# 정밀 착륙
PX4는 IR-LOCK 센서 (opens new window), IR 비컨(예 IR-LOCK MarkOne (opens new window)), 그리고 하향 범위 센서를 사용하여 멀티콥터 (PX4 v1.7.4 이상)의 정밀 착륙을 지원합니다. 정밀 착륙은 약 10 cm 이내의 오차로 착륙할 수 있게 합니다. GPS 착륙은 수 미터의 오차를 가질 수 있습니다.
정밀 착륙은 정밀 착륙 비행 모드나 임무의 일부로 시작할 수 있습니다.
# 설정
# 하드웨어 설정
공식 매뉴얼 (opens new window)에 따라 IR-LOCK 센서를 장착하십시오. 센서의 x축이 기체의 y축과 정렬되어 있는지, 센서의 y축이 기체의 -x 방향과 정렬되어 있는지 확인하십시오 (카메라에서 전방으로 90도 기울인 경우).
범위거리 센서 (LidarLite v3)를 설치에도 문제가 없습니다.
Note
대부분의 적외선 범위 센서는 IR-LOCK 비콘이 있는 경우에는 제대로 작동하지 않습니다. 호환 가능한 다른 센서는 IR-LOCK 설명서를 참조하십시오.
# 펌웨어 설정
정밀 착륙은 기본적으로 PX4 펌웨어에 포함되어 있지 않은 irlock 모듈과 landing_target_estimator 모듈이 필요합니다. 비행 컨트롤러의 설정 파일 (예 : PX4-Autopilot/boards/px4/fmu-v5/default.cmake (opens new window))에 다음 줄을 추가 (또는 주석 해제)하여 포함시킬 수 있습니다.
drivers/irlock
modules/landing_target_estimator
시스템 부팅시에 두 모듈은 반드시 시작되어야 합니다. 지침은 사용자 정의 시스템 시작편을 참조하십시오.
# 소프트웨어 설정(매개변수)
정밀 착륙은 landing_target_estimator과 navigator 매개변수를 사용하여 설정합니다. 위의 매개변수는 각각 "Landing target estimator"와 "Precision land" 그룹에서 찾을 수 있습니다. 가장 중요한 파라미터는 아래에 설명되어 있습니다.
매개변수 LTEST_MODE는 비컨이 정지할 것인 지 또는 움직일 것인 지를 결정합니다. LTEST_MODE이 이동으로 설정된 경우(예: 착륙할 멀티콥터에 설치된 경우), 비컨 측정은 정밀 랜딩 컨트롤러에서 목표 좌표 생성에만 사용됩니다. LTEST_MODE가 고정으로 설정되면 비컨 측정은 기체 위치 추정기 (EKF2 또는 LPE)에서도 사용됩니다.
기체에 대한 비컨의 상대 위치와 속도를 추정하기 전에, 매개변수 LTEST_SCALE_X와 LTEST_SCALE_Y로 비컨 측정의 스케일을 조정할 수 있습니다. IR-LOCK 센서의 렌즈 왜곡으로 인해 측정 스케일링이 필수적입니다. LTEST_SCALE_X와 LTEST_SCALE_Y은 기체 프레임이 아니라 센서 프레임을 기준이어야 합니다.
이러한 스케일 매개변수를 보정에는 LTEST_MODE를 moving으로 설정하고, landing_target_pose와 vehicle_local_position 을 로깅하는 동안 비컨 위로 멀티콥터를 날려 전후좌우로 기체를 움직이십시오. 그런 다음, landing_target_pose.vx_rel와 landing_target_pose.vy_rel를 각각 vehicle_local_position.vx와 vehicle_local_position.vy와 비교하십시오 (각각의 측정은 NED 프레임에서 이루어집니다). 추정된 비컨 속도가 기체 속도보다 일관되게 작거나 크면 스케일 파라미터를 조정하여 보정합니다.
LTEST_MODE를 정지로 설정하고 정밀착륙 도중 기체의 측면에 진동이 나타나면, 비콘 측정 값이 너무 높게 조정되었을 가능성이 있으므로 관련 방향에서 스케일 매개변수를 줄여야합니다.
