# LightWare SF1X/SF02/LW20 라이다
LightWare는 UAV에 장착에 적합한 경량의 범용 레이저 고도계( "라이다")를 개발합니다. 지형 추적, 정밀 호버링 (예 : 사진 촬영), 규제 높이 제한 경고, 충돌 방지 감지 등에 사용됩니다.

# 지원 모델
아래의 모델들은 PX4에서 지원되며, I2C 또는 직렬 버스에 연결할 수 있습니다 (아래 표는 각 모델에 사용할 수 있는 버스를 나타냄).
# 이용 가능
| 모델 | 범위 (m) | 버스 | 설명 |
|---|---|---|---|
| SF11/C (opens new window) | 100 | 직렬 또는 I2C 버스 | |
| LW20/C (opens new window) | 100 | I2C 버스 | 감지 및 회피 애플리케이션을 위한 서보가 있는 방수 (IP67) |
# 단종됨
다음 모델은 제조업체에서 더 이상 판매하지 않습니다.
| 모델 | 범위 | 버스 |
|---|---|---|
| SF02 (opens new window) | 50 | 직렬 |
| SF10/A (opens new window) | 25 | 직렬 또는 I2C 버스 |
| SF10/B (opens new window) | 50 | 직렬 또는 I2C 버스 |
| SF10/C | 100m | 직렬 또는 I2C 버스 |
| LW20/B | 50 | I2C 버스 |
# I2C 설정
I2C 포트에 연결 가능한 모델을 위의 표를 참고하십시오.
# 라이다 설정
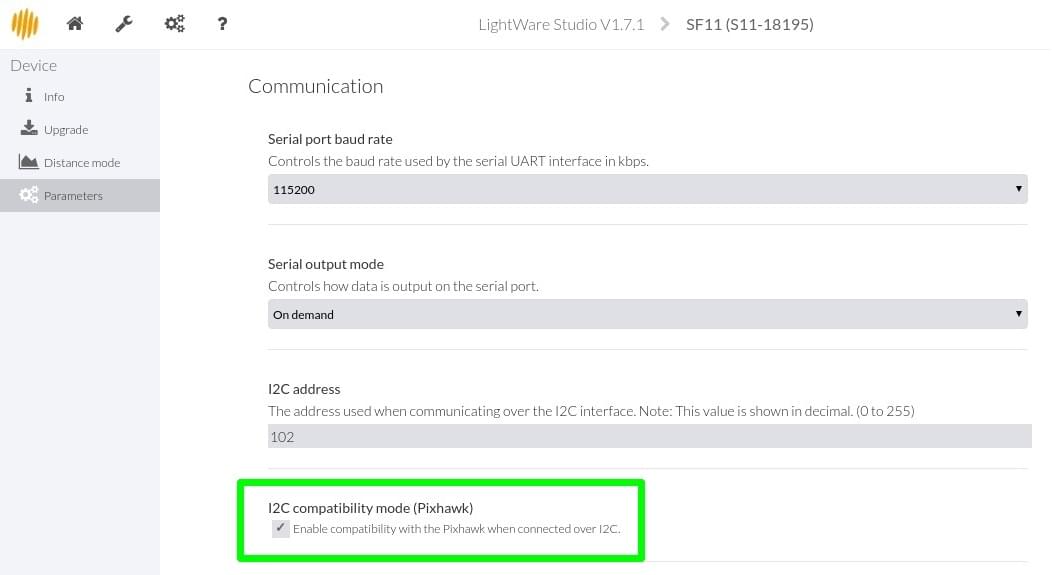
이 하드웨어는 기본적으로 활성화된 Pixhawk I2C 호환성과 함께 제공되지 않습니다. 지원을 활성화하려면 LightWare Studio (opens new window)를 다운로드하고 매개 변수 > 통신으로 이동하여 **I2C 호환 모드(Pixhawk)**를 선택하여야합니다.
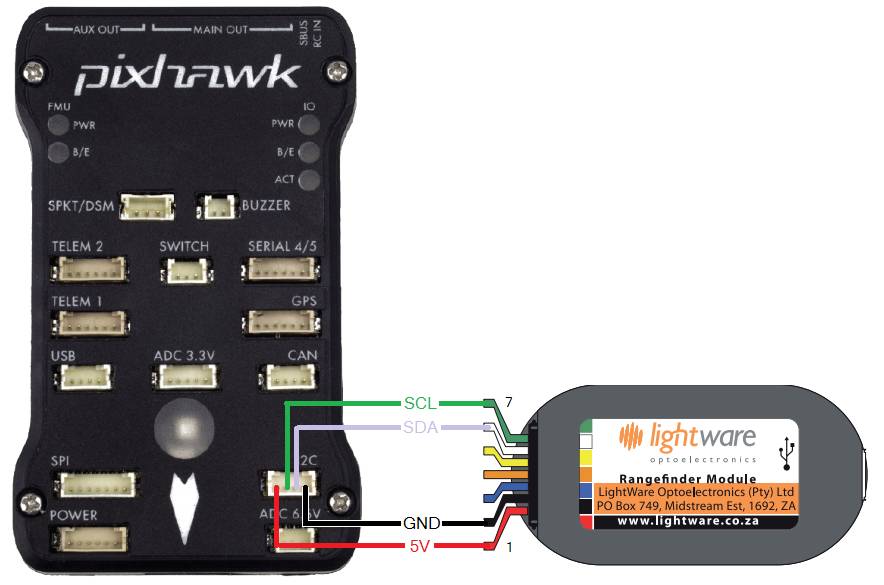
# 하드웨어
아래 그림과 같이 자동조종장치 I2C 포트에 라이다를 연결합니다 (이 경우 Pixhawk 1의 경우).
Note
일부 이전 버전은 PX4에서 사용할 수 없습니다. 특히 0x55와 같은 I2C 주소를 갖도록 잘못 설정되어 rgbled 모듈과 충돌할 수 있습니다. On Linux systems you may be able to determine the address using i2cdetect (opens new window). I2C 주소가 0x66과 동일하면, 센서를 PX4와 함께 사용할 수 있습니다.
# 매개변수 설정
거리계 모델과 일치하도록 SENS_EN_SF1XX 매개변수를 설정후 재부팅 하십시오.
# 직렬 설정
# 하드웨어
LIDAR는 사용하지 않는 직렬 포트 (UART) (예 : TELEM2, TELEM3, GPS2 등)에 연결할 수 있습니다.
# 매개변수 설정
SENS_SF0X_CFG를 사용하여 LIDAR가 실행될 직렬 포트를 설정합니다. 포트 전송속도는 드라이버에 의해 설정되므로, 추가로 설정할 필요는 없습니다.
Note
QGroundControl에서 설정 매개변수를 사용할 수 없는 경우에는 펌웨어에 드라이버를 추가하여야 합니다.
그런 다음 SENS_EN_SF0X 매개변수를 거리계 모델과 일치하도록 설정하고 재부팅하십시오.