# Pixhawk 4 Mini
Pixhawk® 4 Mini 自动驾驶仪是为想办法利用 Pixhawk 4 的力量,但是使用的是较小的无人机的工程师和爱好者而设计的。 Pixhawk 4 Mini 使用 Pixhawk 4 相同的 FMU 处理器与储存资源,同时砍掉了通常不会使用的接口。 这使得 Pixhawk 4 Mini 足够小,可以装到 250mm 的穿越机上。
Pixhawk 4 Mini 由 Holybro® 和 Auterion® 合作设计开发。 它基于 Pixhawk (opens new window) FMUv5 设计标准,并为 PX4 飞行控制软件优化。 This allows the Pixhawk 4 Mini to be small enough to fit in a 250mm racer drone.
Pixhawk 4 Mini was designed and developed in collaboration with Holybro® and Auterion®. It is based on the Pixhawk (opens new window) FMUv5 design standard and is optimized to run PX4 flight control software.

提示
This autopilot is supported by the PX4 maintenance and test teams.
# 概览
- 主 FMU 处理器:STM32F765
- 32 位 Arm® Cortex®-M7,216MHz,2MB 储存,512KB RAM
- 内置传感器:
- 加速度计 / 陀螺仪:ICM-20689
- 加速度计 / 陀螺仪:BMI055
- 磁力计:IST8310
- 气压计:MS5611
- GPS:ublox Neo-M8N GPS/GLONASS 接收器;集成磁力计 IST8310
- 接口:
- 8 路 PWM 输出
- FMU 上有 4 路专用 PWM/Capture 输入
- 用于 CPPM 的专用遥控输入
- 用于 Spektrum / DSM 与 有模拟 / PWM RSSI 的 S.Bus 的专用遥控输入
- 3个通用串行口
- 2 路 I2C 总线
- 3 路 SPI 总线
- 1 路 CAN 总线用于 CAN 电调
- 电池电压 / 电流模拟输入口
- 2 个模拟输入接口
- 电源系统:
- Power 接口输入:4.75~5.5V
- USB 电源输入:4.75~5.25V
- 舵机轨道输入:0~24V
- 最大电流感应:120A
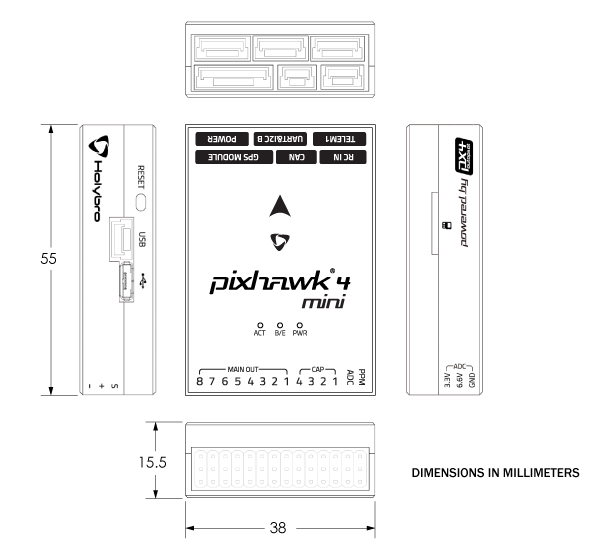
- 重量和尺寸:
- Weight: 37.2g
- Dimensions: 38x55x15.5mm
- 其它特性:
- 工作温度:-40 ~ 85°C
Additional information can be found in the Pixhawk 4 Mini Technical Data Sheet (opens new window).
