# 3DR Pixhawk 1 비행 콘트롤러 (단종됨)
WARNING
This flight controller has been discontinued and is no longer commercially available. You can use the mRo Pixhawk as a drop-in replacement.
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for support or compliance issues.
The 3DR Pixhawk® 1 autopilot is a popular general purpose flight controller based on the Pixhawk-project (opens new window) FMUv2 open hardware design (it combines the functionality of the PX4FMU + PX4IO). PX4는 NuttX (opens new window) OS에서 실행됩니다.

PX4 조립 및 설정 방법은 Pixhawk 배선 퀵 스타트를 참고하십시오.
# 주요 특징
- 메인 시스템 온칩: STM32F427 (opens new window)
- CPU : 단정밀도 FPU의 180MHz ARM® Cortexex® M4
- RAM : 256KB SRAM (L1)
- 장애복구 시스템 온칩 : STM32F100
- CPU: 24 MHz ARM Cortex M3
- RAM : 8KB SRAM
- Wifi: ESP8266 외장형
- GPS: u-blox® 7/8 (Hobbyking®) / u-blox 6 (3D Robotics)
- 광류 센서: PX4 Flow unit
- 중복 전원공급장치 및 자동 장애 조치
- 외부 안전 스위치
- 다색 LED 주시각 표시기
- 고전력 멀티톤 피에조 오디오 표시기
- 장기간 고속 로깅용 microSD 카드
연결성
- I2C 1개
- CAN 1개 (2개는 옵션)
- ADC 1개
- UART 4개 (흐름 제어 2개 포함)
- 콘솔 1개
- 수동 오버라이드 기능이 있는 PWM 8개
- 6개 PWM / GPIO / PWM 입력
- S.BUS / PPM / Spektrum 입력
- S.BUS 출력
# 구매처
원래 3DR®에서 제조하였습니다. 이 보드는 PX4®의 최초 표준 마이크로 콘트롤러 플랫폼이었습니다. 보드가 더 이상 3DR에서 제조되지는 않지만, mRo Pixhawk을 대용품으로 사용할 수 있습니다.
mRo Pixhawk 주문:
- 베어본 (Bare Bones) (opens new window) - 보드만(3DR Pixhawk 대체품으로 유용합니다)
- mRo Pixhawk 2.4.6 필수 키트 (opens new window) - 텔레메트리 무선 통신을 제외한 모든 것
- mRo Pixhawk 2.4.6 쿨 키트 (한정판)</0> - 텔레메트리 라디오를 포함하여 필요한 모든 것
# 사양
# 프로세서
- 32 비트 STM32F427 Cortex-M4F (opens new window) 코어 (FPU 포함)
- 168 MHz
- 256 KB RAM
- 2 MB Flash
- 32 비트 STM32F103 장애복구 코프로세서
# 센서
- ST Micro L3GD20H 3축 16비트 자이로스코프
- ST 마이크로 LSM303D 14 비트 가속도계/자력계
- Invensense MPU 6000 3축 가속도계/자이로스코프
- MEAS MS5611 기압계
# 인터페이스
- UART (직렬 포트) 5개, 1 개의 고전력 지원, 2x (HW 흐름 제어 포함)
- CAN 2개(하나는 내부 3.3V 트랜시버, 하나는 확장 커넥터에 있음)
- Spektrum DSM/DSM2/DSM-X® Satellite 호환 입력
- Futaba S.BUS® 호환 입출력
- PPM 합계 신호 입력
- RSSI(PWM 또는 전압) 입력
- I2C
- SPI
- 3.3 및 6.6V ADC 입력
- 내부 microUSB 포트 및 외부 microUSB 포트 확장
# 전력 시스템 및 보호
- 자동복구 기능의 이상적인 다이오드 컨트롤러
- 서보 레일 고출력 (최대 10V) 및 고전류 (10A +) 준비
- 모든 주변 장치 출력 과전류 보호, 모든 입력 ESD 보호
# 정격 전압
Pixhawk 는 3 개의 전원이 공급되는 경우에는 전원 공급 장치의 3중 중복이 가능합니다. 세 개의 레일은 전원 모듈 입력, 서보 레일 입력과 USB 입력입니다.
