# 비행 중단 설정
비행 중단 failsafe는 안전 점검</1>(예. 기체 유형과 비행 모드가 무엇이든 RC 연결 끊김, geofence를 벗어남 등이 발생할 때)또는 Failure Detector에 의해 작동합니다.
비행 중단이 활성화되면, PX4는 동시에 모든 컨트롤러를 중단하고 모든 PWM출력값을 failsafe 값으로 변경합니다.
연결된 장치에 따라 PWM 안전장치 출력은 아래와 같이 활용할 수 있습니다.
- 낙하산 펼치기.
- 랜딩기어 펼치기.
- 카메라를 보호하기 위해 PWM방식으로 연결된 짐벌을 안전 각도(또는 수납 위치) 로 움직이기.
- 에어백 같은 팽창 장비 가동하기.
- 알람 울리기.
비행 중단을 취소하고 되돌리는 방법은 없습니다. 비행 중단이 시행되면 가능한 빨리 배터리를 분리하십시오. 기체를 다시 사용하기 전에 재부팅하거나 전원을 껐다 켜야 합니다.
PX4는 어떤 안전 장치가 장착되어 있는지 알지 못합니다. 미리 정의된 PWM 값 세트를 출력에 적용하기만 하면 됩니다.
TIP
Failsafe 값은 종료시 모든 출력에 적용됩니다. 모터 또는 특정 안전 장치의 독립적인 시간 기반 (또는 기타) 트리거링을 구성하는 방법은 없습니다.
Note
이것은 독립적인 항공 종료 시스템이 아닙니다. 전원이 끊기거나 자동조종장치가 완전히 충돌하면 안전 장치가 작동하지 않습니다.
# 하드웨어 설정
PWM 값을 변경하여 트리거 기능한 모든 안전 장치(예 : 낙하산)를 사용할 수 있으며, 모든 빈 PWM 포트(MAIN과 AUX)에 연결할 수 있습니다.
Note
Pixhawk 시리즈 보드를 사용하는 경우 서보 레일에 별도로 전원을 공급하여야 합니다 (예 : ESC에서도 제공되는 5V BEC).
# 소프트웨어 설정
안전 장치에 연결된 각각의 MAIN포트 출력에 대해 다음을 설정하십시오. "n"은 PWM 포트 번호입니다:
안전 장치에 연결된 각각의 AUX포트 출력에 대해 다음을 설정하십시오. "n"은 PWM 포트 번호입니다:
- CBRK_FLIGHTTERM=0을 설정하여 고장 감지기를 활성화하십시오.
- Safety > Failure Detector > Attitude Trigger는 비행 중단을 시작하는 한계 attitude를 구성하는 방법을 설명합니다. 참고 이륙중의 과한 attitude는 비행 중단 대신 lockdown(모터를 정지시키지만 낙하산을 발사하지 않음)을 시작합니다. lockdown은
CBRK_FLIGHTTERM의 값에 관계없이 항상 활성화됩니다. ::: - Safety > External Automatic Trigger System (ATS)은 외부 트리거 시스템을 설정하는 방법에 대해 설명합니다.
마지막으로, 다른 모터에 대해 PWM_AUX_FAILn과 PWM_MAIN_FAILn의 PWM 값을 설정하십시오.
- PWM_MAIN_DISn을 장치의 "OFF" PWM값으로 설정
- PWM_MAIN_FAILn을 장치의 "ON" PWM값으로 설정
아래의 다이어그램은 비행 중단과 관련된 논리적 흐름을 보여 줍니다.
- PWM_AUX_DISn을 장치의 "OFF" PWM값으로 설정
- PWM_AUX_FAILn을 장치의 "ON" PWM값으로 설정
마지막으로, 모든 모터에 대해 PWM_AUX_FAILn 및 PWM_MAIN_FAILn PWM 값을 설정합니다.
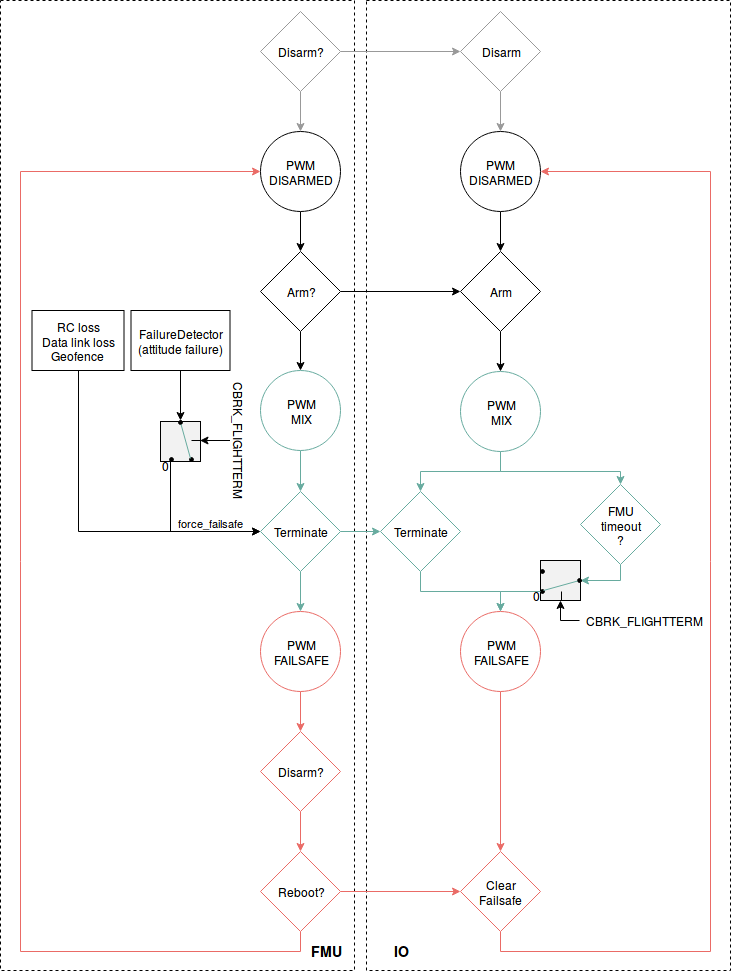
# 로직 다이어그램
아래의 다이어그램은 비행 중단과 관련된 논리적 흐름을 나타냅니다.