# 采购
在此下载 (opens new window) Pixhawk 4 Mini 的 pinout。
# 接口
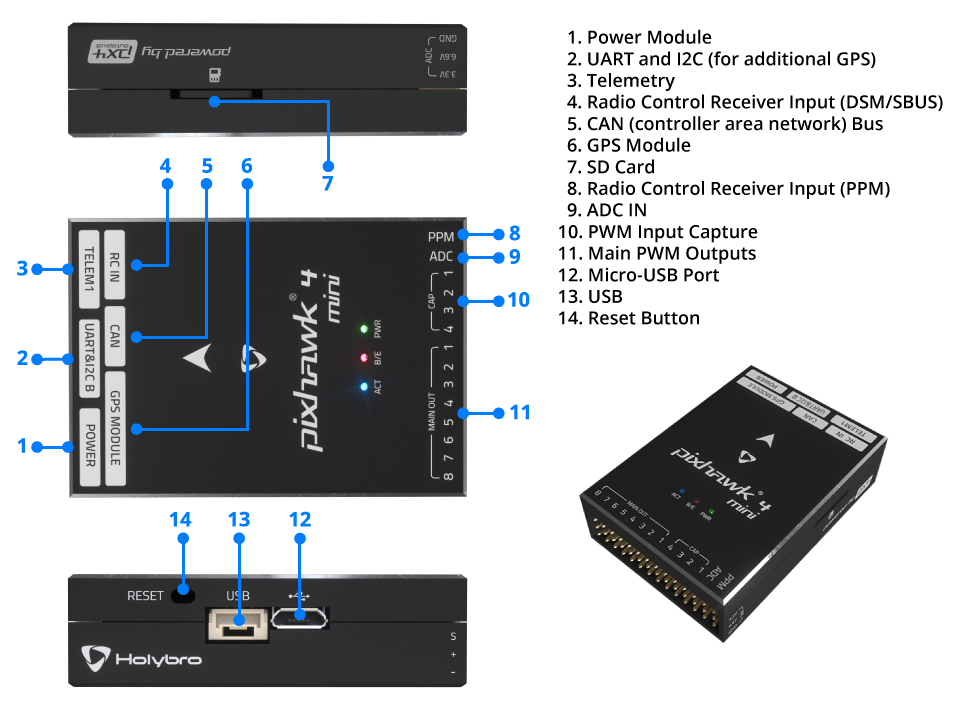
注意
The RC IN and PPM ports are for RC receivers only. These are powered! NEVER connect any servos, power supplies or batteries (or to any connected receiver).
# 针脚定义
Download Pixhawk 4 Mini pinouts from here (opens new window).
# 尺寸
# 额定电压
Pixhawk 4 Mini can have power supply redundancy — if two power sources are supplied. The power rails are: POWER and USB.
注解
The output power rail of MAIN OUT does not power the flight controller board (and is not powered by it). You must supply power to one of POWER or USB or the board will be unpowered.
Normal Operation Maximum Ratings
为此目标 编译 PX4:
- POWER(4.75V 至 5.5V)
- USB 输入电压(4.75 v 至 5.25 v)
Absolute Maximum Ratings
Under these conditions the system will remain intact.
- POWER 输入(0V 至 6V 不会损坏)
- USB 输入(0V 至 6V 不会损坏)
- 舵机输入:MAIN OUT 的 VDD_SERVO 针脚 (0V 至 24V 不会损坏)
# 组装 / 设置
The Pixhawk 4 Mini Wiring Quick Start provides instructions on how to assemble required/important peripherals including GPS, Power Management Board, etc.
# 编译固件
电机和舵机按照 机架参考 中为您的飞机指定的顺序连接至 MAIN OUT 端口。 本参考列出了所有支持的空中和地面机架的接口和电机/舵机的映射关系(如果你的机架没有在参考列表里,你可以使用对应类型的“通用(generic)”机架)。 :::
To build PX4 for this target:
make px4_fmu-v5_default
# 调试接口
The PX4 System Console and SWD interface run on the FMU Debug port. In order to access these ports, the user must remove the Pixhawk 4 Mini casing.

The port has a standard serial pinout and can be connected to a standard FTDI cable (3.3V, but it's 5V tolerant) or a Dronecode probe (opens new window). The pinout uses the standard Pixhawk debug connector (opens new window) pinout. Please refer to the wiring page for details of how to wire up this port.
# Serial Port Mapping
| UART | 设备 | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX is RC input from SBUS_RC connector |
| UART7 | /dev/ttyS5 | Debug Console |
| UART8 | /dev/ttyS6 | Not connected (no PX4IO) |
# 外部设备
# 支持的平台
Motors and servos are connected to the MAIN OUT ports in the order specified for your vehicle in the Airframe Reference. This reference lists the output port to motor/servo mapping for all supported air and ground frames (if your frame is not listed in the reference then use a "generic" airframe of the correct type).
注意
Pixhawk 4 Mini does not have AUX ports. The board cannot be used with frames that require more than 8 ports or which use AUX ports for motors or control surfaces. It can be used for airframes that use AUX for non-essential peripherals (e.g. "feed-through of RC AUX1 channel").