# 정상 작동 최대 등급
이러한 조건에서 전원은 아래의 순서대로 시스템에 전원을 공급하여야 합니다.
- 전원 모듈 입력 (4.8V ~ 5.4V)
- 서보 레일 입력 (4.8V ~ 5.4V) 수동 오버라이드의 경우 최대 10V이지만 전력 모듈 입력이 없는 경우 자동 조종 장치 부품은 5.7V 이상에서 전원이 꺼집니다.
- USB 전원 입력 (4.8V ~ 5.4V)
# 절대 최대 정격 전압
아래의 조건에서 시스템은 전원을 사용하지 않지만(작동하지 않음), 그대로 유지됩니다.
- 전원 모듈 입력(4.1V ~ 5.7V, 0V ~ 20V 손상되지 않음)
- 서보 레일 입력(4.1V ~ 5.7V, 0V ~ 20V)
- USB 전원 입력(4.1V ~ 5.7V, 0V ~ 6V)
# 회로도
FMUv2 + IOv2 회로도 (opens new window) - 회로도 및 레이아웃
CC-BY-SA 3.0 라이센스 오픈 하드웨어 설계로 모든 회로도와 설계 파일을 [사용할 수 있습니다](https://github.com/PX4/Hardware).
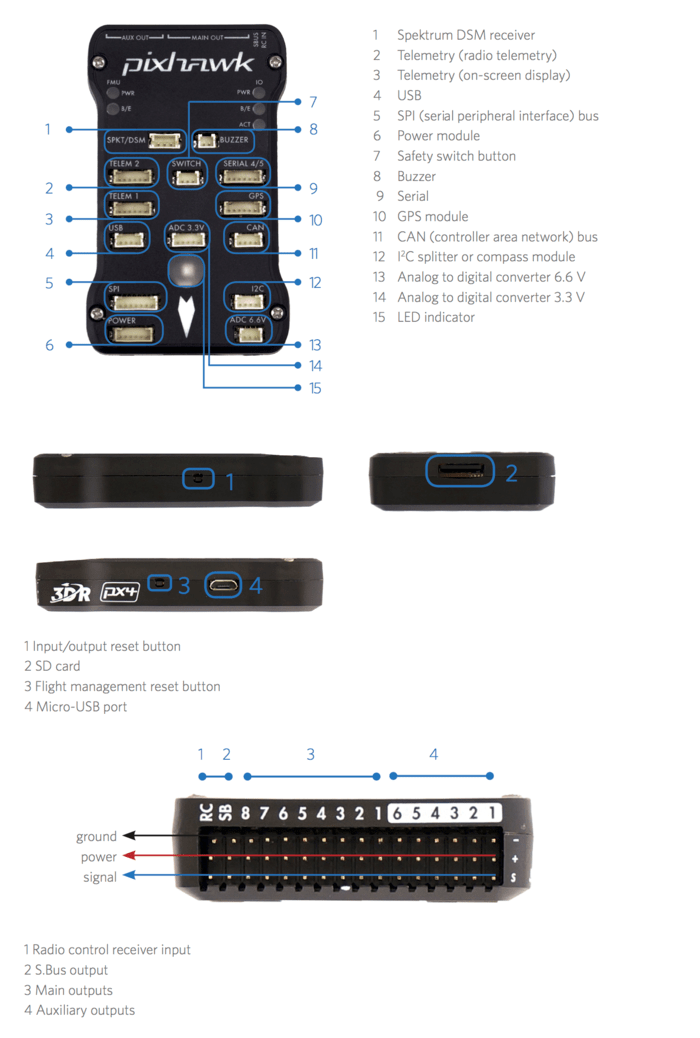
# Connections
Pixhawk ports are shown below. These use Hirose DF13 connectors (predating the JST-GH connectors defined in the Pixhawk connector standard).
WARNING
Many 3DR Pixhawk clones use Molex picoblade connectors instead of DF13 connectors. They have rectangular instead of square pins, and cannot be assumed to be compatible.
TIP
The RC IN port is for RC receivers only and provides sufficient power for that purpose. 서보, 전원 공급 장치 또는 배터리를 여기 또는 연결된 수신기에 절대 연결하지 마십시오.
