# 飞行终止配置
飞行终止故障保护动作可由安全检查(例如任何载具类型或任何飞行模式下的 RC 丢失、违反地理围栏等)或者故障检测器触发。
当飞行终止激活时,PX4 同时关闭所有控制器,并将所有 PWM 输出设置为其故障保护值。
根据所连接的设备,PWM 故障保护输出可以用来完成以下动作:
- 展开降落伞。
- 伸展可伸缩起落架。
- 将连接了 PWM 的云台移动到安全的方向(或将它回收)以保护摄像机。
- 触发一个重启装置,比如安全气囊。
- 触发警报。
飞行终止是无法取消的。 在飞行终止触发后,您应尽快拔下电池。 您需要在重启载具或重新上电后才能再次使用。
PX4 不能感知接了那些安全设备 - 它只是将一组预先定义的 PWM 值用于其输出。
提示
失效保护值被应用到终止时的所有输出。 无法配置时基触发的电机或者特定的安全设备。
注解
这不是一个独立的 飞行终止系统。 如果断电或者自驾仪完全失控,则不会出发失效保护设备。
# 硬件配置
任何 安全设备 (例如一个 降落伞)可以使用因更改 PWM 值而触发的降落伞, 并且可以连接到任意空闲的 PWM 端口(MAIN和 AUX)。
注解
如果您使用 Pixhawk 系列飞控板, 您必须单独为舵机单独供电(通常供电来自 5V BEC, 通常来自电调 BEC)。
# 软件配置
安全 主题解释了如何将 飞行终止 设置为 失效保护动作 作为特定故障安全检查。
如果载具翻转(超过一定姿态)或外部自动触发系统(ATS)检测到故障,则故障检测器也可以(可选)通过配置来触发飞行终止,如下所示:
- 通过设置 CBRK_FLIGHTTERM=0 来启用故障检测器。
- 安全> 故障检测 > 姿态触发 解释了如何通过配置姿态限制触发 飞行终止。 :::note 在 起飞期间 过分的状态将会触发 锁定 (制动电机,但不会启动降落伞) 而不是飞行终止。 无论
CBRK_FLIGHTTERM为何值,此选项始终启用。 ::: - 通过安全 > 外部自动触发系统(ATS)可以配置外部触发系统。
最后,设置任意电机的 PWM_AUX_FAILn and PWM_MAIN_FAILn PWM值。
- 将 PWM_MAIN_DISn 设置为设备的“OFF”PWM值。
- 将 PWM_MAIN_FAILn 设置为设备的“ON”PWM值。
下图显示了飞行终止的逻辑流程。
- 将 PWM_AUX_DISn 设置为设备的“OFF”PWM值。
- 将 PWM_AUX_FAILn 设置为设备的“ON”PWM值。
最后,设置任意电机的 PWM_AUX_FAILn 和 PWM_MAIN_FAILn PWM 值。
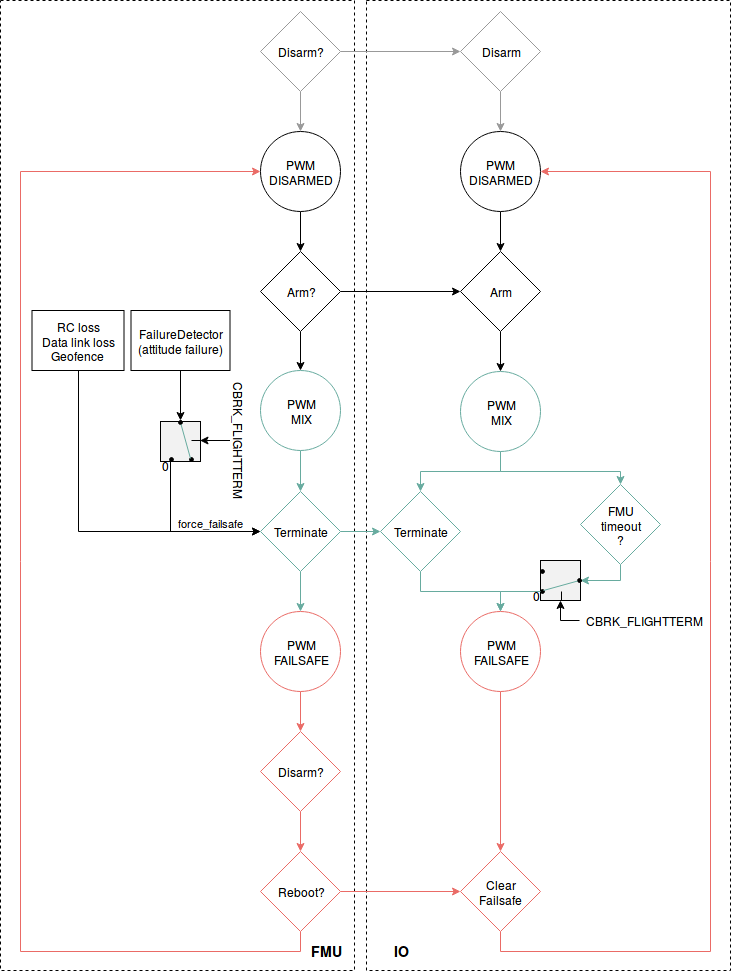
# 逻辑图解
下图显示了飞行终止的逻辑流程。