# 귀환 모드
")
귀환 모드는 대기(호버링 또는 선회) 또는 착륙 가능한 안전한 목적지까지 장애물이 없는 경로로 기체를 안전하게 복귀하기 위하여 사용합니다.
PX4는 홈 위치, 집결 ( "안전") 지점, 임무 경로 및 임무 착륙 시퀀스 사용을 포함하여 안전한 복귀 경로, 목적지 착륙을 위한 다양한 메커니즘을 제공합니다.
다음 섹션에서는 복귀 유형 , 복귀 고도 및 착륙/도착 동작 설정 방법을 설명합니다. 마지막에는 각 기체 유형에 대한 기본 (미리 구성된) 동작을 설명하는 섹션이 있습니다.
Note
# 복귀 유형(RTL_TYPE)
PX4는 안전한 목적지 또는 착륙지까지 방해받지 않는 경로를 검색하는 네 가지 대체 접근 방식 (RTL_TYPE)을 제공합니다.
- 홈/랠리 포인트 복귀 (
RTL_TYPE = 0) : 안전한 고도로 상승하여 가장 가까운 랠리 포인트 또는 홈 위치로 직접 경로를 통하여 복귀합니다. - 미션 착륙/랠리 포인트 복귀 (
RTL_TYPE = 1) : 안전한 고도로 상승, *홈 위치가 아닌 * 가장 가까운 목적지로 직행 : 랠리 미션 착륙 지점 또는 시작. 임무 착륙 또는 집결 지점이 정의되지 않은 경우에는 직접 경로를 통해 홈으로 복귀합니다. - 미션 경로 복귀 (
RTL_TYPE = 2) : 임무 경로를 사용하고 임무 착륙을 신속하게 진행합니다 (정의된 경우). 임무 착륙이 정의되지 않은 경우 홈으로 빠르게 역회전합니다. 정의된 임무가 없으면 집으로 직접 돌아갑니다 (랠리 포인트는 무시됨). - 가장 가까운 안전한 목적지 복귀 (
RTL_TYPE = 3) : 안전한 고도로 상승하여 가장 가까운 목적지 (홈, 임무 시작 착지 패턴 또는 집결지)로 직접 경로를 통하여 복귀합니다. 목적지가 임무 착륙 패턴인 경우 패턴을 따라 착륙합니다.
각 유형에 대한 자세한 설명은 다음 섹션에서 제공됩니다.
# 홈/랠리 포인트 복귀 유형 (RTL_TYPE = 0)
이 복귀 유형에서 기체의 동작:
- 안전한 복귀 고도 (예상 장애물 위)로 상승합니다.
- 홈 포지션 또는 랠리 포인트 (둘 중 가장 가까운 지점) 로의 직접 경로로 비행합니다.
- 하강 고도에서 착륙 또는 대기 (착륙 매개 변수에 따라 다름).
Note
랠리 포인트가 정의되지 않은 경우 이는 출발지 복귀 (RTL) / 홈으로 복귀 (RTH)과 동일합니다.
# 임무 착륙/랠리 포인트 복귀 유형 (RTL_TYPE = 1)
이 복귀 유형에서 기체의 동작:
- 안전한 복귀 고도 (예상 장애물 위)로 상승합니다.
- 랠리 지점 또는 임무 착륙 패턴의 시작점 (둘 중 가장 가까운 지점)으로 직접 이동합니다. 임무 착륙 또는 집결 지점이 정의되지 않은 경우에는 기체는 직접 경로를 통하여 홈으로 복귀합니다.
- 목적지가 임무 착륙 패턴인 경우 패턴을 따라 착륙합니다.
- 목적지가 집결지 또는 홈인 경우에는 하강 고도에서 착륙또는 대기합니다 (착륙 매개 변수에 따라 다름).
Note
미션 착륙 패턴은 MAV_CMD_DO_LAND_START (opens new window), 하나 이상의 위치 웨이포인트 및 MAV_CMD_NAV_LAND (opens new window)로 구성됩니다.