:::
# 핀배열
# TELEM1, TELEM2 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | CTS (입력) | +3.3V |
| 5 (흑) | RTS (출력) | +3.3V |
| 6 (흑) | GND | GND |
# GPS 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | CAN2 TX | +3.3V |
| 5 (흑) | CAN2 RX | +3.3V |
| 6 (흑) | GND | GND |
# SERIAL 4/5 포트
공간 제약으로 인하여 두 개의 포트가 하나의 커넥터에 있습니다.
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (#4) | +3.3V |
| 3 (흑) | RX (#4) | +3.3V |
| 4 (흑) | TX (#5) | +3.3V |
| 5 (흑) | RX (#5) | +3.3V |
| 6 (흑) | GND | GND |
# ADC 6.6V
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | ADC 입력 | 최대 +6.6V |
| 3 (흑) | GND | GND |
# ADC 3.3V
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | ADC 입력 | 최대 +3.3V |
| 3 (흑) | GND | GND |
| 4 (흑) | ADC 입력 | 최대 +3.3V |
| 5 (흑) | GND | GND |
# I2C
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | SCL | +3.3 (풀업) |
| 3 (흑) | SDA | +3.3 (풀업) |
| 4 (흑) | GND | GND |
# CAN
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | CAN_H | +12V |
| 3 (흑) | CAN_L | +12V |
| 4 (흑) | GND | GND |
# SPI
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | SPI_EXT_SCK | +3.3 |
| 3 (흑) | SPI_EXT_MISO | +3.3 |
| 4 (흑) | SPI_EXT_MOSI | +3.3 |
| 5 (흑) | !SPI_EXT_NSS | +3.3 |
| 6 (흑) | !GPIO_EXT | +3.3 |
| 7 (흑) | GND | GND |
# 전원
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | VCC | +5V |
| 3 (흑) | CURRENT | +3.3V |
| 4 (흑) | VOLTAGE | +3.3V |
| 5 (흑) | GND | GND |
| 6 (흑) | GND | GND |
# 스위치
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +3.3V |
| 2 (흑) | !IO_LED_SAFETY | GND |
| 3 (흑) | SAFETY | GND |
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | IO 디버그 |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | ||
| UART7 | 콘솔 | |
| UART8 | SERIAL4 |
# 디버그 포트
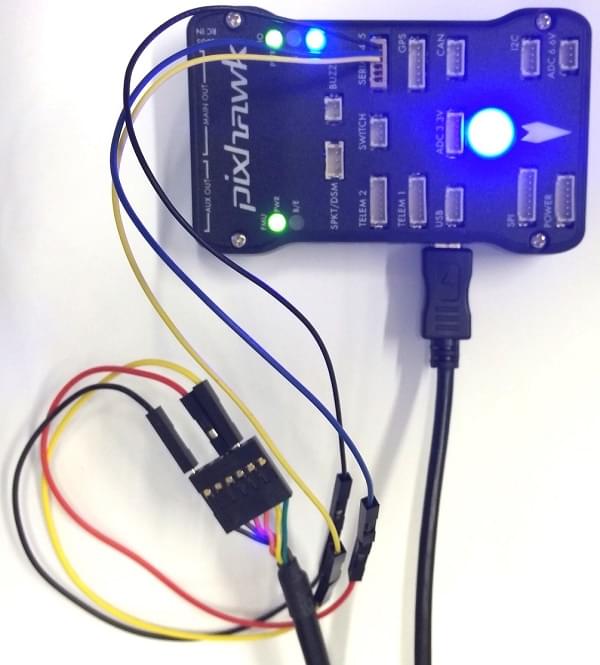
# 콘솔 포트
PX4 시스템 콘솔은 SERIAL4/5로 표시된 포트에서 실행됩니다.
TIP
콘솔에 연결하는 편리한 방법은 여러 다른 Pixhawk 장치와 함께 사용할 수있는 커넥터와 함께 제공되는 Dronecode 프로브 (opens new window)를 사용하는 것입니다. Dronecode 프로브 (opens new window)의 6핀 DF13 1 : 1 케이블을 Pixhawk SERIAL4/5 포트에 연결만하면 됩니다.

