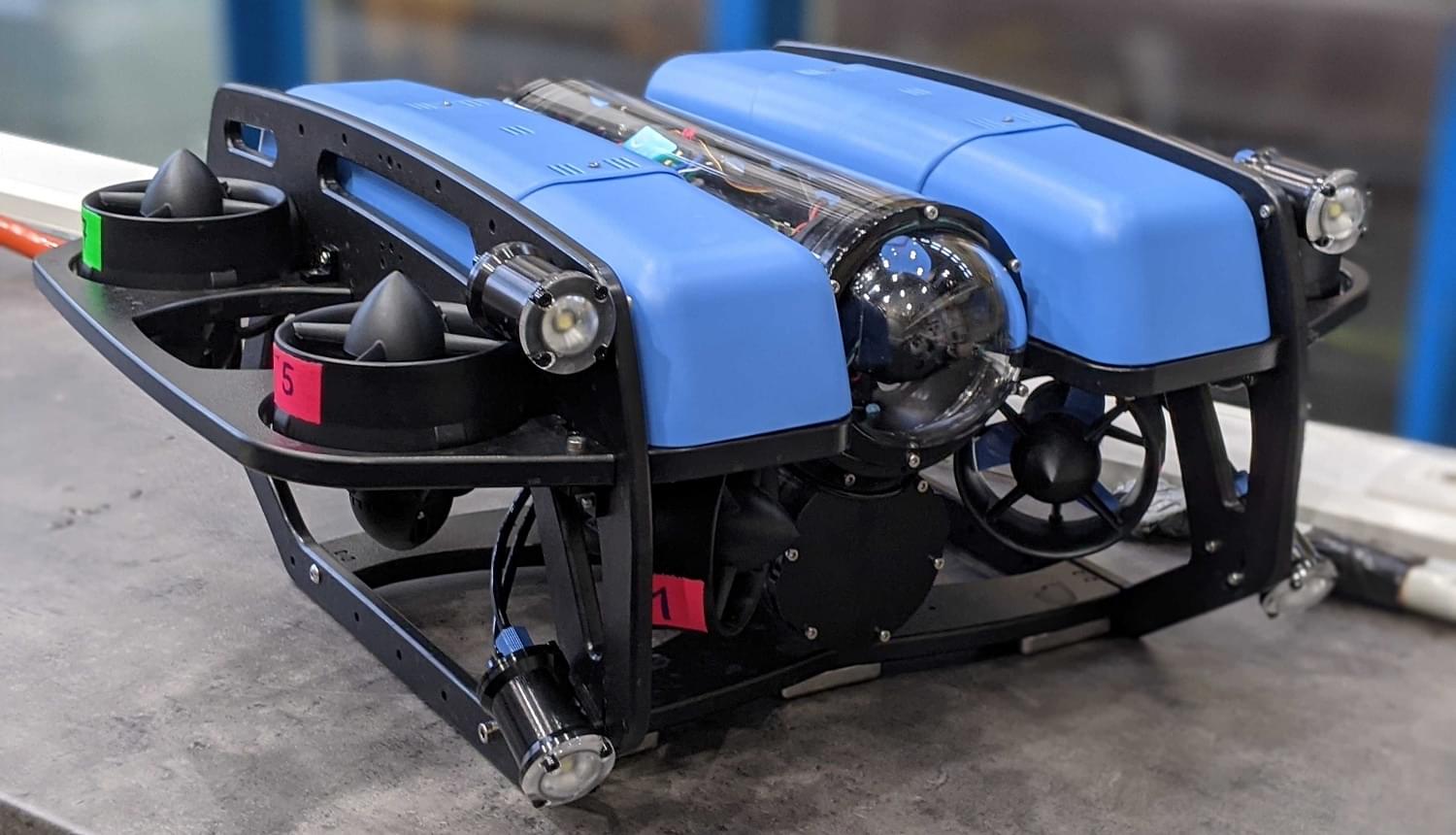
# BlueROV2 (UUV)
BlueROV2 (opens new window)는 검사, 연구와 탐사에 적절한 경제적인 고성능 수중 차량입니다.
