# 特技模式(多旋翼)


Acro mode is the RC mode for performing acrobatic maneuvers e.g. flips, rolls and loops.
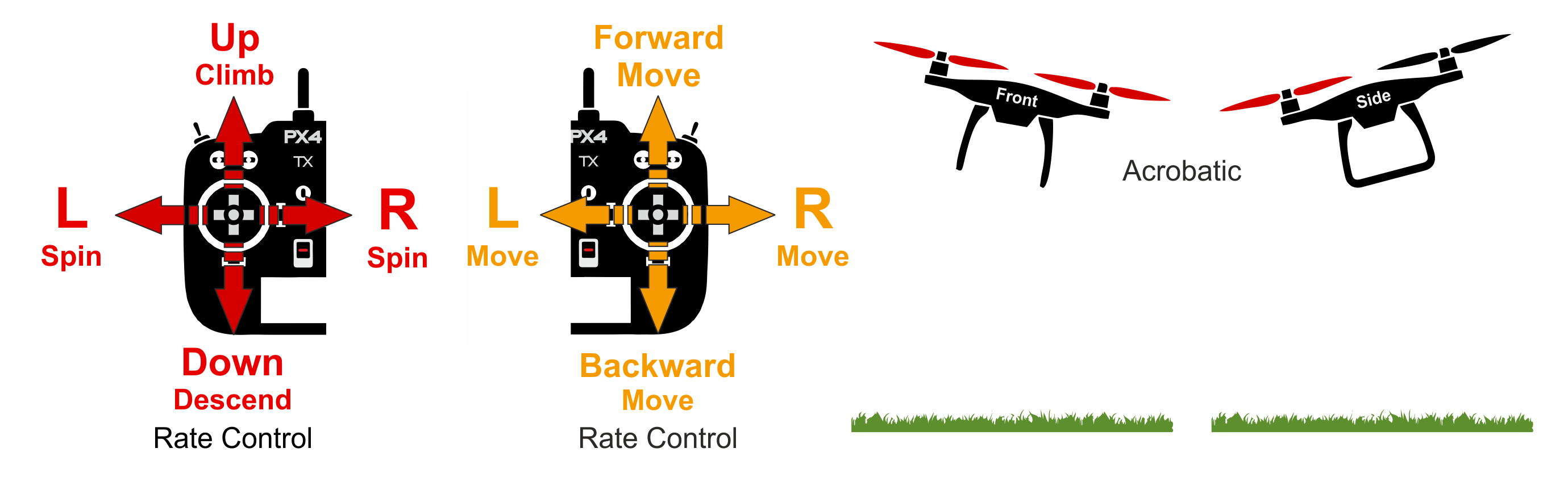
RPY摇杆输入控制围绕各自轴的角度旋转速率。 当操纵杆居中时,飞机将停止旋转,但保持其当前朝向(不一定是水平)。
# 技术描述
用于执行特技动作的R遥控/手动模式,例如翻转,滚转和环绕。
RC RPY stick inputs control the rate of angular rotation around the respective axes. When sticks are centered the vehicle will stop rotating, but remain in its current orientation (not necessarily level).
# 杆输入映射
特技模式下默认的滚转、俯仰和偏航操纵杆输入映射如下所示。 该曲线使得在最大杆输入处具有大转弯速率能够进行特技动作,在靠近杆回中位置的区域具有较低灵敏度以进行微调。

可以使用MC_ACRO_EXPO和MC_ACRO_SUPEXPO“指数”参数调整滚转和俯仰轴杆输入响应,同时使用MC_ACRO_EXPO_Y和MC_ACRO_SUPEXPOY调整偏航轴杆输入响应 。 MC_ACRO_EXPO和MC_ACRO_EXPO_Y参数用于调整线性曲线和三次曲线之间的曲线,如下所示。 MC_ACRO_SUPEXPO和MC_ACRO_SUPEXPOY允许进一步调整曲线形状,修改低灵敏度区域的宽度。


注解
The mathematical relationship is:
f = MC_ACRO_EXPO 或 MC_ACRO_EXPO_Y,g = MC_ACRO_SUPEXPO 或 MC_ACRO_SUPEXPOY , r 为最大速率。 您可以在此处 (opens new window)进行试验。
# 参数
| 参数 | 描述 |
|---|---|
| MC_ACRO_EXPO | 特技模式“指数”因子,用于调整滚转和俯仰轴的杆输入曲线形状。 值:0表示纯线性输入曲线,1表示纯三次输入曲线。 默认:0.69 |
| MC_ACRO_EXPO_Y | 特技模式“指数”因子,用于调整偏航轴的杆输入曲线形状。 值:0表示纯线性输入曲线,1表示纯三次输入曲线。 默认:0.69 |
| MC_ACRO_SUPEXPO | 特技模式“超级指数”因子,用于精细调整滚动轴和俯仰轴的杆输入曲线形状(使用MC_ACRO_EXPO进行调整)。 值:0——纯指数函数,0.7——合理增强直观操纵感的形状,0.95——非常弯曲的输入曲线,仅在最大值附近有效。 默认:0.7 |
| MC_ACRO_SUPEXPOY | 特技模式“超级指数”因子用于精细调整偏航轴的杆输入曲线形状(使用MC_ACRO_EXPO_Y进行调整)。 值:0——纯指数函数,0.7——合理增强直观操纵感的形状,0.95——非常弯曲的输入曲线,仅在最大值附近有效。 默认:0.7 |
| MC_ACRO_P_MAX | Max acro pitch rate. Default: 2 turns per second (720.0 deg/s). |
| MC_ACRO_R_MAX | Max acro roll rate. 最大特技滚转速率 默认:每秒2转(720度/秒) |
| MC_ACRO_Y_MAX | Max acro yaw rate. 最大特技偏航速率 默认: 1.5转每秒(540度/秒) |