The pinout is standard serial pinout, designed to connect to a 3.3V FTDI (opens new window) cable (5V tolerant).
| 3DR Pixhawk 1 | FTDI | |
|---|---|---|
| 1 | +5V (적) | |
| 2 | S4 Tx | |
| 3 | S4 Rx | |
| 4 | S5 Tx | 5 |
| 5 | S5 Rx | 4 |
| 6 | GND | 1 |
6 핀 DF13 1 : 1 커넥터에 대한 FTDI 케이블의 배선은 아래 그림과 같습니다.

전체 배선은 아래와 같습니다.
Note
For information on how to use the console see: System Console.
# SWD 포트
SWD (JTAG) 포트는 덮개 아래에 숨겨져 있습니다(하드웨어 디버깅을 위해 제거해야 함). 아래에 강조 표시된 것처럼 FMU와 IO를 위한 별도의 포트가 존재합니다.
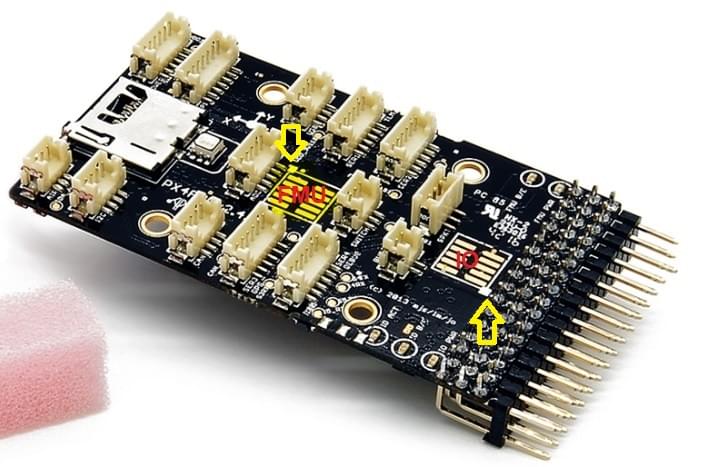
포트는 ARM 10핀 JTAG 커넥터이므로 납땜이 필요합니다. 포트의 핀배열은 아래와 같습니다(위 모서리의 사각형 마커는 핀 1을 나타냄).

Note
모든 Pixhawk FMUv2 보드에는 유사한 SWD 포트가 있습니다.
# 펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. It is pre-built and automatically installed by _QGroundControl_ when appropriate hardware is connected.
:::
이 대상에 대한 PX4 빌드 방법 :
make px4_fmu-v2_default
# 부품 / 하우징
- ARM MINI JTAG (J6): 1.27 mm 10pos header (SHROUDED), for Black Magic Probe: FCI 20021521-00010D4LF (Distrelec (opens new window), Digi-Key (opens new window),) or Samtec FTSH-105-01-F-DV-K (untested) or Harwin M50-3600542 (Digikey (opens new window) or Mouser (opens new window))
- JTAG 어댑터 옵션 #1: BlackMagic Probe (opens new window). 케이블 없이 제공될 수 있습니다 (제조업체에 확인). If so, you will need the Samtec FFSD-05-D-06.00-01-N cable (Samtec sample service (opens new window) or Digi-Key Link: SAM8218-ND (opens new window)) or Tag Connect Ribbon (opens new window) and a Mini-USB cable.
- JTAG Adapter Option #2: Digi-Key Link: ST-LINK/V2 (opens new window) / ST USER MANUAL (opens new window), needs an ARM Mini JTAG to 20pos adapter: Digi-Key Link: 726-1193-ND (opens new window)
- JTAG Adapter Option #3: SparkFun Link: Olimex ARM-TINY (opens new window) or any other OpenOCD-compatible ARM Cortex JTAG adapter, needs an ARM Mini JTAG to 20pos adapter: Digi-Key Link: 726-1193-ND (opens new window)
- USARTs: Hirose DF13 6 pos (Digi-Key Link: DF13A-6P-1.25H(20) (opens new window))
- Mates: Hirose DF13 6 pos housing (Digi-Key Link: Hirose DF13-6S-1.25C (opens new window))
- I2C and CAN: Hirose DF13 4 pos (Digi-Key Link: DF13A-4P-1.25H(20) (opens new window) - discontinued)
# 지원 플랫폼 및 기체
일반 RC 서보 또는 Futaba S-Bus 서보로 제어 가능한 모든 멀티콥터/비행기/로버 또는 보트.