PX4는 BlueROV2 Heavy Configuration으로 알려진 8 추력 벡터 설정에 대한 실험적 지원을 제공합니다.
# Where to Buy
BlueROV2 (opens new window) + BlueROV2 Heavy Configuration Retrofit Kit (opens new window)
# 모터 매핑과 배선
모터는 BlueRobotics의 표준 지침에 따라 비행 컨트롤러에 연결되어야 합니다.
그러면 차량이 기체 정의서에 문서화된 설정과 일치합니다.

- MAIN1: 모터 1 CCW, 선수 우현 수평,, 프로펠러 CCW
- MAIN2: 모터 2 CCW, 선수 포트 수평, 프로펠러 CCW
- MAIN3: 모터 3 CCW, 선미 우현 수평, 프로펠러 CW
- MAIN4: 모터 4 CCW, 스턴 포트 수평, 프로펠러 CW
- MAIN5: 모터 5 CCW, 선수 우현 수직, 프로펠러 CCW
- MAIN6: 모터 6 CCW, 보우 포트 수직, 프로펠러 CW
- MAIN7: 모터 7 CCW, 선미 우현 수직, 프로펠러 CW
- MAIN8: 모터 8 CCW, 선미 포트 수직, 프로펠러 CCW
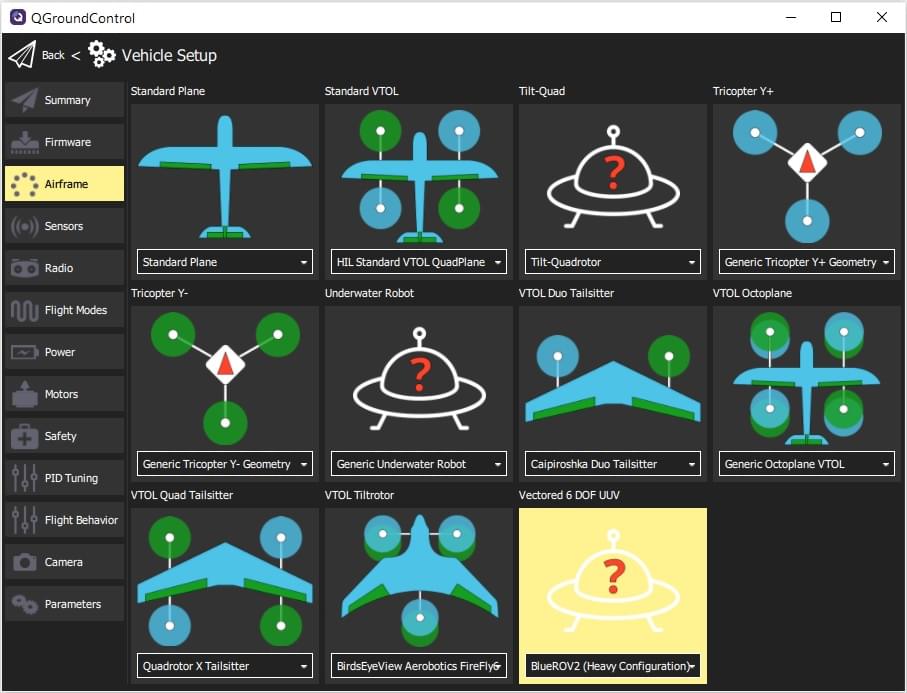
# 기체 설정
BlueROV2는 PX4가 설치된 상태로 제공되지 않습니다. 다음을 수행해야합니다.
- Install PX4 Firmware :::note Prior to PX4 v1.12 you will need to install the "master" version.
- 기체 설정. 다음과 같이 "BlueROV2 Heavy Configuration"을 선택하여야 합니다.