# CUAV v5 (단종)
WARNING
This flight controller has been discontinued and is no longer commercially available.
PX4 does not manufacture this (or any) autopilot. Contact the [manufacturer](https://store.cuav.net/) for hardware support or compliance issues.
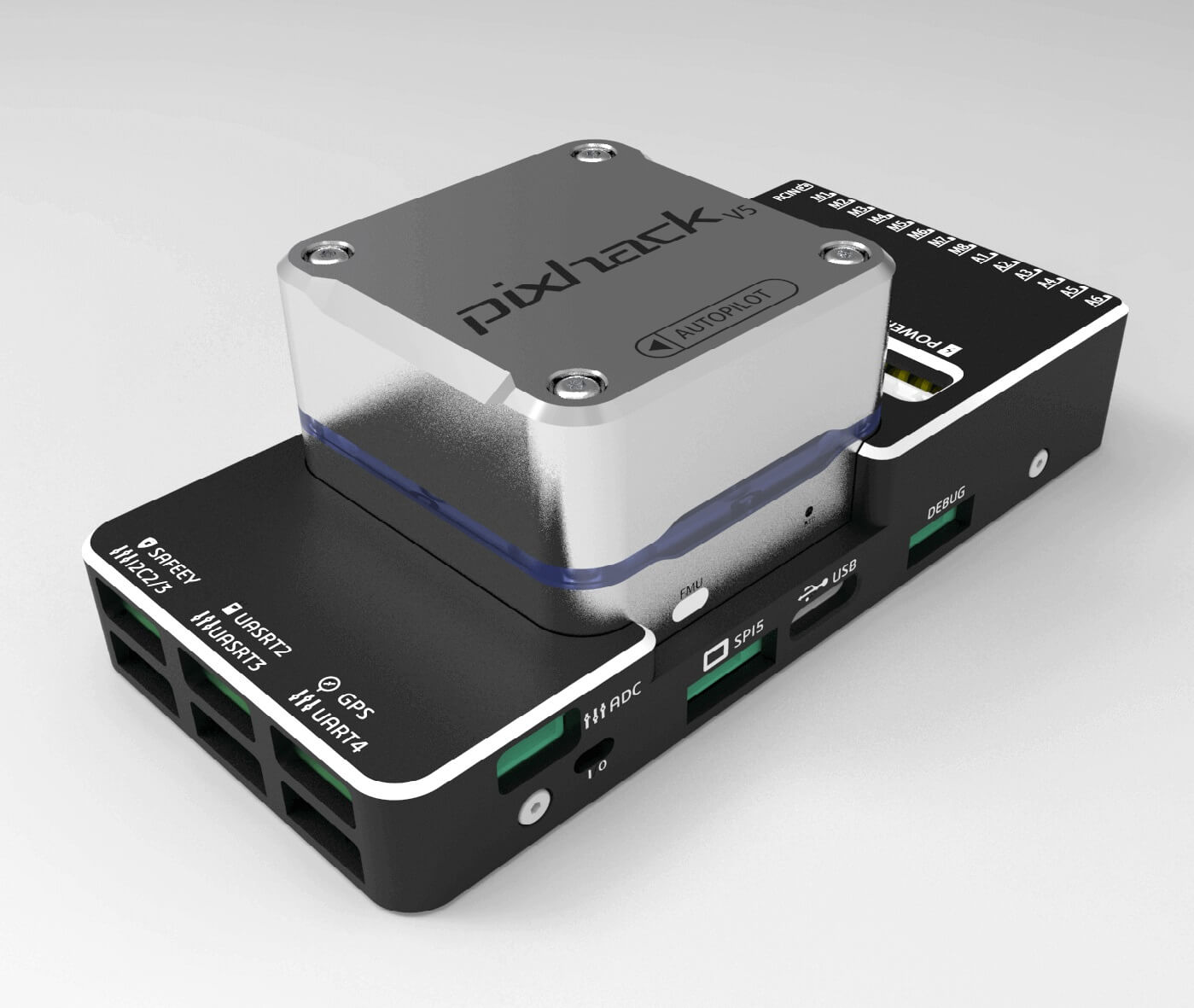
CUAV v5® (previously "Pixhack v5") is an advanced autopilot designed and made by CUAV®. 이 보드는 Pixhawk 프로젝트 (opens new window) FMUv5 개방형 하드웨어 설계에 기반합니다. NuttX (opens new window) OS에서 PX4를 실행하며, PX4 펌웨어와 호환됩니다. 주로 학술 및 상업 개발자를 대상으로합니다.
