# HolyBro QAV250 + Pixhawk4-Mini 조립
Holybro Pixhawk 4 Mini QAV250 키트 (opens new window)는 Pixhawk 4을 조립 학습에 최적의 키트입니다. Holybro Pixhawk 4 Mini QAV250 키트 (opens new window)는 Pixhawk 4을 조립 학습에 최적의 키트입니다. FPV 지원 유무에 따라 키트가 조금씩 달라집니다.
키트 조립법과 QGroundControl의 PX4 설정법을 설명합니다.
주요 정보
- 프레임: Holybro QAV250
- 비행 컨트롤러: Pixhawk 4 Mini
- 조립 시간 (예상): 3.5시간 (프레임 조립에 2시간, 오토파일럿 설치 및 설정에 1.5시간)

# 간단한 가이드
Pixhawk 4 Mini QAV250 키트 시작 안내서 (opens new window)
# 부품 명세서
Holybro Pixhawk 4 Mini QAV250 키트 (opens new window)에는 필수 구성 요소가 포함되어 있습니다.
- Pixhawk 4 Mini
- Holybro Telemetry Radio V3 (opens new window)
- 전원 모듈 holybro
- 조립된 ESC 전원 관리 보드
- 모터- DR2205 KV2300
- 5 인치 플라스틱 프로펠러
- 탄소 섬유 250 기체 (하드웨어 포함)
- Foxer 카메라
- Vtx 5.8ghz
또한, 배터리와 수신기 및 수신기와 호환되는 송신기가 필요합니다. 이 조립 예제에서는 다음의 부품들을 사용합니다.
- Receiver: FrSSKY D4R-II (opens new window)
- 배터리: 4S 1300 mAh (opens new window)
# 하드웨어
프레임 및 자동 조종 장치 설치를 위한 하드웨어들 입니다.
# 프레임 QAV250
| 설명 | 수량 |
|---|---|
| 유니 바디 프레임 플레이트 | 1 |
| 비행 컨트롤러 커버 플레이트 | 1 |
| PDB | 1 |
| 카메라 플레이트 | 1 |
| 35mm 스탠드 오프 | 6 |
| 비닐 나사 및 너트 | 4 |
| 15mm 강철 나사 | 8 |
| 강철 너트 | 8 |
| 7mm 강철 나사 | 12 |
| 벨크로 배터리 스트랩 | 1 |
| 배터리용 폼 | 1 |
