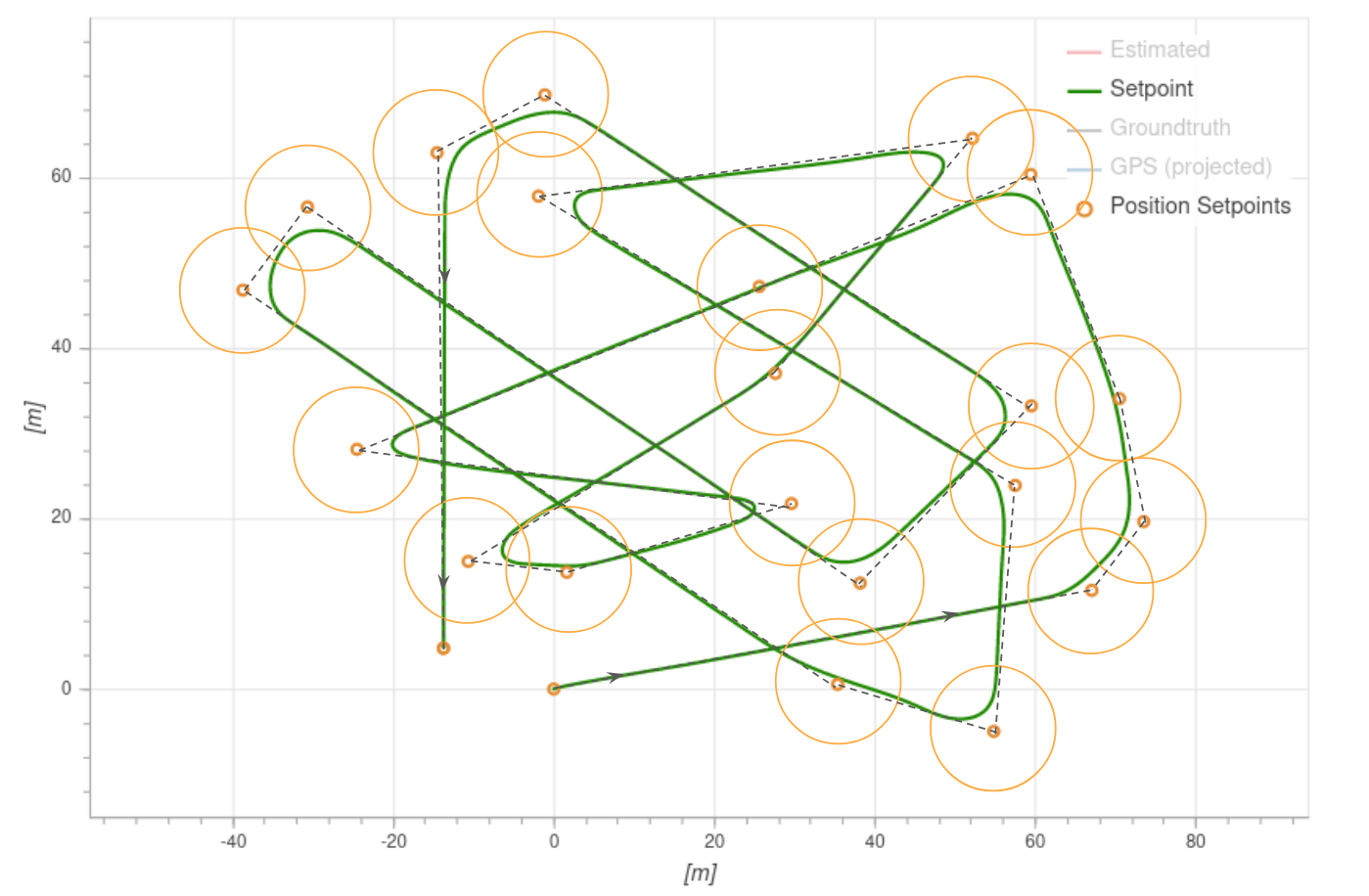
기체는 허용 반경에 들어 오자마자 다음 웨이포인트로 전환합니다.
- 멀티콥터의 경우 이 반경은 NAV_ACC_RAD로 정의됩니다.
- 고정익의 경우 허용 반경은 "L1 거리"로 정의됩니다.
- L1 거리는 FW_L1_DAMPING 및 FW_L1_PERIOD의 두 매개 변수와 현재지면 속도에서 계산됩니다.
- 기본적으로 약 70 미터입니다.
- 방정식: