# PX4 소프트웨어 빌드
PX4는 시뮬레이션 대상과 하드웨어 대상을 콘솔이나 IDE에서 구축할 수 있습니다.
Note
이 지침을 따르기 전에 먼저 호스트 운영 체제와 대상 하드웨어에 대한 개발자 도구 모음을 설치하여야 합니다. 이 저장소를 Github 계정과 연결된 복사본을 만들어 (opens new window), 이 원본을 로컬 컴퓨터에 복제 (opens new window)하는 것이 좋습니다.
TIP
일반적인 빌드 문제에 대한 해결 방법은 아래 문제 해결을 참고하십시오.
# PX4 소스 코드 다운로드
PX4 소스 코드는 Github의 PX4/PX4-Autopilot (opens new window) 저장소에 저장되어 있습니다.
To get the very latest ("main") version onto your computer, enter the following command into a terminal:
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
Note
이것이 최신 코드를 빌드하기 위해 필요합니다. If needed you can also get the source code specific to a particular release. GIT Examples provides a lot more information working with releases and contributing to PX4.
# 최초 빌드 (jMAVSim 시뮬레이션 활용)
먼저 콘솔 환경에서 시뮬레이션 대상을 빌드합니다. 이를 통하여 실제 하드웨어와 IDE로 사용전에 시스템 설정을 검증할 수 있습니다.
PX4-Autopilot 디렉토리로 이동하여, 다음 명령을 사용하여 jMAVSim을 시작합니다.
make px4_sitl jmavsim
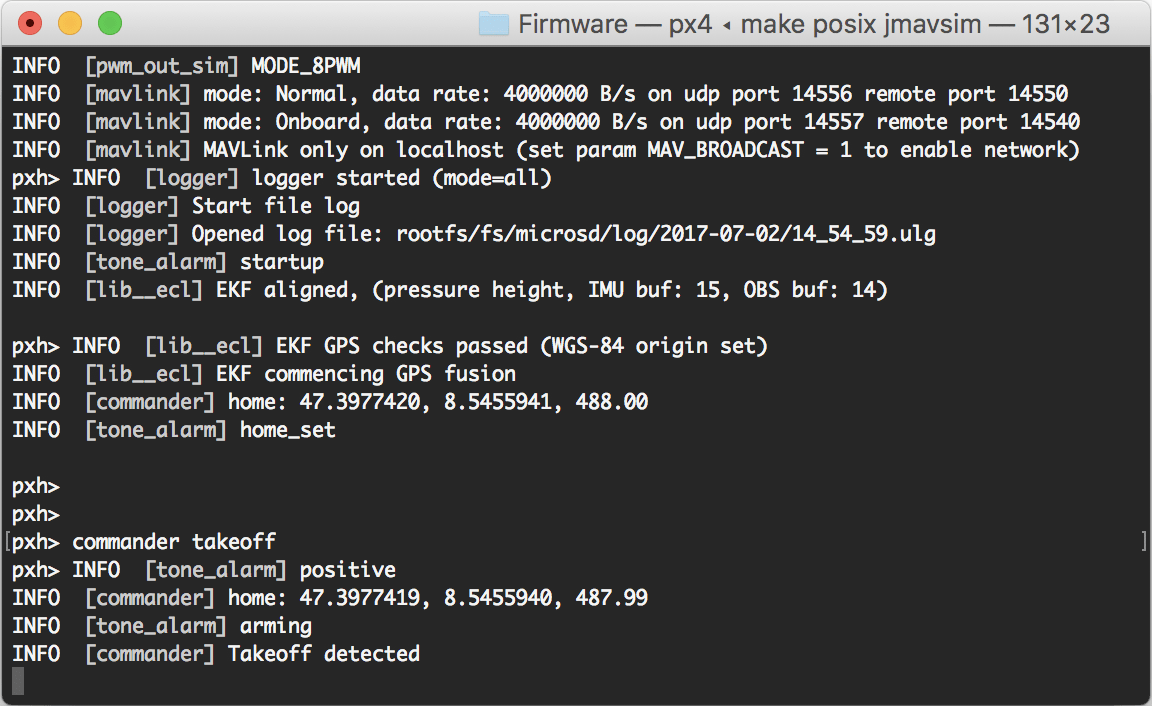
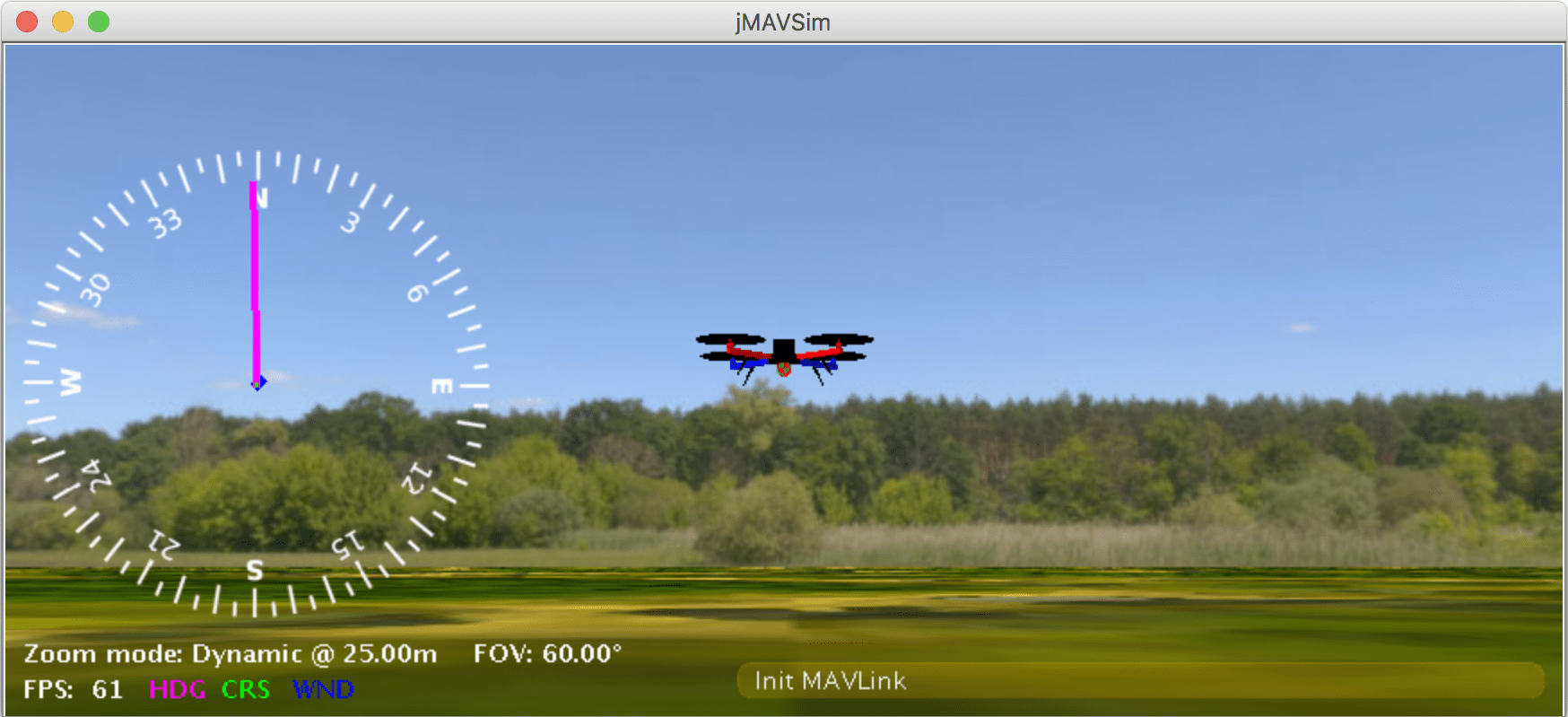
그러면, 아래와 같은 PX4 콘솔이 나타납니다.
Note
You may need to start QGroundControl before proceeding, as the default PX4 configuration requires a ground control connection before takeoff. This can be downloaded from here (opens new window).
The drone can be flown by typing:
pxh> commander takeoff
The drone can be landed by typing commander land and the whole simulation can be stopped by doing CTRL+C (or by entering shutdown).
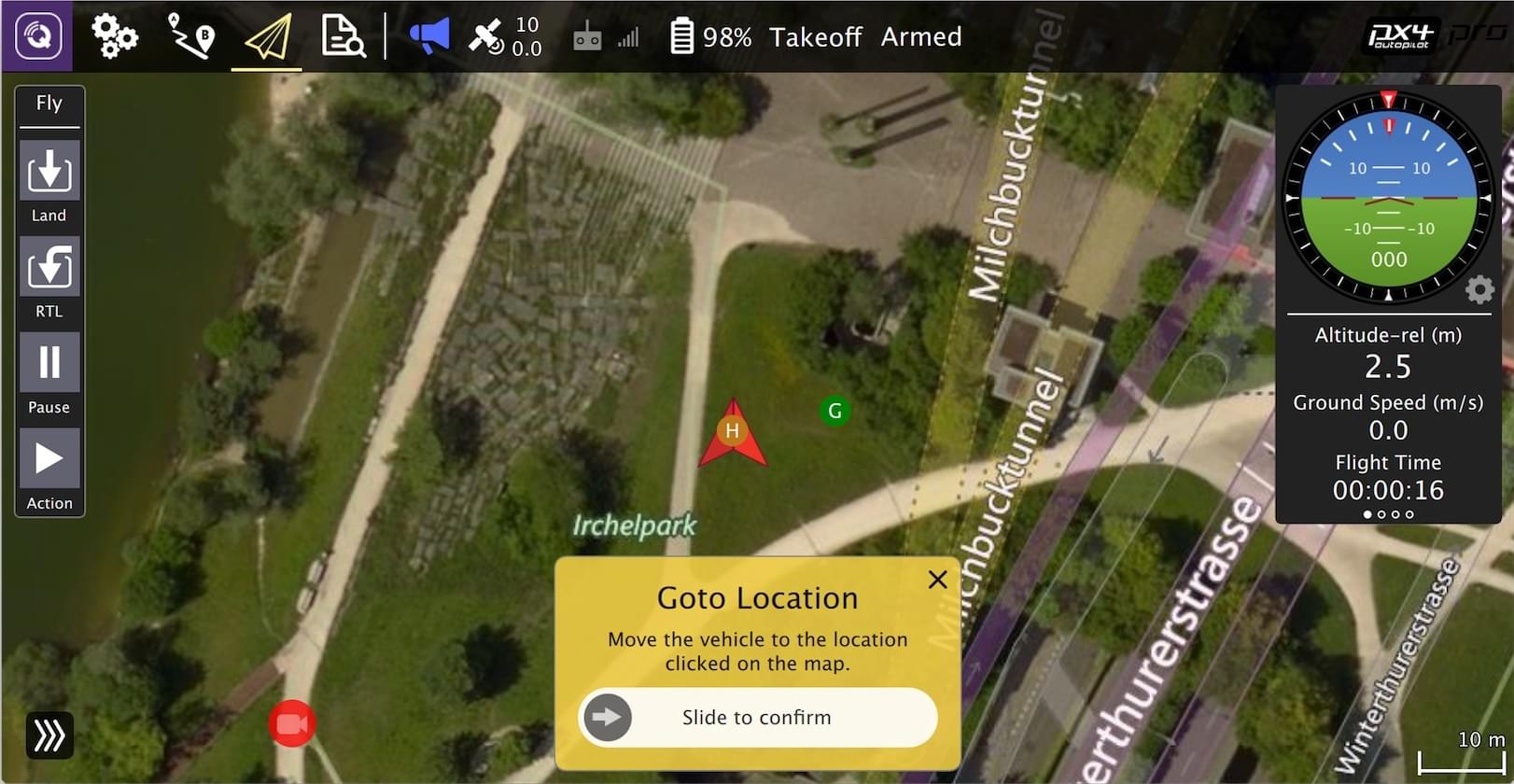
Flying the simulation with the ground control station is closer to the real operation of the vehicle. Click on a location in the map while the vehicle is flying (takeoff flight mode) and enable the slider. This will reposition the vehicle.
PX4 can be used with a number of other [Simulators](../simulation/README.md), including [Gazebo](../sim_gazebo_gz/README.md), [Gazebo Classic](../sim_gazebo_classic/README.md) and [AirSim](../simulation/airsim.md). These are also started with *make* - e.g.
make px4_sitl gazebo-classic
NuttX 또는 Pixhawk 기반 보드용으로 빌드하려면, PX4-Autopilot 디렉토리로 이동한 다음 보드용 빌드 타겟으로 make를 호출하십시오.
# NuttX/Pixhawk 기반 보드
# NuttX용 빌드
예를 들어, Pixhawk 4 하드웨어용으로 빌드하려면 다음 명령을 사용할 수 있습니다.