| 착륙 패드 | 4 |

# 전자부품
| 설명 | 수량 |
|---|---|
| 모터- DR2205 KV2300 | 4 |
| 조립된 ESC 전원 관리 보드 | 4 |
| Holybro 전원 모듈 | 1 |
| Fr-sky D4R-II 수신기 | 1 |
| Pixhawk 4 mini | 1 |
| Holybro GPS Neo-M8N | 1 |
| Holybro Holybro Telemetry Radio V3 (opens new window) | 1 |
| 배터리 lumenier 1300 mAh 4S 14.8V | 1 |
| Vtx 5.8ghz | 1 |
| FPV 카메라 (전체 키트 전용) | 1 |
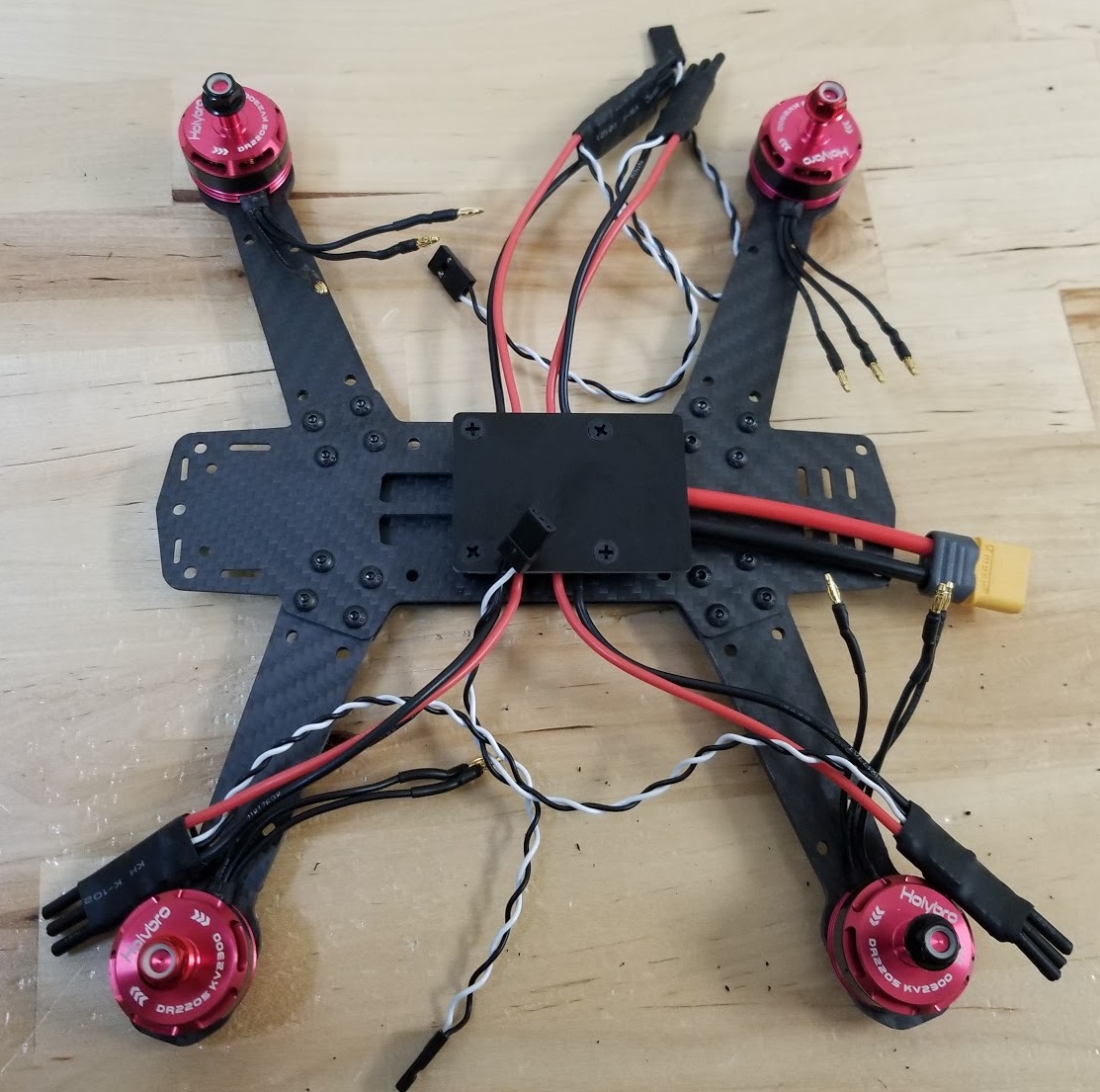
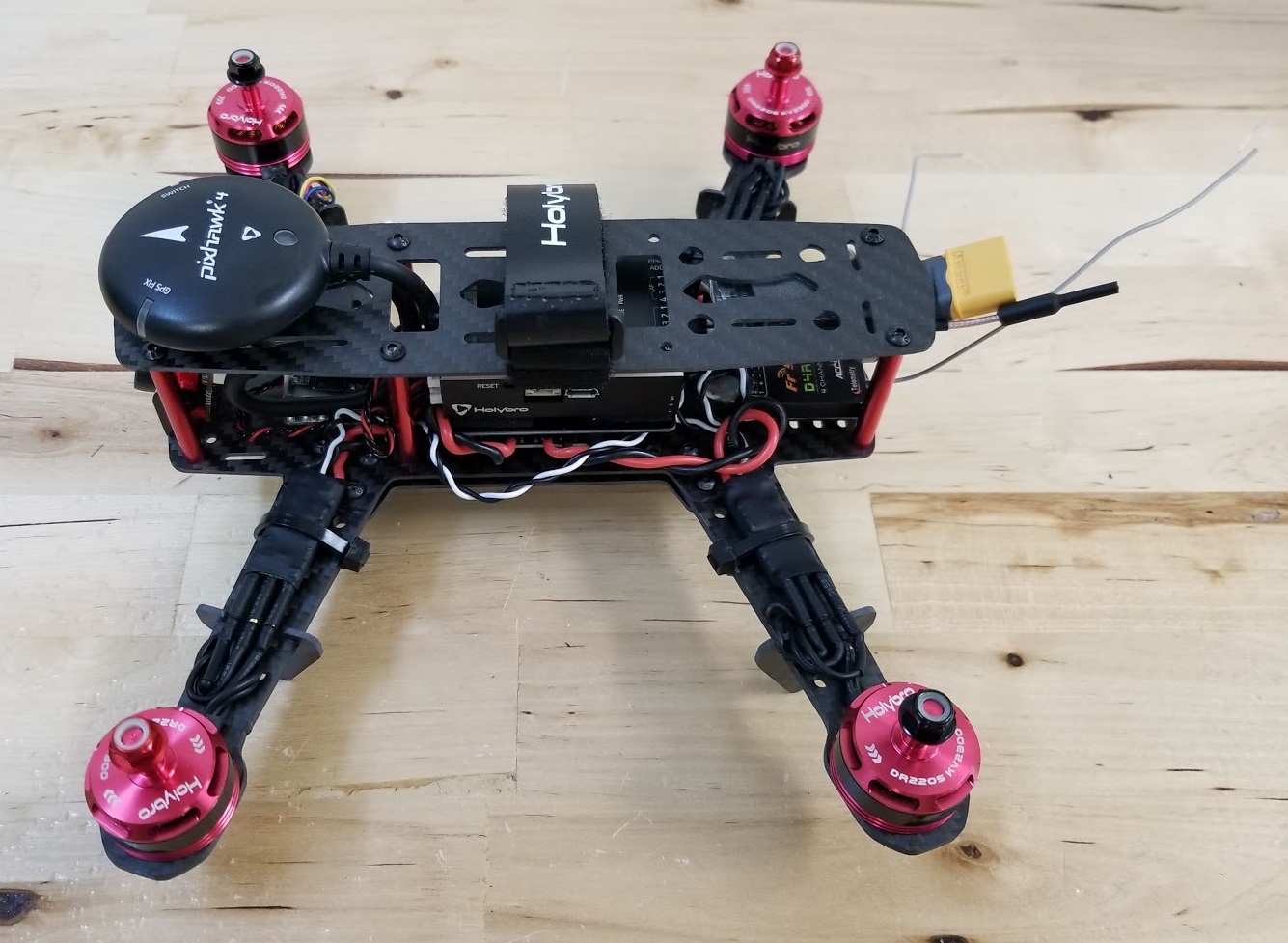
아래의 이미지는 프레임과 전자 부품들을 나타냅니다.

# 조립
프레임 조립 예상 시간은 2시간이며, QGroundControl에서 자동 조종 장치를 설치및 기체 설정 예상 시간은 1.5시간입니다.
# 필요한 공구
조립시에 필요한 공구들입니다.
