# 디버그 값 송수신
소프트웨어 개발시에 개별 중요 숫자를 출력하는 경우가 종종 있습니다. 이 때가 보통 MAVLink 패킷이 들어올 때 NAMED_VALUE_FLOAT, DEBUG, DEBUG_VECT 패킷을 활용할 수 있는 경우입니다.
# MAVLink 디버그 메시지와 uORB 주제 간의 매핑
MAVLink 디버그 메시지는 uORB 주제로/에서 번역됩니다. MAVLink 디버그 메시지를 보내거나 받으려면, 해당 주제를 각각 게시하거나 구독해야 합니다. 다음은 MAVLink 디버그 메시지와 uORB 주제 간의 매핑을 요약한 표입니다.
| MAVLink 메시지 | uORB 주제 |
|---|---|
| NAMED_VALUE_FLOAT | debug_key_value |
| DEBUG | debug_value |
| DEBUG_VECT | debug_vect |
# 튜토리얼: 문자열 / 부동 소수점 쌍 보내기
이 튜토리얼은 관련 uORB 주제 debug_key_value를 사용하여 MAVLink 메시지 NAMED_VALUE_FLOAT를 전송하는 방법을 설명합니다.
이 자습서의 코드는 다음에서 사용할 수 있습니다.
- 튜토리얼 코드 디버그 (opens new window)
- 보드 구성에서 MAVLink 디버그 앱(px4_mavlink_debug)의 주석 처리를 제거하여 튜토리얼 앱을 활성화 (opens new window)합니다.
디버그 게시를 설정에 필요한 것은 아래의 코드입니다. 먼저 헤더 파일을 추가합니다.
#include <uORB/uORB.h>
#include <uORB/topics/debug_key_value.h>
#include <string.h>
그런 다음 디버그 값 주제를 광고합니다(공개된 다른 이름에 대해 하나의 광고로 충분함). 이 코드를 메인 루프 앞에 추가합니다.
/* advertise debug value */
struct debug_key_value_s dbg;
strncpy(dbg.key, "velx", sizeof(dbg.key));
dbg.value = 0.0f;
orb_advert_t pub_dbg = orb_advertise(ORB_ID(debug_key_value), &dbg);
이렇게 하면 메인 루프에서 메시지 전송은 상당히 간단해 집니다.
dbg.value = position[0];
orb_publish(ORB_ID(debug_key_value), pub_dbg, &dbg);
WARNING
Multiple debug messages must have enough time between their respective publishings for Mavlink to process them. 이는 코드가 여러 디버그 메시지 게시 사이에 대기하거나, 각 함수 호출 반복에서 메시지를 대체하는 것을 의미합니다.
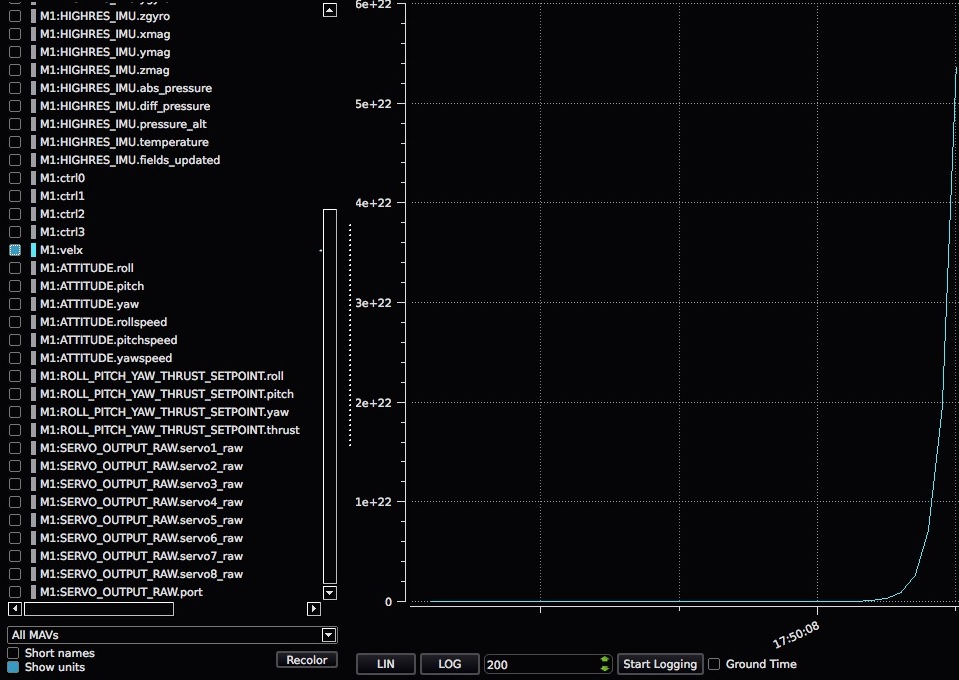
QGroundControl의 결과는 실시간 플롯에서 다음과 같습니다.
# 튜토리얼: 문자열 / 부동 소수점 쌍 수신
다음 코드는 이전 튜토리얼에서 전송된 velx 디버그 변수를 수신하는 방법을 설명합니다.
먼저 debug_key_value 주제를 구독하십시오.
#include <poll.h>
#include <uORB/topics/debug_key_value.h>
int debug_sub_fd = orb_subscribe(ORB_ID(debug_key_value));
[...]
이후 토픽을 폴링 처리하십시오:
[...]
/* one could wait for multiple topics with this technique, just using one here */
px4_pollfd_struct_t fds[] = {
{ .fd = debug_sub_fd, .events = POLLIN },
};
while (true) {
/* wait for debug_key_value for 1000 ms (1 second) */
int poll_ret = px4_poll(fds, 1, 1000);
[...]
debug_key_value 주제에서 새 메시지를 사용할 수 있는 경우 velx와 다른 키를 가진 메시지를 삭제하기 위하여, 키 속성을 기준으로 메시지를 필터링하는 것을 잊지 마십시오.
[...]
if (fds[0].revents & POLLIN) {
/* obtained data for the first file descriptor */
struct debug_key_value_s dbg;
/* copy data into local buffer */
orb_copy(ORB_ID(debug_key_value), debug_sub_fd, &dbg);
/* filter message based on its key attribute */
if (strcmp(_sub_debug_vect.get().key, "velx") == 0) {
PX4_INFO("velx:\t%8.4f", dbg.value);
}
}
}