# 거리 센서 및 RTK GPS가 장착 된 DJI Flame Wheel 450 (Pixhawk 3 Pro)
*DJI® Flame Wheel F450 * Quadcopter는 아마추어 항공 사진, 1 인칭 시점 애플리케이션 및 일반적인 비행 엔터테인먼트를 위해 설계되었습니다. 아래의 조립 방법은 Pixhawk 3 Pro 비행 컨트롤러와 함께 프레임을 사용하기위한 조립 방법과 설정 방법을 설명합니다. 정밀한 위치 지정을위한 RTK GPS와 거리 센서가 포함되어 있습니다.
주요 정보:
- 프레임: DJI Flame Wheel 450
- 비행 컨트롤러: Pixhawk 3 Pro
- **위치정보: ** RTK GPS


# 부품 목록
- 비행 컨트롤러: Pixhawk 3 Pro
- 프레임: DJI Flamewheel 450 (opens new window)
- 모토: 3DR Iris Plus 950kv rebranded T-Motors MN2213
- 전기변속기: Hobbywing XRotor 35A Micro 3-6S BLHeli
- 블레이드: Graupner 10"x5" (M6와 호환되도록 이 어댑터 (opens new window)를 인쇄해야합니다.)
- 거리 센서: Lidar-Lite V3
- GPS: Here+ RTK GPS
- 텔레메트리: 3DR 텔레메트리
- 배터리: Roxxy LiPo - 4S, 4000mAh
또한, FrSky X4R-SB 3/16ch 2.4Ghz 수신기와 FrSky Taranis 컨트롤러를 사용합니다. 이번 조립에는 동일한 블레이드를 사용하는 경우 지퍼 타이, 양면 테이프, 납땜 인두 및 3D 프린터도 필요합니다. GPS 마스트는 Intel Aero에서 재사용되었습니다.
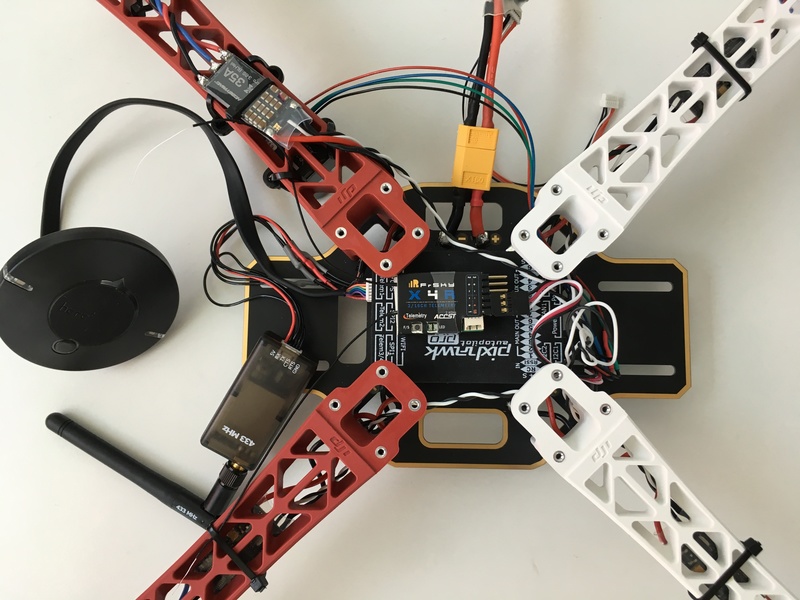
Pixhawk 3 Pro는 내부 IMU가 이미 축축되어 있기 때문에 양면 테이프를 사용하여 부착 할 수 있습니다.
이 설정에서는 자동 조종 장치가 180도 회전되어 SD 카드에 접근이 더욱 용이합니다. 그러나, 베이스 플레이트를 180도 돌리면, 비행 컨트롤러 보드를 전면에 장착할 수 있습니다. 두 방법 모두 가능하나, QGroundControl에서 보드 회전의 설정을 확인하여야 합니다.
# 배선
Pixhawk 3 Pro의 일반 핀아웃은 여기 (opens new window)에서 조회할 수 있습니다.