- 2.0mm 육각 스크류드라이버
- 3mm Phillips 스크류드라이버
- Wire 커터
- 정밀 트위저

# 프레임 조립
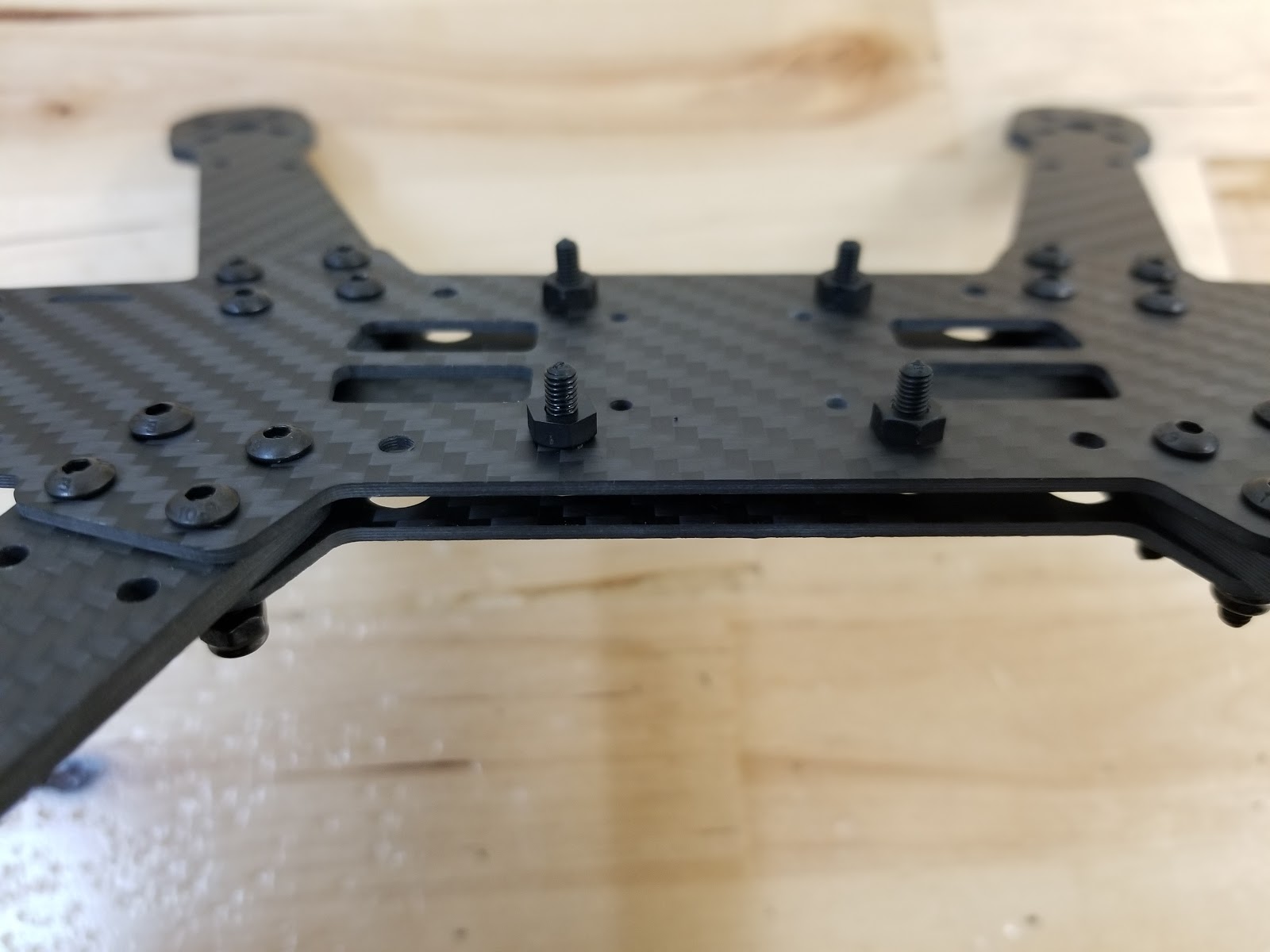
그림과 같이 15mm 나사를 사용하여 암을 버튼 플레이트에 부착합니다.

짧은 판을 팔 위에 올려 놓습니다.

15mm 나사에 너트를 끼웁니다 (다음 단계 참조).
표시된 구멍에 플라스틱 나사를 삽입합니다 (차량이 완성되면 프레임의이 부분이 아래를 향함을 유의하십시오).

나사에 플라스틱 너트를 추가합니다 (그림과 같이 뒤집음).