WARNING
이 유형이 설정되면 PX4는 유효한 착지 패턴이 없는 임무를 거부합니다.
# 임무 경로 복귀 유형 (RTL_TYPE = 2)
이 반환 유형은 임무(정의 된 경우)을 사용하여 안전한 복귀 경로를 제공하고 임무 착륙 패턴 (정의 된 경우)을 사용하여 착륙합니다. 임무가 있지만 임무 착수 패턴이없는 경우 임무는 역방향으로 비행합니다. 랠리 포인트는 무시됩니다.
Note
비행 모드와 임무 및 임무 착륙이 정의 여부에 따라 동작이 매우 복잡해집니다.
착륙 패턴이 있는 임무 :
- 임무 모드 : 임무는 "빨리 감기 모드"(점프, 지연 및 기타 비위치 명령 무시, 선회 및 기타 위치 웨이포인트가 간단한 웨이포인트로 변환 됨)에서 수행한 다음 착륙합니다.
- 임무 모드 이외의 자동 모드 :
- 안전한 복귀 고도 (예상 장애물 위)로 상승합니다.
- 가장 가까운 웨이포인트 (착륙 WP가 아닌 FW의 경우)로 직접 비행하고 웨이포인트 고도로 하강합니다.
- 그 웨이포인트에서 빨리 감기 모드로 임무를 계속 수행합니다.
- 수동 모드:
- 안전한 복귀 고도 (예상 장애물 위)로 상승합니다.
- 착륙 순서 위치로 직접 비행하고 웨이포인트 고도로 하강합니다.
- 임무 착륙 패턴을 사용하는 착륙
착륙 패턴이 없는 임무 :
- 임무 모드:
- 임무 모드 이외의 자동 모드 :
- 가장 가까운 웨이포인트 (착륙 웨이포인트가 아닌 고정익의 경우)로 직접 비행하고 웨이포인트 고도로 하강합니다.
- 미션 모드 (위)에서 복귀 모드가 시작된 것처럼 임무를 반대로 계속 수행합니다.
- 수동 모드: 홈으로 직접 비행하여 착륙합니다.
미션이 정의되지 않은 경우 PX4는 홈 위치에 착륙합니다(랠리 포인트는 무시됨).
복귀 모드에서 임무가 변경되면 위와 동일한 규칙에 따라 새 임무에 따라 행동이 재평가됩니다 (예 : 새 임무에 착륙 순서가없고 임무를 수행중인 경우 임무가 반전 됨).
# 가장 가까운 안전한 대상 복귀 유형 (RTL_TYPE = 3)
이 복귀 유형에서 기체의 동작:
- 안전한 복귀 고도 (예상 장애물 위)로 상승합니다.
- 홈 위치, 미션 착륙 패턴 또는 집결 지점의 가장 가까운 목적지로 직접 이동합니다.
- 목적지가 임무 착륙 패턴인 경우 패턴을 따라 착륙합니다
- 목적지가 홈 위치 또는 집결지인 경우 기체는 하강 고도 (RTL_DESCEND_ALT)로 하강한 다음 착륙 또는 대기합니다.
# 복귀 고도
기체는 목적지까지의 장애물을 피하여 복귀하기 이전에 안전한 고도로 먼저 상승합니다.
고정익 복귀 고도는 매개 변수 RTL_RETURN_ALT를 사용하여 설정됩니다. 멀티 콥터 및 VTOL 차량의 복귀 고도는 RTL_RETURN_ALT 및 RTL_CONE_ANG 매개 변수를 사용하여 구성되며, 이는 목적지 (홈 위치 또는 안전 지점)를 중심으로 한 반 원뿔을 정의합니다.