# 3DR 텔레메트리
3DR 텔레메트리는 Pixhawk 3 Pro가 사용하는 JST GH 커넥터와 함께 제공되지 않습니다. 핀아웃은 동일하게 유지되며 플러그만 변경하면됩니다. Pixhawk 3 Pro의 Telem 1 포트를 사용하세요.
| 핀 | Pixhawk 3 Pro Telem 1 | 3DR 텔레메트리 |
|---|---|---|
| 1 | VCC | VCC |
| 2 | TX | RX |
| 3 | RX | TX |
| 4 | CTS | CTS |
| 5 | RTS | RTS |
| 6 | GND | GND |
# Lidar-Lite V3
Lidar Lite V3와 Pixhawk 3 Pro I2C 1 포트의 핀아웃은 다음과 같습니다.
| 핀 | Pixhawk 3 Pro I2C 1 | Lidar Lite V3 |
|---|---|---|
| 1 | VCC | VCC |
| 2 | SCL | - (Power enable) |
| 3 | SDA | - (Mode control) |
| 4 | GND | SCL |
| 5 | - | SDA |
| 6 | - | GND |
# Here+ RTK GPS
Here + GPS는 Pixhawk 2에 적합한 8 핀 커넥터와 함께 제공됩니다. Here + GPS는 Pixhawk 2에 적합한 8 핀 커넥터와 함께 제공됩니다. 추가 핀은 안전 버튼용이며 필요한 경우 부착 할 수 있습니다. 핀아웃에 대한 상세한 내용은 17 페이지의 이 문서 (opens new window)에서 확인하십시오.

| 핀 | Here+ GPS | 핀 | Pixhawk 3 Pro GPS |
|---|---|---|---|
| 1 | VCC_5V | 1 | VCC |
| 2 | GPS_RX | 2 | GPS_TX |
| 3 | GPS_TX | 3 | GPS_RX |
| 4 | SCL | 4 | SCL |
| 5 | SDA | 5 | SDA |
| 6 | BUTTON | - | - |
| 7 | BUTTON_LED | - | - |
| 8 | GND | 6 | GND |
# 설정
QGroundControl에서 쿼드콥터를 설정법에 대한 일반 문서는 기본 구성을 참고하십시오. 특정한 설정에 관련된 지침이 아래에서 제공됩니다.
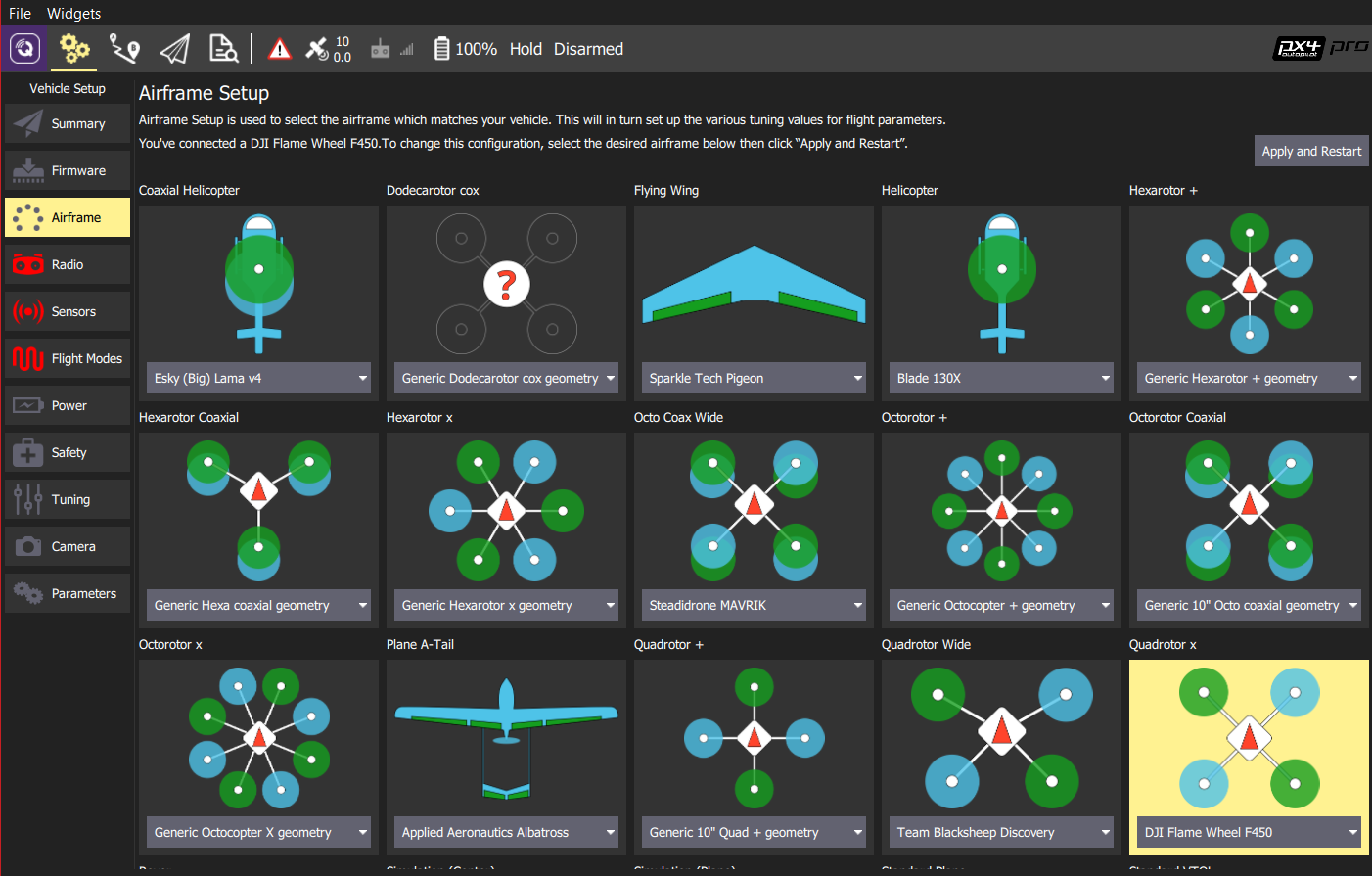
# 기체
QGC > Airframe > Quadrotor x에서 기체 DJI Flame Wheel 450을 선택합니다.
