# 거리 센서 및 RTK GPS가 장착 된 DJI Flame Wheel 450 (Pixhawk 3 Pro)
*DJI® Flame Wheel F450 * Quadcopter는 아마추어 항공 사진, 1 인칭 시점 애플리케이션 및 일반적인 비행 엔터테인먼트를 위해 설계되었습니다. 아래의 조립 방법은 Pixhawk 3 Pro 비행 컨트롤러와 함께 프레임을 사용하기위한 조립 방법과 설정 방법을 설명합니다. 정밀한 위치 지정을위한 RTK GPS와 거리 센서가 포함되어 있습니다.
주요 정보:
- 프레임: DJI Flame Wheel 450
- 비행 컨트롤러: Pixhawk 3 Pro
- **위치정보: ** RTK GPS


# 부품 목록
- 비행 컨트롤러: Pixhawk 3 Pro
- 프레임: DJI Flamewheel 450 (opens new window)
- 모토: 3DR Iris Plus 950kv rebranded T-Motors MN2213
- 전기변속기: Hobbywing XRotor 35A Micro 3-6S BLHeli
- 블레이드: Graupner 10"x5" (M6와 호환되도록 이 어댑터 (opens new window)를 인쇄해야합니다.)
- 거리 센서: Lidar-Lite V3
- GPS: Here+ RTK GPS
- Telemetry: 3DR Telemetry
- 배터리: Roxxy LiPo - 4S, 4000mAh
또한, FrSky X4R-SB 3/16ch 2.4Ghz 수신기와 FrSky Taranis 컨트롤러를 사용합니다. 이번 조립에는 동일한 블레이드를 사용하는 경우 지퍼 타이, 양면 테이프, 납땜 인두 및 3D 프린터도 필요합니다. GPS 마스트는 Intel Aero에서 재사용되었습니다.
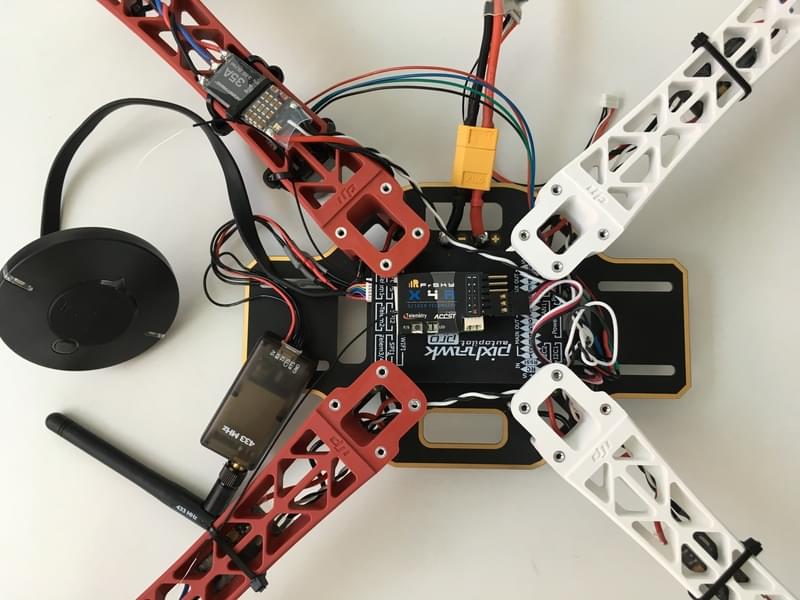
Pixhawk 3 Pro는 내부 IMU가 이미 축축되어 있기 때문에 양면 테이프를 사용하여 부착 할 수 있습니다.
이 설정에서는 자동 조종 장치가 180도 회전되어 SD 카드에 접근이 더욱 용이합니다. 그러나, 베이스 플레이트를 180도 돌리면, 비행 컨트롤러 보드를 전면에 장착할 수 있습니다. 두 방법 모두 가능하나, QGroundControl에서 보드 회전의 설정을 확인하여야 합니다.