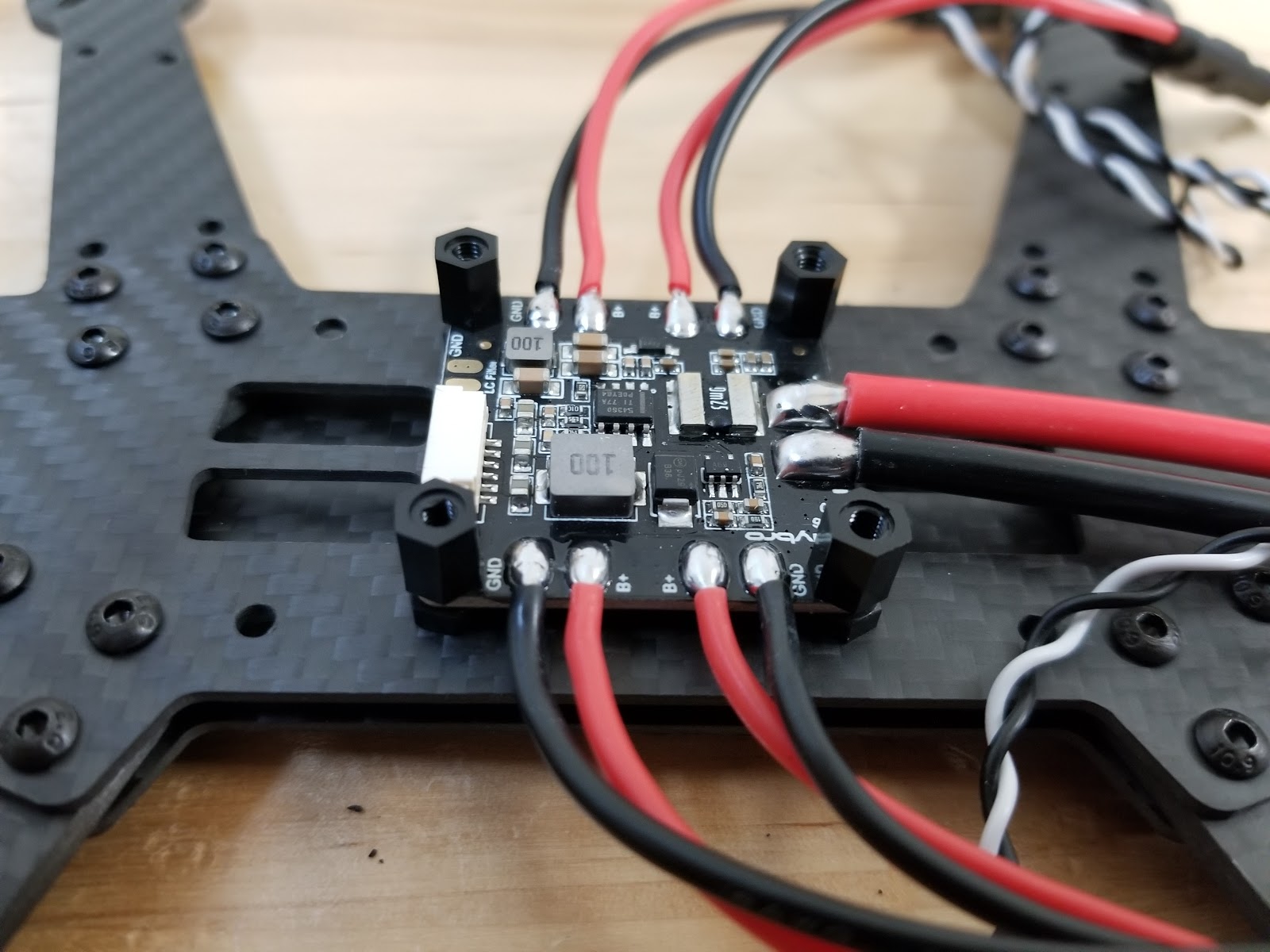
전원 모듈을 플라스틱 나사 위로 내린 다음 플라스틱 격리 애자를 추가합니다.
비행 컨트롤러 플레이트를 스탠드 오프에 놓습니다 (전원 모듈 위).