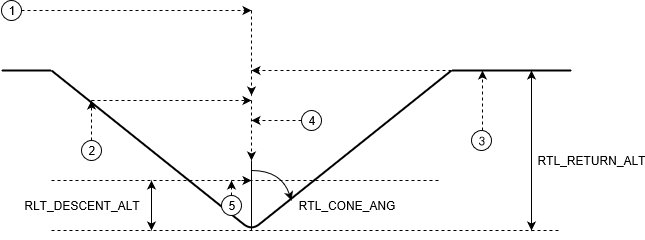
기체가 다음과 같은 경우 :
- RTL_RETURN_ALT (1) 이상에서는 현재 고도로 돌아옵니다.
- 원뿔 아래에서 원뿔 (2) 또는 RTL_DESCEND_ALT (둘 중 더 높은 쪽)와 교차하는 위치를 반환합니다.
- 원뿔 (3)은 RTL_RETURN_ALT에 까지 먼저 상승합니다.
- 원뿔 내에서
- RTL_DESCEND_ALT (4) 이상에서는 현재 고도로 복귀합니다.
- RTL_DESCEND_ALT (5) 아래에서는 먼저
RTL_DESCEND_ALT로 상승합니다.
참고:
- RTL_CONE_ANG이 0도이면 "원뿔"이 없습니다.
- 기체는
RTL_RETURN_ALT(또는 그 이상)으로 복귀합니다.
- 기체는
- RTL_CONE_ANG이 90도이면 기체는
RTL_DESCEND_ALT와 현재 고도 중 높은 고도로 복귀합니다. - 기체는 복귀를 위해 항상 최소 RTL_DESCEND_ALT으로 상승합니다.
# 목적지에 호버링/착륙
임무 착륙을 실행하지 않으면 (예 : 홈 위치 복귀 또는 최인접 안전 목적지 복귀을 실행하는 경우) 기체는 목적지에 도착하여 RTL_DESCEND_ALT 고도로 빠르게 하강합니다.
기체는 지정된 시간 (RTL_LAND_DELAY) 동안 배회후에 착륙합니다. RTL_LAND_DELAY = -1이면 무기한 배회합니다.
# 기체 기본 동작
이 모드는 모든 기체에서 매유 유사한 방식으로 구현되며 (단, 고정익 대기시 호버링하지 않고 원을 그리며) 따라서 동일한 매개 변수를 사용하여 조정됩니다.
그러나 기본 설정은 아래 설명과 같이 기체 유형에 맞게 조정됩니다.
# 멀티콥터 (MC)
멀티콥터는 기본적으로 홈 위치 복귀나 다음 설정을 사용합니다.
- RTL_RETURN_ALT (RTL_CONE_ANG = 0-원뿔 사용 안 함)로 상승합니다.
- 직선과 일정한 고도로 홈 위치로 비행합니다 (현제 고도가 복귀 고도보다 높은 경우 현재 고도로 복귀합니다).
- RTL_DESCEND_ALT 고도까지 빠르게 하강합니다.
- 거의 즉시 착륙합니다. (작은 RTL_LAND_DELAY).
# 고정익 (FW)
고정익은 기본적으로 임무 착륙 복귀 유형을 사용합니다.
- 임무 착륙이 정의된 경우 임무 착륙 시작 지점으로 직접 비행후 착륙합니다.
- 그렇지 않으면, 홈 위치로 직접 비행하고 그 위 반경 NAV_LOITER_RAD에서 선회 비행합니다.
임무 착륙을 따르지 않고 RTL_LAND_DELAY가 -1로 설정된 경우 기체는 착륙 (고정익) 에 설명된 방법으로 착륙합니다.
고정익안전 복귀 고도는 RTL_RETURN_ALT에만 의존합니다 (RTL_CONE_ANG로 정의된 원뿔은 사용되지 않음).
RC 스틱 이동은 무시됩니다.
# 수직이착륙기
고정익은 기본적으로 임무 착륙 복귀 유형을 사용합니다.
- 임무 착륙이 정의된 경우 임무 착륙 시작점으로 직접 비행후 착륙합니다.