# 배선
Pixhawk 3 Pro의 일반 핀아웃은 여기 (opens new window)에서 조회할 수 있습니다.
# Telemetry Radio
Note
The 3DR Telemetry radio used here is no longer available. Comparable alternatives can be found in Telemetry Radios > SiK Radio.
The 3DR Telemetry radio does not come with a JST GH connector which the Pixhawk 3 Pro uses. 핀아웃은 동일하게 유지되며 플러그만 변경하면됩니다. Use the TELEM 1 port on the Pixhawk 3 Pro.
| 핀 | Pixhawk 3 Pro Telem 1 | 3DR 텔레메트리 |
|---|---|---|
| 1 | VCC | VCC |
| 2 | TX | RX |
| 3 | RX | TX |
| 4 | CTS | CTS |
| 5 | RTS | RTS |
| 6 | GND | GND |
# Lidar-Lite V3
The pinout for the Lidar Lite V3 and the Pixhawk 3 Pro I2C 1 port is as follows.
| 핀 | Pixhawk 3 Pro I2C 1 | Lidar Lite V3 |
|---|---|---|
| 1 | VCC | VCC |
| 2 | SCL | - (Power enable) |
| 3 | SDA | - (Mode control) |
| 4 | GND | SCL |
| 5 | - | SDA |
| 6 | - | GND |
# Here+ RTK GPS
Note
This RTK GPS has been discontinued. Alternatives can be found here
The Here+ RTK GPS comes with an 8 pin connector suited for the Pixhawk 2. Here + GPS는 Pixhawk 2에 적합한 8 핀 커넥터와 함께 제공됩니다. 추가 핀은 안전 버튼용이며 필요한 경우 부착 할 수 있습니다.
핀아웃에 대한 상세한 내용은 17 페이지의 이 문서 (opens new window)에서 확인하십시오.

| 핀 | Here+ GPS | 핀 | Pixhawk 3 Pro GPS |
|---|---|---|---|
| 1 | VCC_5V | 1 | VCC |
| 2 | GPS_RX | 2 | GPS_TX |
| 3 | GPS_TX | 3 | GPS_RX |
| 4 | SCL | 4 | SCL |
| 5 | SDA | 5 | SDA |
| 6 | BUTTON | - | - |
| 7 | BUTTON_LED | - | - |
| 8 | GND | 6 | GND |
# PX4 Configuration
QGroundControl에서 쿼드콥터를 설정법에 대한 일반 문서는 기본 구성을 참고하십시오. 특정한 설정에 관련된 지침이 아래에서 제공됩니다.
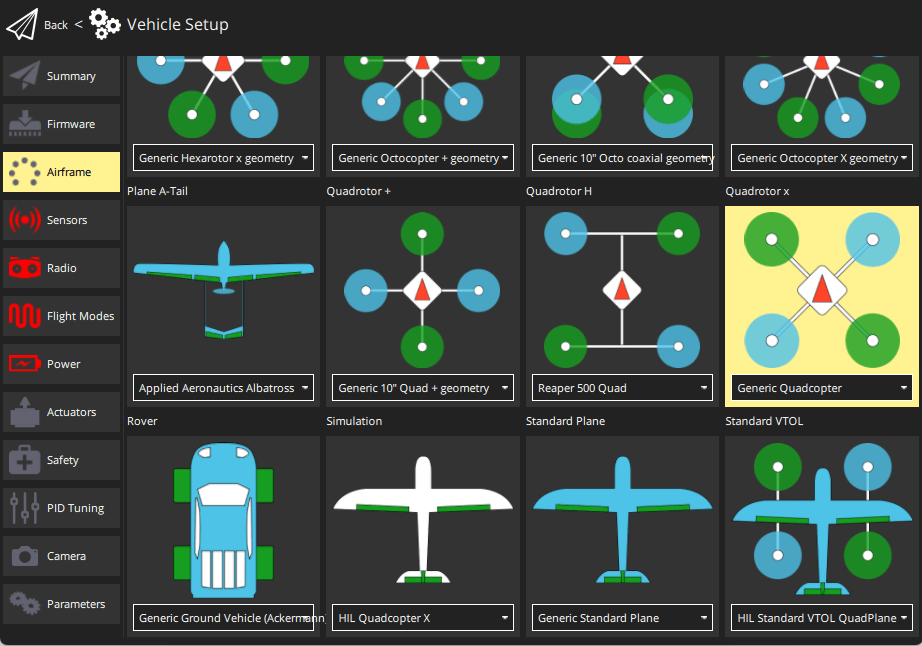
# 기체
In the Airframe configuration, select the Generic Quadcopter airframe (Quadrotor x > Generic Quadcopter).