# 요약
메인 FMU 프로세서: STM32F765
- 32 비트 Arm® Cortex®-M7, 216MHz, 2MB 메모리, 512KB RAM
IO 프로세서: STM32F100
- 32 비트 Arm® Cortex®-M3, 24MHz, 8KB SRAM
내장 센서 :
- 가속도계/자이로스코프 : ICM-20689
- 가속도계/자이로스코프 : BMI055
- 자력계 : IST8310
- 기압계: MS5611
인터페이스:
- PWM 출력 8-14개(IO 6개, FMU 8개)
- FMU의 전용 PWM/캡처 입력 3 개
- CPPM 전용 RC 입력
- PPM 및 S.Bus 전용 RC 입력
- 아날로그/PWM RSSI 입력
- PWM Servo 출력
- 범용 시리얼 포트 5개
- I2C 포트 4개
- SPI 버스 4개
- 2 CANBuses with serial ESC
- 배터리 2 개의 전압 및 전류에 대한 아날로그 입력
전원 시스템 :
- 전원: 4.3~5.4V
- USB 입력: 4.75~5.25V
- 서보 전원 입력: 0~36V
중량 및 크기:
- 중량: 90g
- 크기: 44x84x12mm
기타 특징:
- 작동 온도: -20 ~ 80°c (측정치)
# Where to Buy
CUAV (opens new window)에서 주문하십시오.
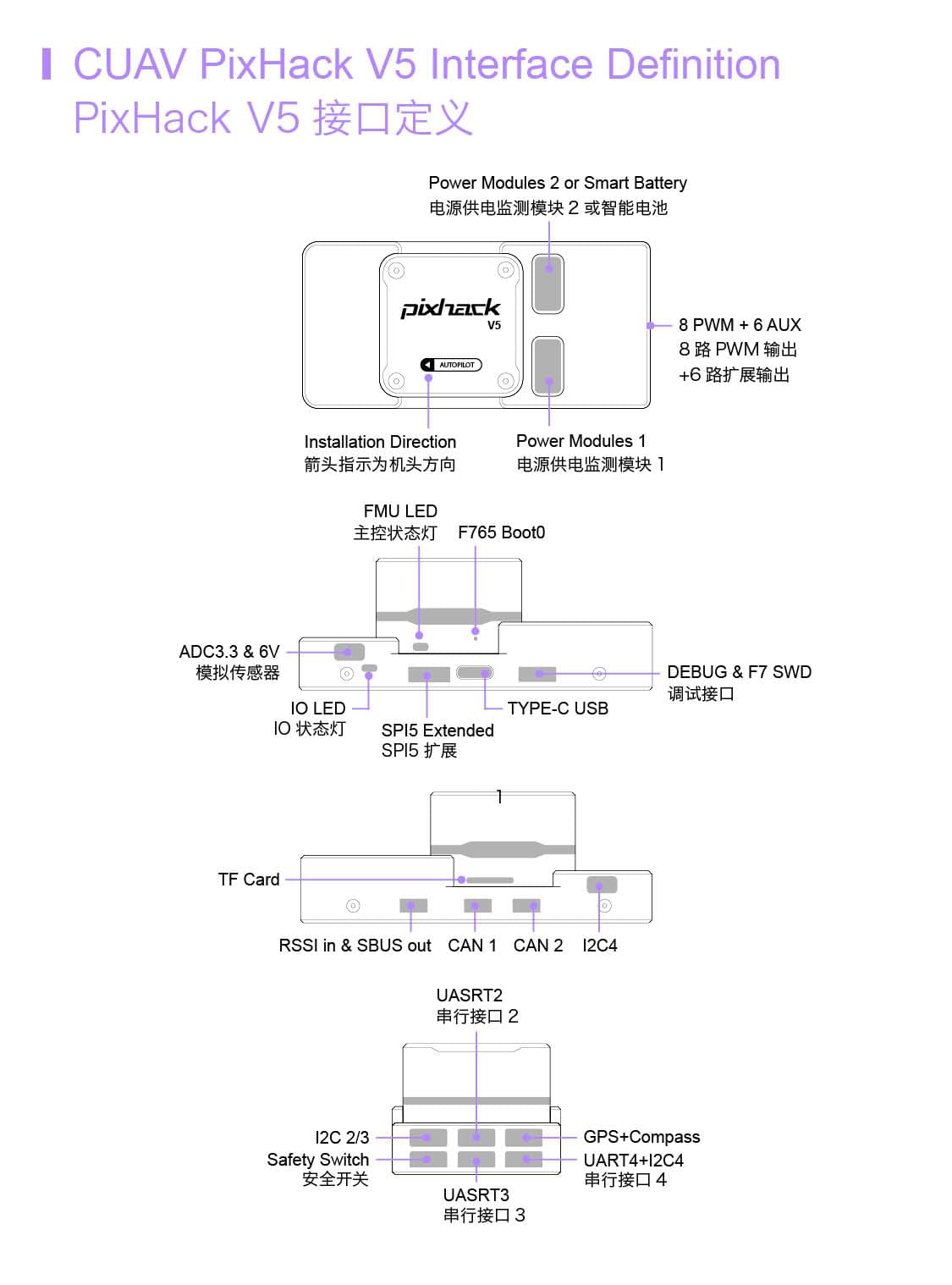
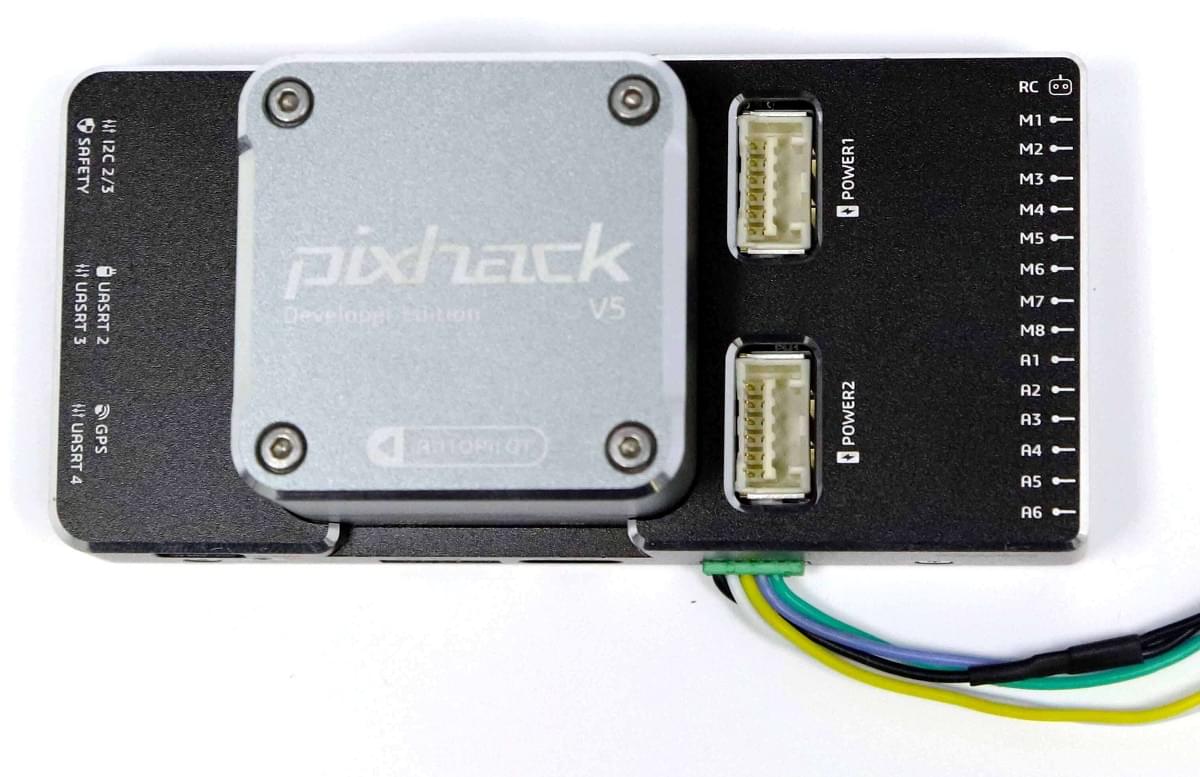
# 연결
WARNING
RCIN 포트는 RC 수신기의 전원 공급으로 제한되며, 전원에 연결할 수 없습니다.
# 정격 전압
CUAV v5 can be triple-redundant on the power supply if three power sources are supplied. 이 세개의 파워 레일은: POWER1, POWER2 그리고 USB 입니다.
Note