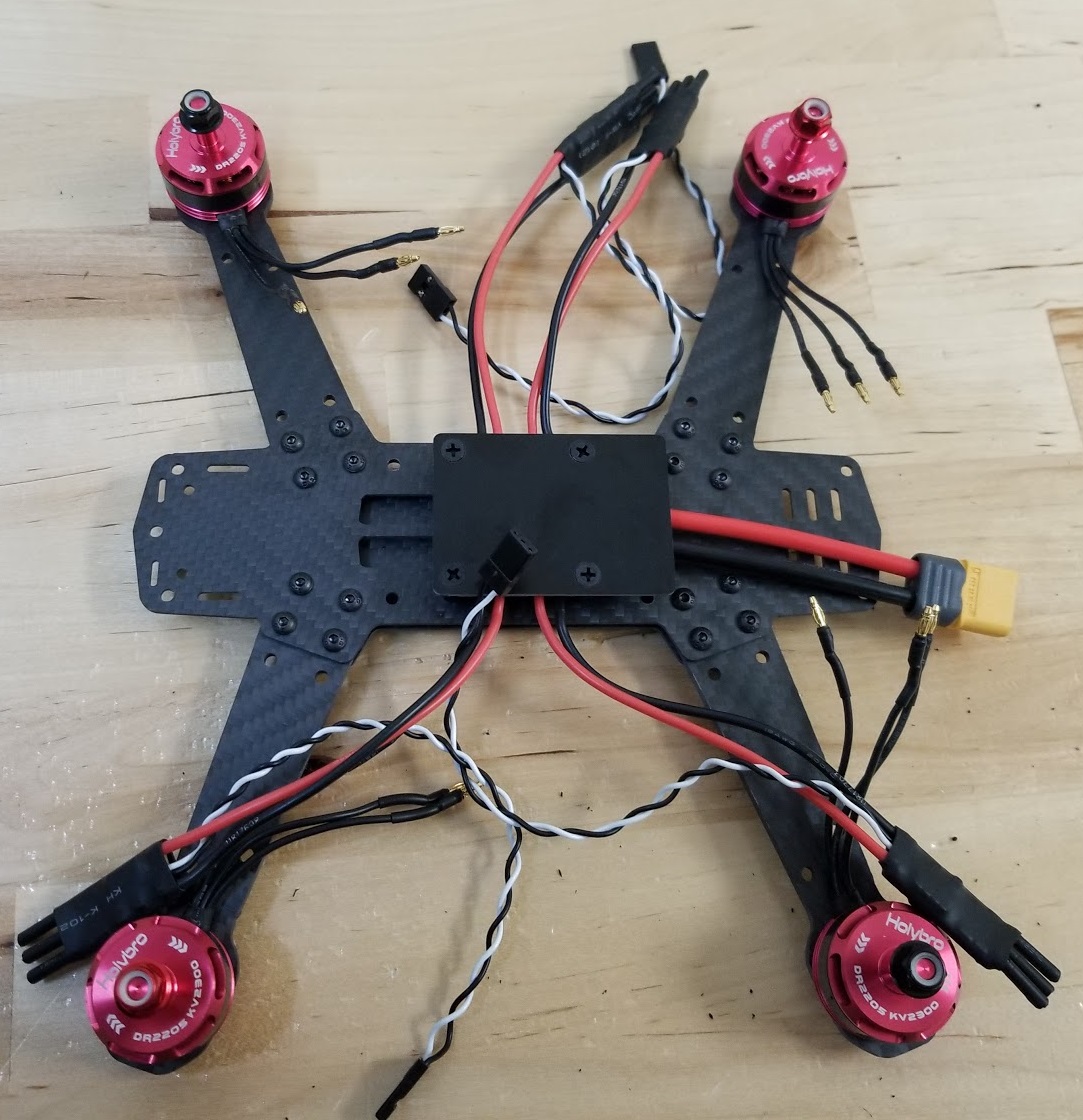
모터를 부착합니다. 모터에는 회전 방향을 나타내는 화살표가 있습니다.
