# 定高模式(多旋翼)


![]()
Altitude mode is a relatively easy-to-fly RC mode in which roll and pitch sticks control vehicle movement in the left-right and forward-back directions (relative to the "front" of the vehicle), yaw stick controls rate of rotation over the horizontal plane, and throttle controls speed of ascent-descent.
When the sticks are released/centered the vehicle will level and maintain the current altitude. 如果在水平面上运动,机体将继持续运动直到任何动量被风阻力消散。 If moving in the horizontal plane the vehicle will continue until any momentum is dissipated by wind resistance. 如果刮风,飞机会向风的方向漂移。
提示
提示
Altitude mode is the safest non-GPS manual mode for new fliers. 就像手动/自稳模式,但是在松开摇杆时也可以锁定机体高度。 It is just like Manual/Stabilized mode but additionally locks the vehicle altitude when the sticks are released.
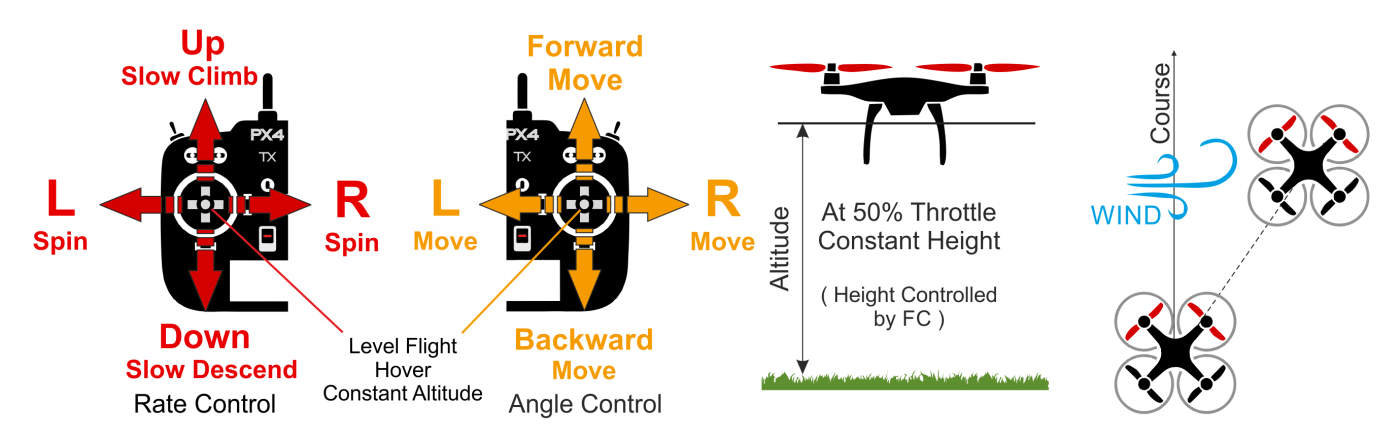
下图直观的展示了该模式(以美国手的遥控器举例)。
# 技术总结
RC/manual mode like Manual/Stabilized (MC) mode but with altitude stabilization (centered sticks level vehicle and hold it to fixed altitude).
- 回正摇杆(内带死区):
- RPY摇杆使飞机水平。
- 油门(~50%)抗风保持当前姿态。
- 外部中心:
- 翻滚/俯仰摇杆控制各自方向的倾斜角,导致左右和前后的移动。
- 油门摇杆以预定的最大速率(和其他轴上的移动速度)控制上升速度。
- 偏航摇杆控制水平面上方的角度旋转速率。
- 起飞:
- 降落时,如果将油门杆抬高至 62.5%(从油门杆最低开始的整个范围),无人机将起飞。
注解
- 需要手动输入(遥控器,或者通过 MAVLink 连接的游戏手柄/拇指摇杆)。
- 通常使用气压计测量高度,在极端天气条件下可能会变的不准确。 带有激光雷达/距离传感器的飞机将能够以更高的可靠性和准确性控制高度。
# 参数
该模式受以下参数影响:
| 参数 | 描述 |
|---|---|
| MPC_Z_VEL_MAX_UP | 最大垂直上升速度。 默认:3m/s。 |
| MPC_Z_VEL_MAX_DN | 最大垂直下降速度。 默认:1m/s。 |
RCX_DZ | 通道 X 的遥控死区。 油门的 X 值取决于 RC_MAP_THROTTLE 的值。 例如,如果油门是通道4,则 RC4_DZ 指定死区。 |
MPC_XXXX | 大多数 MPC_xxx参数会影响此模式下的飞行行为(至少在某种程度上)。 例如,MPC_THR_HOVER定义飞机悬停时的推力。 |