# RTK GPS
RTK GPS는 플러그 앤 플레이입니다. 자세한 내용은 여기를 참조하십시오.
# Lidar-Lite
Lidar-Lite V3 (I2C를 통해 연결됨)를 활성화하려면 SENS_EN_LL40LS 매개 변수를 I2C로 설정해야합니다.
이 작업은 아래와 같이 QGroundControl 매개 변수 (opens new window)에서 수행할 수 있습니다.
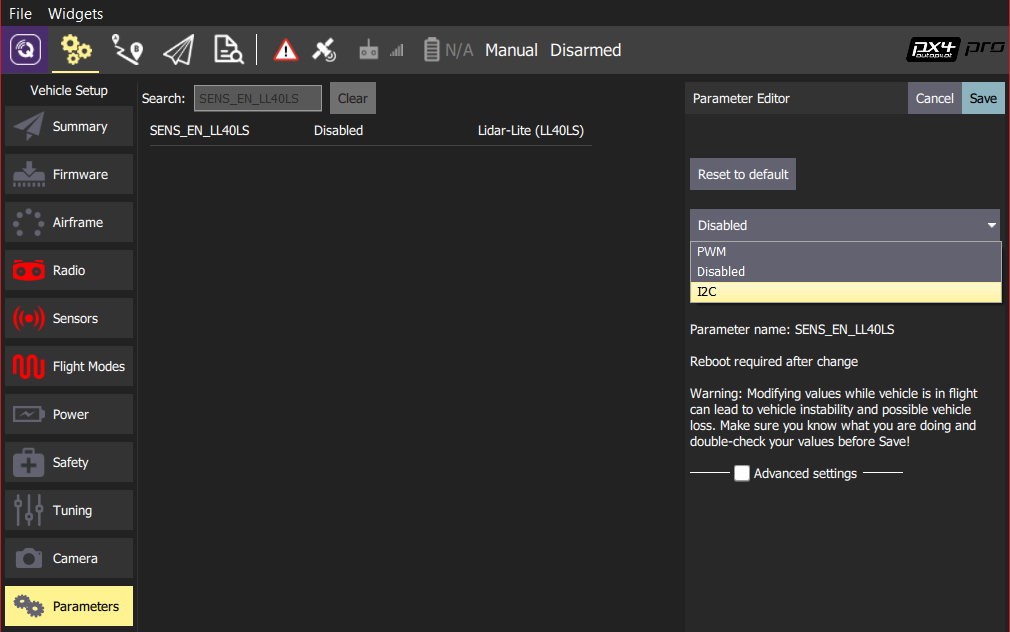
Note
SENS_EN_LL40LS를 설정한 다음에는 비행 컨트롤러를 재부팅하여야 합니다.
# 기타
아래의 매개 변수도 설정하십시오.
EKF2_HGT_MODE = 2: Lidar-Lite가 고도값의 소스로 사용되는 지 확인합니다.MAV_PROTO_VER = 2: MAVLink 프로토콜 버전 2 사용CBRK_IO_SAFETY = 22027: 안전 버튼 비활성화EKF2_GPS_POS_X,EKF2_GPS_POS_Y,EKF2_GPS_POS_Z: 보드 (NED 좌표)를 기준으로 GPS 장치 오프셋을 설정합니다.