성공적인 실행은 다음과 유사한 출력으로 종료됩니다.
cd PX4-Autopilot
make px4_fmu-v4_default
A successful run will end with similar output to:
-- 빌드 파일은 /home/youruser/src/PX4-Autopilot/build/px4_fmu-v4_default에 작성되었습니다.
[954/954] Creating /home/youruser/src/PX4-Autopilot/build/px4_fmu-v4_default/px4_fmu-v4_default.px4
The first part of the build target px4_fmu-v4 indicates the target flight controller hardware for the firmware. The suffix, in this case _default, indicates a firmware configuration, such as supporting or omitting particular features.
Note
The _default suffix is optional. For example, make px4_fmu-v5 and px4_fmu-v5_default result in the same firmware. 이 저장소를 Github 계정과 연결된 복사본을 만들어 (opens new window), 이 원본을 로컬 컴퓨터에 복제 (opens new window)하는 것이 좋습니다.
The following list shows the build commands for the Pixhawk standard boards:
- Holybro Pixhawk 6X (FMUv6X):
make px4_fmu-v6x_default - Holybro Pixhawk 6C (FMUv6C):
make px4_fmu-v6c_default - Holybro Pixhawk 6C Mini (FMUv6C):
make px4_fmu-v6c_default - Holybro Pix32 v6 (FMUv6C):
make px4_fmu-v6c_default - Holybro Pixhawk 5X (FMUv5X):
make px4_fmu-v5x_default - Pixhawk 4 (FMUv5):
make px4_fmu-v5_default - Pixhawk 4 Mini (FMUv5):
make px4_fmu-v5_default - CUAV V5+ (FMUv5):
make px4_fmu-v5_default - CUAV V5 nano (FMUv5):
make px4_fmu-v5_default - Pixracer (FMUv4):
make px4_fmu-v4_default - Pixhawk 3 Pro:
make px4_fmu-v4pro_default - Pixhawk Mini:
make px4_fmu-v3_default - Pixhawk 2 (Cube Black) (FMUv3):
make px4_fmu-v3_default - mRo Pixhawk (FMUv3):
make px4_fmu-v3_default(supports 2MB Flash) - Holybro pix32 (FMUv2):
make px4_fmu-v2_default - Pixfalcon (FMUv2):
make px4_fmu-v2_default - Dropix (FMUv2):
make px4_fmu-v2_default - Pixhawk 1 (FMUv2):
make px4_fmu-v2_default
WARNING
You must use a supported version of GCC to build this board (e.g. the same as used by CI/docker) or remove modules from the build. PX4가 보드의 1MB 플래시 제한에 가깝기 때문에, 지원되지 않는 GCC로 빌드가 실패할 수 있습니다. 이 저장소를 Github 계정과 연결된 복사본을 만들어 (opens new window), 이 원본을 로컬 컴퓨터에 복제 (opens new window)하는 것이 좋습니다.
- 2MB 플래시가 있는 Pixhawk 1:
make px4_fmu-v3_default
Build commands for non-Pixhawk NuttX fight controllers (and for all other-boards) are provided in the documentation for the individual flight controller boards.
# 펌웨어 업로드 (보드 플래싱)
Append upload to the make commands to upload the compiled binary to the autopilot hardware via USB. For example
make px4_fmu-v4_default upload
다른 보드에 대한 빌드 명령어 정보는 보드별 비행 콘트롤러 페이지에서 제공됩니다(일반적으로 펌웨어 빌드 제목 아래).
Erase : [====================] 100.0%
Program: [====================] 100.0%
Verify : [====================] 100.0%
Rebooting.
[100%] Built target upload
# 기타 보드
다음 명령어는 모든 빌드 대상을 나열합니다.
You can also list all configuration targets using the command:
make list_config_targets
# 그래픽 IDE에서의 컴파일
많은 빌드 문제는 일치하지 않는 하위 모듈이나 불완전하게 정리된 빌드 환경으로 인하여 발생합니다. 하위 모듈을 업데이트하고 distclean을 수행하면 이 오류를 수정할 수 있습니다:
# 문제 해결
# 일반 빌드 오류
XXXX바이트로 오버플로된 영역 '플래시' 오류는 펌웨어가 대상 하드웨어 플랫폼에 비해 너무 크다는 것을 나타냅니다. 이는 플래시 크기가 1MB로 제한되는 make px4_fmu-v2_default 빌드에서 나타납니다.
git submodule update --recursive
make distclean
# Flash overflowed by XXX bytes
vanilla 마스터 브랜치를 구축하는 경우, 가장 큰 원인은 지원되지 않는 GCC 버전을 사용하기 때문입니다. 이 경우, 개발자 도구 모음 지침에 지정된 버전을 설치하십시오.