# Actuators
In the Actuators configuration in QGroundControl
- Update the vehicle geometry to match the Flamewheel 450
- Assign actuators functions to outputs as wired.
- Test the configuration using the sliders.
# RTK GPS
RTK GPS는 플러그 앤 플레이입니다. For more instructions see here.
# Lidar-Lite
Lidar-Lite V3 (I2C를 통해 연결됨)를 활성화하려면 SENS_EN_LL40LS 매개 변수를 I2C로 설정해야합니다.
This can be done in QGroundControl (see Finding/Updating Parameters) as shown below:
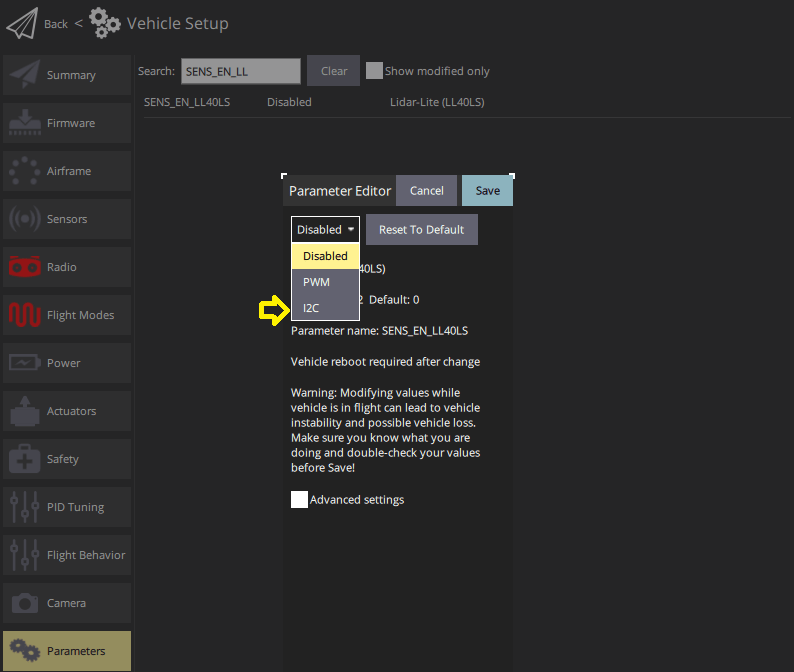
Note
SENS_EN_LL40LS를 설정한 다음에는 비행 컨트롤러를 재부팅하여야 합니다.
# 기타
아래의 매개 변수도 설정하십시오.
MAV_PROTO_VER = 2: MAVLink 프로토콜 버전 2 사용CBRK_IO_SAFETY = 22027: 안전 버튼 비활성화EKF2_GPS_POS_X,EKF2_GPS_POS_Y,EKF2_GPS_POS_Z: 보드 (NED 좌표)를 기준으로 GPS 장치 오프셋을 설정합니다.
# Tuning
Airframe selection sets default autopilot parameters for the frame. These may be good enough to fly with, but you should tune each frame build.
For instructions on how, start from Autotune.