출력 전원 레일인 FMU PWM OUT과 I/O PWM OUT (0V to 36V) 은 비행제어보드에 전원을 공급하지 않습니다.(공급받지도 않습니다). POWER1, POWER2 또는 USB중 하나에서 전원을 공급하여야 합니다.
정상 작동 최대 정격 전압
이러한 조건에서 전원은 아래의 순서대로 시스템에 전원을 공급하여야 합니다.
- POWER1과 POWER2 입력 (4.3V ~ 5.4V)
- USB 입력 (4.75V ~ 5.25V)
# 펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. It is pre-built and automatically installed by _QGroundControl_ when appropriate hardware is connected.
:::
이 대상에 대한 PX4 빌드 방법 :
make px4_fmu-v5_default
# 디버그 포트
PX4 시스템 콘솔과 SWD 인터페이스는 FMU 디버그 포트에서 동작합니다. FTDI 케이블을 디버그나 F7 SWD 커넥터에 연결하면 됩니다. I/O 디버그 포트에 액세스하려면 사용자는 CUAV v5 셸을 제거하여야 합니다. 두 포트 모두 표준 직렬 핀이 있으며, 표준 FTDI 케이블 (3.3V, 5V 허용)에 연결할 수 있습니다.
핀배열은 그림과 같습니다.
| 핀 | CUAV v5 디버그 |
|---|---|
| 1 | GND |
| 2 | FMU-SWCLK |
| 3 | FMU-SWDIO |
| 4 | UART7_RX |
| 5 | UART7_TX |
| 6 | VCC |
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX는 SBUS_RC 커넥터의 RC 입력입니다. |
| UART7 | /dev/ttyS5 | 디버깅 콘솔 |
| UART8 | /dev/ttyS6 | PX4IO |
# 주변 장치
# 지원 플랫폼 및 기체
일반 RC 서보 또는 Futaba S-Bus 서보로 제어 가능한 모든 멀티콥터/비행기/로버 또는 보트. 지원되는 운송체의 설정은 기체 정의서를 참고하십시오.