# 정밀 착륙 모드
정밀 착륙은 "필수" 또는 "가능성 탐색"으로 설정할 수 있습니다. 모드 선택에 따라 정밀착륙 매커니즘은 달라집니다.
# 필수 모드
필수 모드에서 착륙을 시작할 때 아무런 신호를 찾을 수 없으면 기체는 비컨을 찾기 시작합니다. 비컨을 찾은 경우에는 기체는 정밀 착륙을 실행합니다.
이런 탐색 과정은 탐색 고도까지 상승을 포함합니다(PLD_SRCH_ALT). 기체가 비컨을 탐색 고도에서 찾을 수 없고, 탐색시간 초과 (PLD_SRCH_TOUT)이후에는 현재 위치에서 일반 착륙을 시작합니다.
# 가능성 탐색 모드
가능성 탐색 모드에서는 기체가 착륙이 시행될 때 비컨이 가시적이면 정밀 착륙을 시작합니다. 비컨이 보이지 않으면, 기체는 즉시 현재 위치에서 일반 착륙을 수행합니다.
# 정밀 착륙 수행
Note
현재 좌표 컨트롤러 구현의 한계로, 정밀 착륙은 유효한 GPS 측정 좌표에서만 가능합니다.
# 커맨드를 사용한 수행
정밀 착륙은 아래의 명령으로 시작할 수 있습니다
commander mode auto:precland
이 경우, 정밀 착륙은 "필수" 모드로 간주됩니다.
# 미션에서의 수행
정밀 착륙은 param2을 적절히 설정해 MAV_CMD_NAV_LAND (opens new window)를 사용하여 임무의 일부로 시작됩니다.
param2= 0: 비컨을 사용하지 않은 일반 착륙param2= 1: 가능성 탐색 정밀 착륙param2= 2: 필수 정밀 착륙
# 시뮬레이션
IR-LOCK 센서와 비컨을 사용한 정밀 착륙은 SITL Gazebo에서 시뮬레이션할 수 있습니다.
IR-LOCK 비컨과 범위 센서와 IR-LOCK 카메라가 장착된 기체를 사용하여 시뮬레이션을 시작하려면 다음을 실행하십시오.
make px4_sitl gazebo_iris_irlock
비컨은 Gazebo GUI에서 이동시키거나, Gazebo world (opens new window)에서 비컨을 이동하여 위치를 변경할 수 있습니다.
# 작동 원리
# 착륙 목표 추정기
landing_target_estimator는 irlock 드라이버로부터 측정값을 받을 뿐 아니라, 기체로부터의 비컨의 상대 위치를 추정하기 위한 예상 지형 고도를 받아옵니다.
irock_report의 측정에는 영상 중심에서 비컨으로 각도의 접선이 포함됩니다. 다른 말로, 측정은 z 성분의 크기가 1이고, 측정은 비컨을 나타내는 벡터의 x와 y성분입니다. 비컨에서 카메라부터의 거리의 측정을 스케일링하는것은 비컨에서 카메라까지의 벡터를 반환합니다. 이것으로 상대 위치는 북쪽으로 정렬되게 회전하고, 기체 자세 추정치를 사용해 기체 프레임을 수평으로 만듭니다. 상대 위치 측정의 x, y 성분은 별도의 칼만 필터로 필터링됩니다. 이 필터는 속도 추정치를 생성하고 일시적으로 생긴 이상값을 거부하는 단순 저대역 필터입니다.
landing_target_estimator는 새로운 irlock-report가 추정치에 결합시 마다 매번 추정 상대 위치와 속도를 보고합니다. 비컨이 보이지 않거나, 신호 측정이 거부되면 아무 것도 보고하지 않습니다. 착륙 목표 추정치는 landing_targett_pose uORB 메시지에 게재됩니다.
# 고급 기체 위치 추정
매개변수 LTEST_MODE을 사용하여 비컨을 정지 상태로 지정한 경우, 비컨 측정을 통해 기체의 위치와 속도 추정치를 개선할 수 있습니다. 기체의 음의 속도를 측정을 비컨의 속도와 결합하여 추정합니다.