- 그렇지 않으면, 홈 위치로 직접 비행하고 멀티콥터 모드로 전환후 착륙합니다.
Note
임무 착륙중이 아니면 고정익 모드의 VTOL은 착륙 직전에 항상 멀티콥터로 전환됩니다 (NAV_FORCE_VT 무시).
# 매개변수
RTL 매개 변수는 매개변수 정의 > 복귀 모드에 기술되어 있습니다 (아래에 요약되어 있음).
| 매개변수 | 설명 |
|---|---|
| RTL_TYPE | 복귀 메커니즘 (경로 및 목적지). |
0 : 직접 경로를 통해 집회 지점 또는 홈(둘 중 가장 가까운 곳)으로 복귀합니다.
1 : 복귀 직접 경로를 통해 집결지 또는 임무 착륙 패턴 시작 지점 (둘 중 가장 가까운 지점) 임무 착륙 또는 집결 지점이 모두 정의되지 않은 경우에는 직접 경로를 통해 홈으로 복귀합니다. 목적지가 임무 착륙 패턴인 경우 착륙 패턴을 따릅니다.
2 : 착륙 패턴이 정의 된 경우 착륙까지 빨리 감기 경로를 사용하고 그렇지 않으면 홈으로 빠르게 되감기합니다. 랠리포인트를 무시합니다. 임무 계획이 정의되지 않은 경우 홈으로 직접 비행합니다.
3 : 가장 가까운 목적지 (집, 임무 시작 착륙 패턴 또는 안전 지점)까지 직접 경로를 통해 복귀합니다. 목적지가 임무 착륙 패턴인 경우 패턴을 따라 착륙합니다. |
| RTL_RETURN_ALT | RTL_CONE_ANG이 0 인 경우 고도를 미터 단위 (기본값 : 60m)로 반환합니다. 이미 이 값을 초과하면 기체는 현재 고도로 복귀합니다. |
| RTL_DESCEND_ALT | 기체가 더 높은 복귀 고도에서 감속하거나 초기 하강을 중지할 최소 복귀 고도 및 고도 (기본값 : 30m) |
| RTL_LAND_DELAY | 착륙 전 RTL_DESCEND_ALT에서 호버링하는 시간(기본값 : 0.5 초) - 기본적으로 이 시간은 짧아서 기체는 감속후 즉시 착륙합니다. -1로 설정하면 착륙하지 않고 RTL_DESCEND_ALT에서 배회합니다. 이 지연은 랜딩 기어가 배치될 시간을 설정합니다. (자동으로 동작함). |
| RTL_MIN_DIST | 홈 위치에서 "원뿔"에 지정된 복귀 고도까지 상승을 시작하는 최소 수평 거리. 차량이 홈까지의이 거리보다 수평으로 가까우면 먼저 RTL_RETURN_ALT로 상승하지 않고 현재 고도 또는 RTL_DESCEND_ALT (둘 중 더 높은 쪽)고도로 복귀합니다. |
| RTL_CONE_ANG | 기체 RTL 리턴 고도를 정의하는 원뿔의 반각. 값 (도) : 0, 25, 45, 65, 80, 90. 0은 "원뿔 없음" (항상 RTL_RETURN_ALT 이상에서 반환)이고, 90은 차량이 현재 고도 또는 RTL_DESCEND_ALT (둘 중 더 높은 고도)에서 복귀함을 나타냅니다. |
| COM_RC_OVERRIDE | Controls whether stick movement on a multicopter (or VTOL in MC mode) causes a mode change to Position mode (except when vehicle is handling a critical battery failsafe). 자동 모드와 오프보드 모드에 대해 별도로 활성화할 수 있으며, 기본적으로 자동 모드에서 활성화됩니다. |
| COM_RC_STICK_OV | The amount of stick movement that causes a transition to Position mode (if COM_RC_OVERRIDE is enabled). |
| NAV_LOITER_RAD | [Fixed Wing Only] The radius of the loiter circle (at RTL_LAND_DELAY. |