자체 브랜치를 구축하는 경우, 펌웨어 크기를 1MB 제한 이상으로 늘렸을 수 있습니다. 이 경우 빌드에서 필요하지 않은 드라이버 모듈을 제거하여야 합니다.
MacOS는 실행 중인 모든 프로세스에서 기본적으로 최대 256개의 열린 파일을 허용합니다. PX4 빌드 시스템은 많은 수의 파일을 오픈하므로, 이 갯수를 초과할 수 있습니다.
# macOS: 열린 파일이 너무 많음 오류
MacOS allows a default maximum of 256 open files in all running processes. The PX4 build system opens a large number of files, so you may exceed this number.
The build toolchain will then report Too many open files for many files, as shown below:
/usr/local/Cellar/gcc-arm-none-eabi/20171218/bin/../lib/gcc/arm-none-eabi/7.2.1/../../../../arm-none-eabi/bin/ld: cannot find NuttX/nuttx/fs/libfs.a: Too many open files
macOS Catalina 10.15.1부터 cmake로 시뮬레이터를 빌드시 문제가 발생할 수 있습니다. 이 플랫폼에서 빌드 문제가 발생하면, 터미널에서 다음 명령을 실행하십시오:
- Tools/mac_set_ulimit.sh (opens new window) 스크립트를 실행하거나,
- 다음 명령어를 실행하십시오.
ulimit -S -n 300
# macOS Catalina: cmake 실행 문제
arm_none_eabi_gcc와 관련된 빌드 문제는 손상된 g++ 도구 모음 설치로 인한 것일 수 있습니다. 다음을 사용하여 누락된 종속성을 확인하여 이러한 경우인지 확인할 수 있습니다.
xcode-select --install
sudo ln -s /Library/Developer/CommandLineTools/SDKs/MacOSX.sdk/usr/include/* /usr/local/include/
# Ubuntu 18.04: arm_none_eabi_gcc와 관련된 컴파일 오류
Build issues related to arm_none_eabi_gccmay be due to a broken g++ toolchain installation. You can verify that this is the case by checking for missing dependencies using:
arm-none-eabi-gcc --version
arm-none-eabi-g++ --version
arm-none-eabi-gdb --version
arm-none-eabi-size --version
이 문제는 컴파일러를 제거하고 다시 설치 (opens new window)하여 해결할 수 있습니다.
arm-none-eabi-gdb --version
arm-none-eabi-gdb: command not found
Visual Studio Code IDE(VSCode) > 문제 해결을 참고하십시오.
# Ubuntu 18.04: Visual Studio Code는 이 큰 작업 영역에서 파일 변경 사항을 감시할 수 없습니다.
make px4_sitl jmavsim 명령을 실행시, "가져오기 실패" 오류는 일부 Python 패키지가 설치되지 않았음을 나타냅니다(예상된 위치).
# Python 패키지를 가져오지 못했습니다.
이러한 종속성을 이미 설치했다면 컴퓨터에 두 개 이상의 Python 버전이 있고(예: Python 2.7.16 Python 3.8.3) 빌드 툴체인에서 사용하는 버전에 모듈이 없는 문제일 수 있습니다.
Failed to import jinja2: No module named 'jinja2'
You may need to install it using:
pip3 install --user jinja2
다음과 같이 종속성을 명시적으로 설치하여, 이 문제를 해결할 수 있습니다.
You should be able to fix this by explicitly installing the dependencies as shown:
pip3 install --user pyserial empty toml numpy pandas jinja2 pyyaml pyros-genmsg packaging
# PX4 빌드 타겟 만들기
The previous sections showed how you can call make to build a number of different targets, start simulators, use IDEs etc. This section shows how make options are constructed and how to find the available choices.