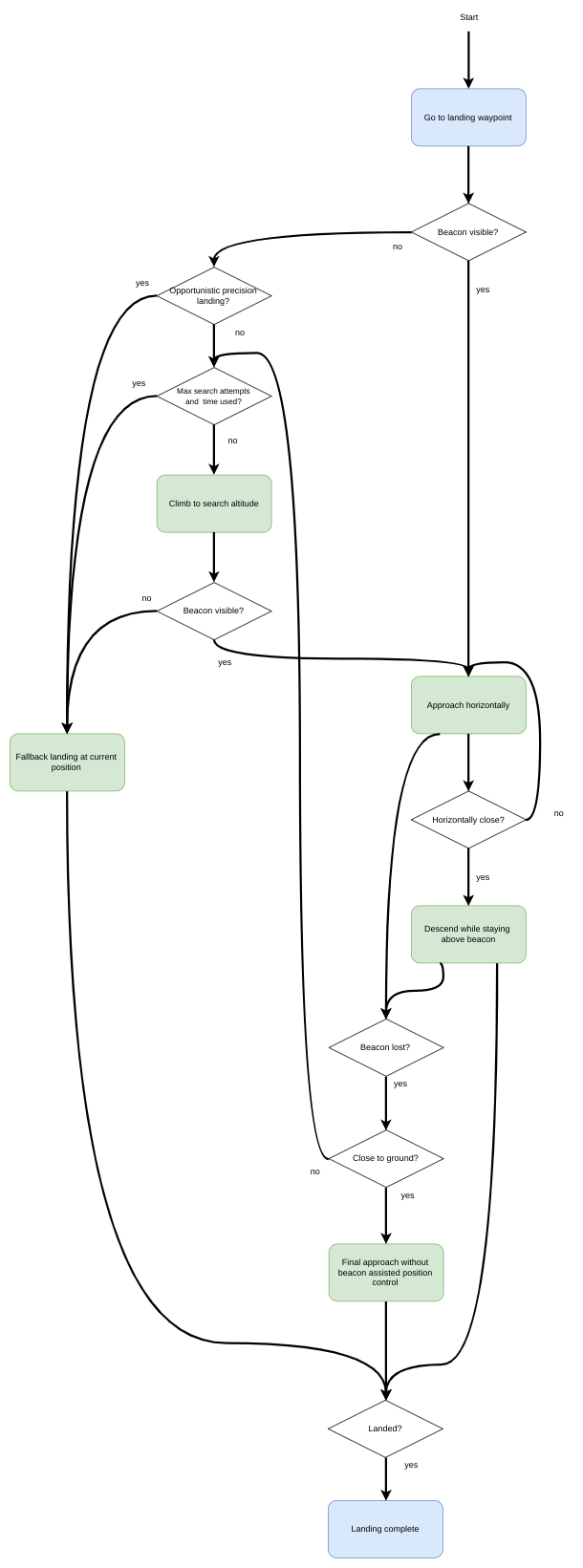
# 정밀 착륙 과정
정밀 착륙 과정은 3단계로 구성됩니다.
수평 접근 방식: 기체는 현재 고도를 유지하면서 비컨에 수평으로 접근합니다. 기체에 대한 비컨 위치가 임계값(PLD_HACC_RAD ) 미만인 경우 다음 단계가 입력됩니다. 이 단계에서 비컨이 일정 시간(PLD_BTOUT 이상의 시간) 동안 잡히지 않으면, 탐색 과정이 시작되거나 (정밀 착륙이 "필수" 모드일 때,) 기체는 일반 착륙을 수행합니다 ( "가능성 탐색" 정밀 착륙 모드일 때).
비컨 위로 하강: 기체는 비컨의 중앙에 위치하여 하강합니다. 이 단계에서 비컨이 일정 시간(
PLD_BTOUT이상의 시간) 동안 잡히지 않으면, 탐색 과정이 시작되거나 (정밀 착륙이 "필수" 모드일 때,) 기체는 일반 착륙을 수행합니다 ( "가능성 탐색" 정밀 착륙 모드일 때).최종 접근 방식: 기체가 지면과 가까울 때 (PLD_FAPPR_ALT), 기체는 비컨의 중앙에 위치하여 하강합니다. 만약 비컨이 이 단계에서 잡히지 않는다면, 기체는 정밀 착륙의 모드와 무관하게 계속 하강합니다.
탐색 과정은 1과 2에서 최대 PLD_MAX_SRCH번 시작합니다.