# 움직임 감지 기술로 비행하기 (VICON, 광추적)
VICON이나 광추적 같은 실내 움직임 감지 체계는 기체 상태 추정시 위치와 자세 정보를 제공하거나, 분석시 실제 값으로 활용할 수 있습니다. 움직임 감지 데이터는 지역 원점을 기준으로 PX4의 지역 위치 추정치 업데이트에 활용할 수 있습니다. 선택에 따라 움직임 감지 체계의 방위(Yaw)값도 자세 추정기에 통합할 수 있습니다.
움직임 감지 체계 가져온 자세 (위치 및 방향) 데이터는 MAVLink의 ATT_POS_MOCAP (opens new window) 메시지에 실어 자동 비행 장치로 전달합니다. 데이터 표현 방식용 좌표 프레임은 아래 절을 참고하십시오. mavros ROS-Mavlink 인터페이스에는 이 메시지를 보낼 기본 플러그인이 있습니다. 순수한 C/C++ 코드와 MAVLink 라이브러리를 직접 사용하여 보낼 수도 있습니다.
# 처리 구조
온전한 통신 수행을 위해 내장 컴퓨터(예: 라즈베리 파이, 오드로이드 등)로의 동영상 촬영 데이터 전송 방식을 강력 추천합니다. 내장 컴퓨터는 안정적인 고대역폭 WiFi 연결로 움직임 감지 컴퓨터에 연결할 수 있습니다.
3DR/SiK 라디오 와 같은 대부분의 표준 텔레메트리 연결은 고대역폭 움직임 감지 활용에 ** 적합하지 않습니다 **.
# 좌표 프레임
이 절에서는 적당한 참조 프레임 체계의 설정 방법을 알려드리겠습니다. 다양한 표현법이 있지만 ENU와 NED 방식을 활용하겠습니다.
- ENU는 지상 고정 좌표로서, X축은 동쪽, Y 축은 북쪽, Z축은 상공을 향합니다. 로봇/기체 틀 기준으로는 X축은 전면, Z축은 상단, Y축은 좌측을 향합니다.
- NED에서 X축은 북쪽, Y축은 동쪽, Z축은 지면을 향합니다. 로봇/기체 틀 기준으로는 X축은 북쪽, Y축은 동쪽 Z축은 지면을 향합니다.
아래 그림에서 프레임의 방향 상태를 보여드립니다. NED는 좌측, ENU는 우측에 있습니다: 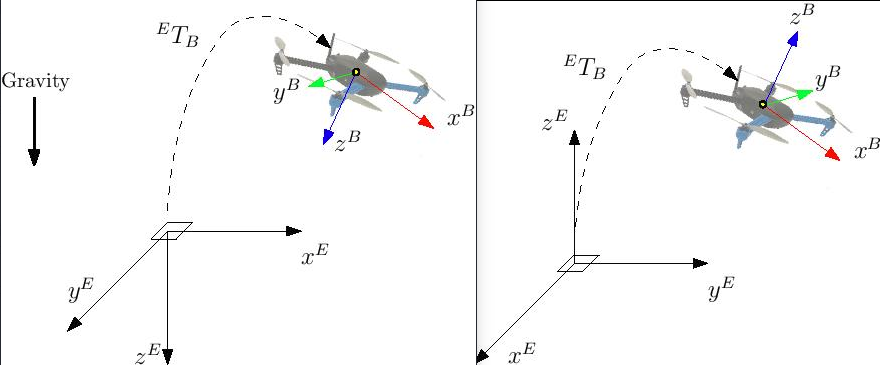
그러나 외부 방향 추정시, 자북은 무시하고 가상 세계 X 좌표 축을 따라 벡터 기준을 삼습니다(움직임 촬영 기법으로 보정할 때 언제든 자유롭게 둘 수 있습니다), 방위각면이 로컬 x 좌표를 두는 면입니다.
WARNING
움직임을 감지하는 프로그램에서 강체를 만들 때, 세계 X 좌표 축에 로봇을 우선 맞춰야 함을 기억하십시오. 그렇지 않으면 방위 회전각 추정시 초기 오프셋으로 처리합니다.
# 추정자 선택
# LPE와 고도 추정자 Q
# EKF2
움직임 촬영 기법에 있어 mocap 시스템에선 mocap_pose_estimate을 시각 정보 처리에는 vision_pose_estimate를 ROS 토픽 메시지로 다룹니다. 더 자세한 정보는 mavros_extras (opens new window)를 확인하십시오.