# Gazebo Vehicles
This topic lists/displays the vehicles supported by the PX4 Gazebo simulation, and the make commands required to run them (the commands are run from a terminal in the PX4-Autopilot directory).
Supported vehicle types include: mutirotor, VTOL, Plane.
Note
The Gazebo page shows how to install Gazebo.
WARNING
See Gazebo Classic Vehicles for vehicles that work with the older Gazebo "Classic" simulation. Note that vehicle models are not interchangable between the two versions of the simulator: the vehicles on this page only work with (new) Gazebo.
# Multicopter
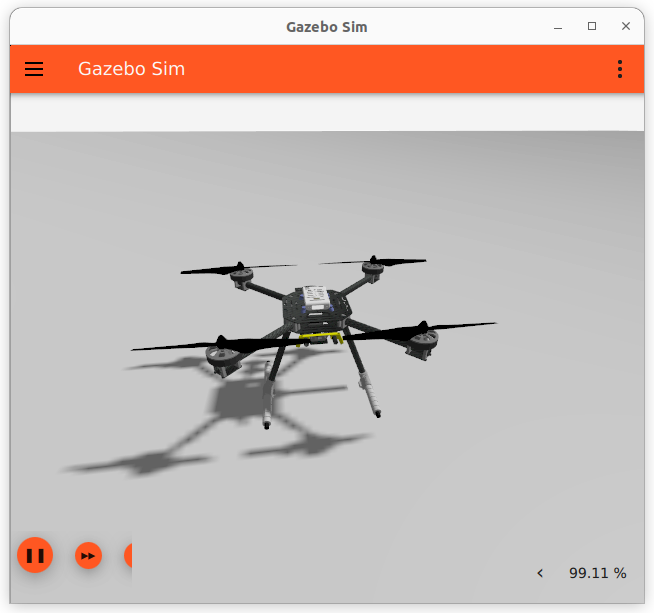
# X500 Quadrotor
make px4_sitl gz_x500
# X500 Quadrotor with Visual Odometry
make px4_sitl gz_x500_vision
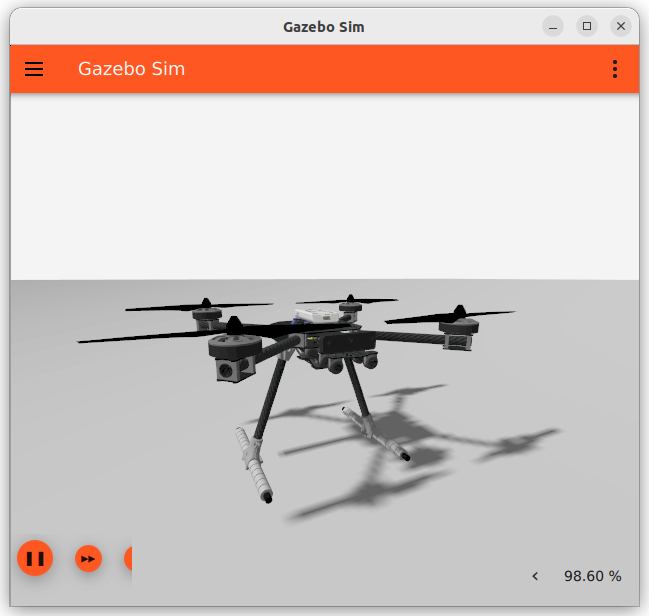
# X500 Quadrotor with Depth Camera
These models have a depth camera attached, modelled on the OAK-D.
Forward-facing depth camera:
make px4_sitl gz_x500_depth
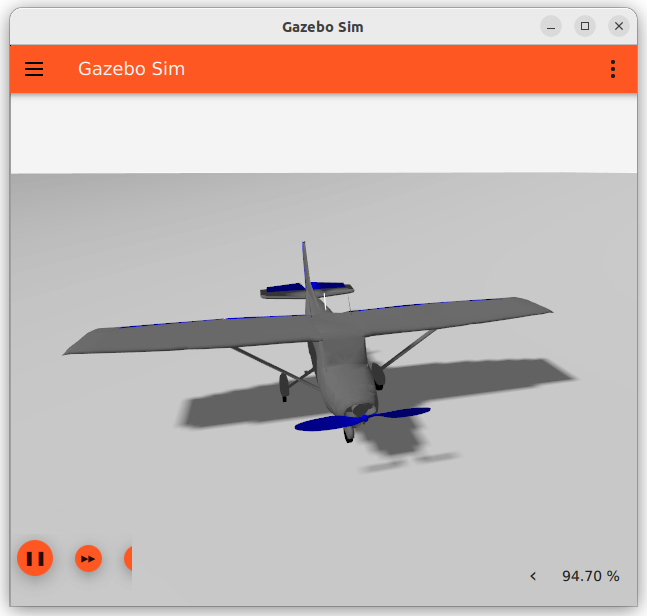
# Plane/Fixed-wing
# Standard Plane
make px4_sitl gz_rc_cessna
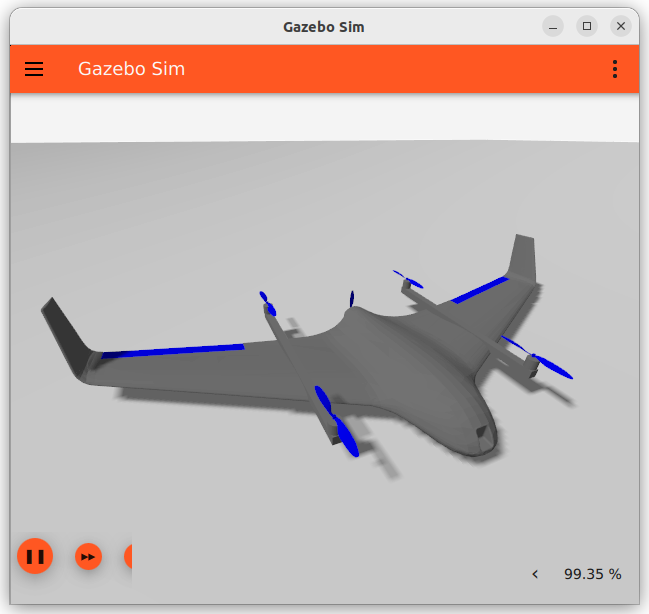
# VTOL
# Standard VTOL
make px4_sitl gz_standard_vtol