# 궤도 모드(멀티콥터)

")
궤도 유도 비행 모드를 사용하면 멀티콥터 (또는 멀티 콥터 모드의 VTOL)가 항상 중앙을 향하도록 기본 (opens new window) 요잉으로 원을 그리는 비행하도록 명령할 수 있습니다.

모드를 활성화하고 궤도의 중심 위치, 초기 반경 및 고도를 설정하려면 QGroundControl (또는 기타 호환 가능한 GCS 또는 MAVLink API)이 필요합니다. 활성화되면 기체는 명령된 원 궤적에서 가장 가까운 지점까지 최대한 빠르게 비행하고 계획된 원에서 시계 방향으로 천천히 (1m / s) 궤도를 돌면서 중앙을 향합니다.
궤도를 시작하는 방법에 대한 지침은 FlyView > 궤도 위치 (opens new window) (QGroundControl 가이드)에서 찾을 수 있습니다.
RC
무선 조종기 사용은 선택 사항입니다. RC 제어가 없는 경우 궤도는 위에서 설명한 대로 진행됩니다. RC 제어를 사용하여 모드를 시작할 수 없습니다 (RC를 통해 모드로 전환하면 유휴 상태가됩니다).
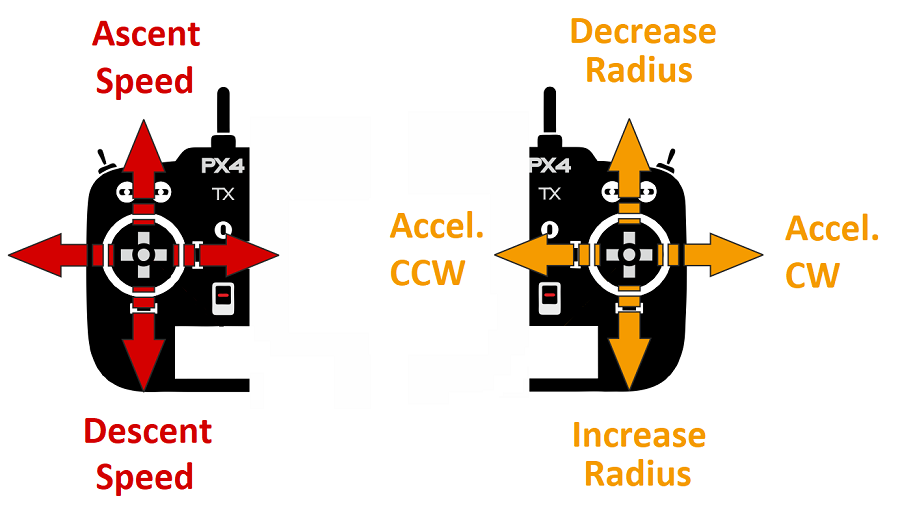
RC 제어를 사용하여 궤도 고도, 반경, 속도 및 궤도 방향을 변경할 수 있습니다.
- 왼쪽 스틱:
- *위/아래 :*는 위치 모드에서와 같이 상승/하강 속도를 제어합니다. 중앙 데드 존에 있으면 현재 고도가 유지됩니다.
- 왼쪽/오른쪽 : 효과 없음.
- 오른쪽 스틱:
- 좌/우 시계 방향/반시계 방향으로 궤도의 가속도를 제어합니다. 중앙에 위치하면 현재 속도가 고정됩니다.
- 최대 속도는 10m/s이며 구심 가속도를 2m/s ^ 2 미만으로 유지하도록 제한됩니다.
- 상/하 궤도 반경을 제어합니다 (더 작게 / 더 크게). 중앙에 위치하면 현재 반경이 유지됩니다.
- 최소 반경은 1m 입니다. 최대 반경은 1m 입니다.
- 좌/우 시계 방향/반시계 방향으로 궤도의 가속도를 제어합니다. 중앙에 위치하면 현재 속도가 고정됩니다.
아래 다이어그램은 모드 동작을 시각적으로 보여줍니다 (모드 2 송신기의 경우).
다른 비행 모드 (RC 또는 QGC 사용)로 전환하여 모드를 중지할 수 있습니다.
# 매개 변수 / 제약 사항
궤도 모드 별 매개 변수는 없습니다.
다음의 제약 사항들은 하드 코딩되어 있습니다.
- 초기 기본 회전은 시계 방향으로 1m/s 입니다.
- 최대 가속도는 2m/s ^ 2로 제한되며, 명령된 지면 속도보다는 명령된 원 궤적을 유지하는 것이 우선입니다 (즉, 가속이 2m/s^ 2를 초과하면 정확한 원을 달성하기 위해 기체가 감속됩니다).
- 최대 반경은 1m 입니다.
# MAVLink 메시지 (개발자)
궤도 모드는 다음 MAVLink 명령을 사용합니다.
- MAV_CMD_DO_ORBIT (opens new window)-지정된 중심점, 반경, 방향, 고도, 속도 및 요 방향 (opens new window)으로 궤도를 시작합니다 (차량은 기본적으로 궤도 중심을 향함).
- ORBIT_EXECUTION_STATUS (opens new window) - 현재 궤도 매개 변수의 GCS를 업데이트하기 위해 궤도 중에 방출되는 궤도 상태입니다 (RC 컨트롤러에 의해 변경 될 수 있음).