# 하드웨어 시뮬레이션(SIH)
Simulation-In-Hardware (SIH) is an alternative to Hardware In The Loop simulation (HITL) for quadrotors, fixed-wing vehicles (airplane), and VTOL tailsitters.
SIH can be used by new PX4 users to get familiar with PX4 and the different modes and features, and of course to learn to fly a vehicle using an RC controller in simulation, which is not possible using SITL.
# Overview
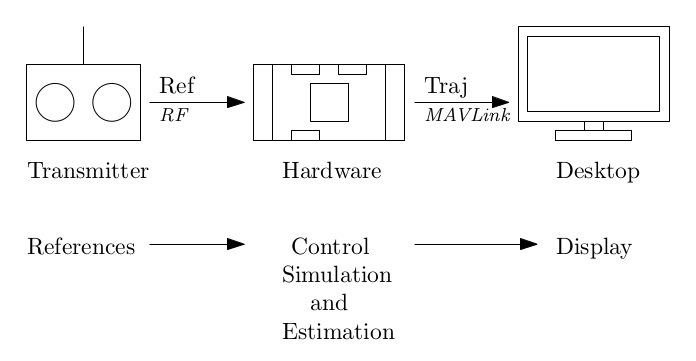
With SIH the whole simulation is running on embedded hardware: the controller, the state estimator, and the simulator. 데스크톱 컴퓨터는 가상 차량을 출력에만 사용됩니다.
# Compatibility
-q- QGroundControl에 대한 통신 허용(선택 사항)- SIH for quadrotor is supported from PX4 v1.9.
- SIH for fixed-wing (airplane) and VTOL tailsitter are supported from PX4 v1.13.
- SIH as SITL (without hardware) from PX4 v1.14.
# Benefits
SIH provides several benefits over HITL:
- 컴퓨터에 대한 양방향 연결을 하지 않으므로, 동기 타이밍을 보장합니다. 사용자는 고사양의 데스크탑 컴퓨터가 필요하지 않습니다.
- 전체 시뮬레이션은 PX4 환경에서 유지됩니다. PX4 개발자는 수학적 모델을 시뮬레이터에 손 쉽게 통합할 수 있습니다. 예를 들어, 공기역학적 모델이나 센서의 소음 수준을 수정하거나 시뮬레이션 센서를 추가할 수 있습니다.
- The physical parameters representing the vehicle (such as mass, inertia, and maximum thrust force) can easily be modified from the SIH parameters.
# 요구 사항
To run the SIH, you will need a:
- Flight controller, such as a Pixhawk-series board
- Development computer for displaying the virtual vehicle.
- Manual controller: either a radio control system or a joystick.
From PX4 v1.14 you can run SIH "as SITL", in which case a flight controller is not required.
# SIH 설정
To set up SIH
- Connect the flight controller to the desktop computer with a USB cable
- Open QGroundControl and wait for the flight controller too boot and connect.
- Open Vehicle Setup > Airframe then select the desired frame:
The autopilot will then reboot. Once restarted the sih module is started, and the vehicle should be displayed on the ground control station map.
WARNING
The airplane needs to takeoff in manual mode at full throttle. Also, if the airplane crashes the state estimator might lose its fix.
# 디스플레이 설정
To display the simulated vehicle:
Close QGroundControl (if open).
Unplug and replug the flight controller (allow a few seconds for it to boot).
터미널에서 jmavsim_run.sh 스크립트를 입력하여, jMAVSim을 실행합니다.
./Tools/simulation/jmavsim/jmavsim_run.sh -q -d /dev/ttyACM0 -b 2000000 -owhere the flags are:
-qto allow the communication to QGroundControl (optional).-dLinux에서 직렬 장치/dev/ttyACM0를 사용합니다. MacOS에서는/dev/tty.usbmodem1를 사용합니다.-b직렬 전송 속도를2000000으로 설정합니다.-oto start jMAVSim in display Only mode (i.e. the physical engine is turned off and jMAVSim only displays the trajectory given by the SIH in real-time).- add a flag
-ato display an aircraft or '-t' to display a tailsitter. 이 플래그가 없으면 기본적으로 쿼드로터가 표시됩니다.
After few seconds, QGroundControl can be opened again.
At this point, the system can be armed and flown. The vehicle can be observed moving in jMAVSim, and on the QGC Fly view.
# Running the SIH as SITL (without hardware)
SIH can be run as SITL (Software-In-The-Loop) from v1.14. What this means is that the simulation code is executed on the laptop/computer, similar to Gazebo or jMAVSim. In this case you don't need the flight controller hardware.
To run SIH as SITL:
Install the PX4 Development toolchain.
Run the appropriate make command for each vehicle type (at the root of the PX4-Autopilot repository):
quadrotor:
make px4_sitl sihsim_quadxFixed-wing (plane):
make px4_sitl sihsim_airplaneXVert VTOL tailsitter:
make px4_sitl sihsim_xvert
SITL allows the simulation to be run faster than real time. To run the airplane simulation 10 times faster than real time, run the commandL
PX4_SIM_SPEED_FACTOR=10 make px4_sitl sihsim_airplane
# Dynamic Model
The dynamic models for the various vehicles are:
- Quadrotor: pdf report (opens new window).
- Fixed-wing: Inspired by the PhD thesis: "Dynamics modeling of agile fixed-wing unmanned aerial vehicles." Khan, Waqas, supervised by Nahon, Meyer, McGill University, PhD thesis, 2016.
- Tailsitter: Inspired by the master's thesis: "Modeling and control of a flying wing tailsitter unmanned aerial vehicle." Chiappinelli, Romain, supervised by Nahon, Meyer, McGill University, Masters thesis, 2018.
# Video
# 개발진
SIH was originally developed by Coriolis g Corporation. The airplane model and tailsitter models were added by Altitude R&D inc. Both are Canadian companies:
- Coriolis g (opens new window) develops a new type of Vertical Takeoff and Landing (VTOL) vehicles based on passive coupling systems;
- Altitude R&D (opens new window) is specialized in dynamics, control, and real-time simulation.
The simulator is released for free under BSD license.