VENDOR_MODEL_VARIANT: (CONFIGURATION_TARGET이라고도 함)
make [VENDOR_][MODEL][_VARIANT] [VIEWER_MODEL_DEBUGGER_WORLD]
VENDOR_MODEL_VARIANT: (also known as CONFIGURATION_TARGET)
- 공급업체: 보드 제조업체:
px4,aerotenna,airmind,atlflight,auav,beaglebone,intel,nxp등 Pixhawk 시리즈 보드의 공급업체 이름은px4입니다. - 모델: 보드 모델 "모델":
sitl,fmu-v2,fmu-v3< /2>, <code>fmu-v4,fmu-v5,navio2등 - VARIANT: Indicates particular configurations: e.g.
bootloader,cyphal, which contain components that are not present in thedefaultconfiguration. 가장 일반적으로 이것은기본값이며 생략 가능합니다.
TIP
You can get a list of all available CONFIGURATION_TARGET options using the command below:
make list_config_targets
VIEWER_MODEL_DEBUGGER_WORLD:
- VIEWER: This is the simulator ("viewer") to launch and connect:
gz,gazebo,jmavsim,none
TIP
none can be used if you want to launch PX4 and wait for a simulator (jmavsim, Gazebo, Gazebo Classic, or some other simulator). 예를 들어, make px4_sitl none_iris는 시뮬레이터 없이(그러나 홍채 기체가 있는) PX4를 시작합니다. 이 저장소를 Github 계정과 연결된 복사본을 만들어 (opens new window), 이 원본을 로컬 컴퓨터에 복제 (opens new window)하는 것이 좋습니다.
- 모델: 사용할 기체 모델(예:
iris(기본),rover,tailsitter등), 시뮬레이터에 의해 로드됩니다. 환경 변수PX4_SIM_MODEL은 선택한 모델로 설정되며, 이 모델은 시작 스크립트에서 적절한 매개변수 선택합니다. - 디버거: 사용할 디버거:
없음(기본),ide,gdb,lldb,ddd,valgrind,callgrind. 자세한 내용은 시뮬레이션 디버깅을 참고하십시오. - WORLD: (Gazebo Classic only). Set the world (PX4-Autopilot/Tools/simulation/gazebo/sitl_gazebo/worlds (opens new window)) that is loaded. Default is empty.world (opens new window). For more information see Gazebo Classic > Loading a Specific World.
TIP
You can get a list of all available VIEWER_MODEL_DEBUGGER_WORLD options using the command below:
make px4_sitl list_vmd_make_targets
Notes:
Notes:
CONFIGURATION_TARGET과VIEWER_MODEL_DEBUGGER에 있는 대부분의 값에는 기본값이 있으므로 선택사항입니다. For example,gazebo-classicis equivalent togazebo-classic_irisorgazebo-classic_iris_none.- 두 개의 다른 설정 사이에 기본값을 지정하려는 경우에는, 세 개의 밑줄을 사용할 수 있습니다. For example,
gazebo-classic___gdbis equivalent togazebo-classic_iris_gdb. VIEWER_MODEL_DEBUGGER에없음값을 사용하여 PX4를 시작하고 시뮬레이터를 실행할 수 있습니다. For example start PX4 usingmake px4_sitl_default noneand jMAVSim using./Tools/simulation/jmavsim/jmavsim_run.sh -l.
The VENDOR_MODEL_VARIANT options map to particular px4board configuration files in the PX4 source tree under the /boards (opens new window) directory. Specifically VENDOR_MODEL_VARIANT maps to a configuration file boards/VENDOR/MODEL/VARIANT.px4board (e.g. px4_fmu-v5_default corresponds to boards/px4/fmu-v5/default.px4board (opens new window)).
PX4 펌웨어 버전과 사용자 정의 펌웨어 버전은 MAVLink AUTOPILOT_VERSION (opens new window) 메시지를 사용하여 게시되고, QGroundControl < 2>설정 > 요약 기체 패널에서 출력됩니다.
bloaty_compare_master: Binary Size Profiling- ...
# 펌웨어 버전과 Git 태그
The PX4 Firmware Version and Custom Firmware Version are published using the MAVLink AUTOPILOT_VERSION (opens new window) message, and displayed in the QGroundControl Setup > Summary airframe panel:

WARNING
다른 git 태그 형식을 사용하는 경우에는 버전 정보가 정확하게 표시되지 않을 수 있습니다. The git tag should be formatted as <PX4-version>-<vendor-version> (e.g. the tag in the image above was set to v1.8.1-2.22.1).
WARNING
If you use a different git tag format, versions information may not be displayed properly.