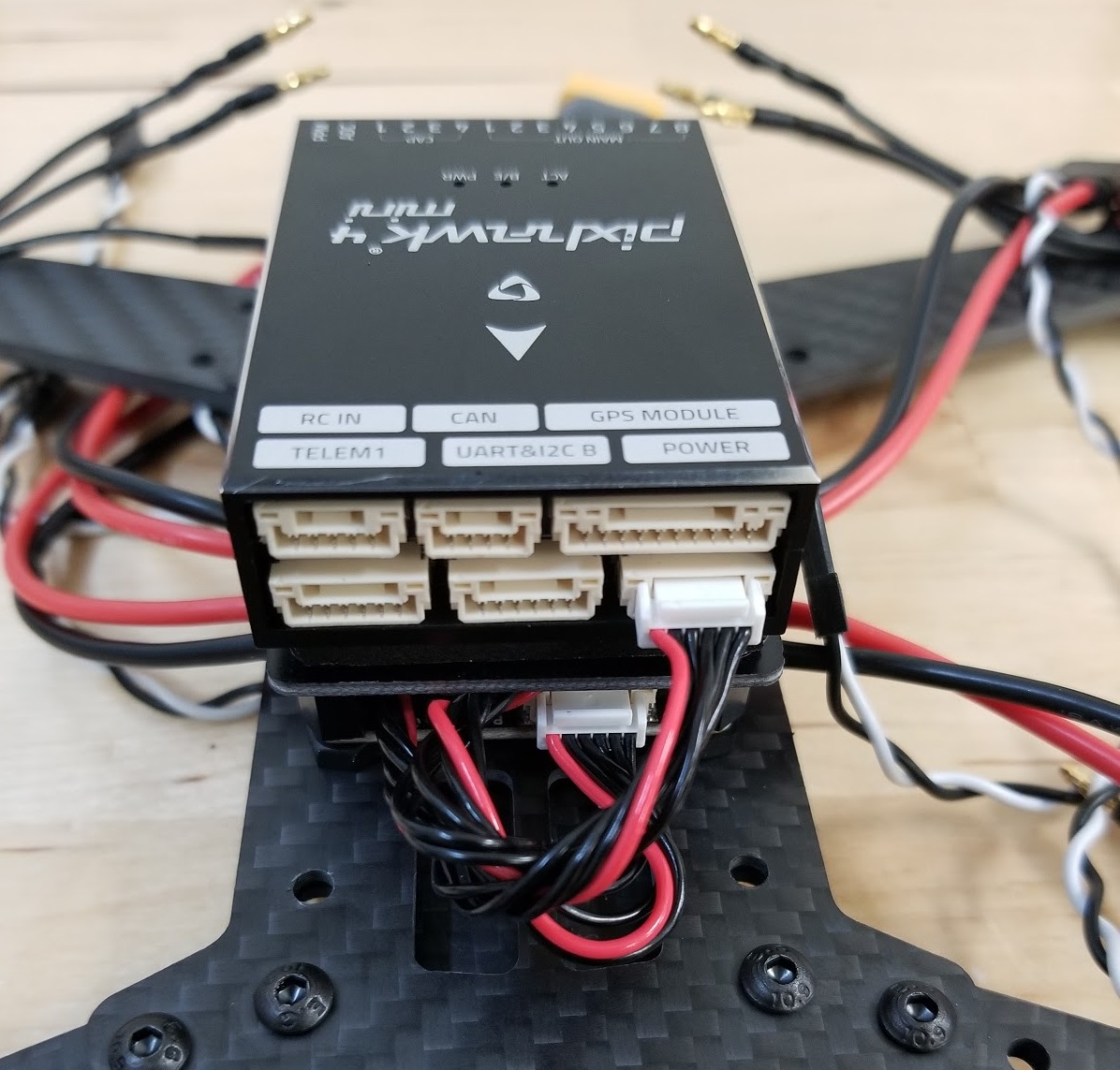
키트의 양면 테이프를 사용하여 Pixhawk 4 Mini를 비행 컨트롤러 플레이트에 부착합니다.

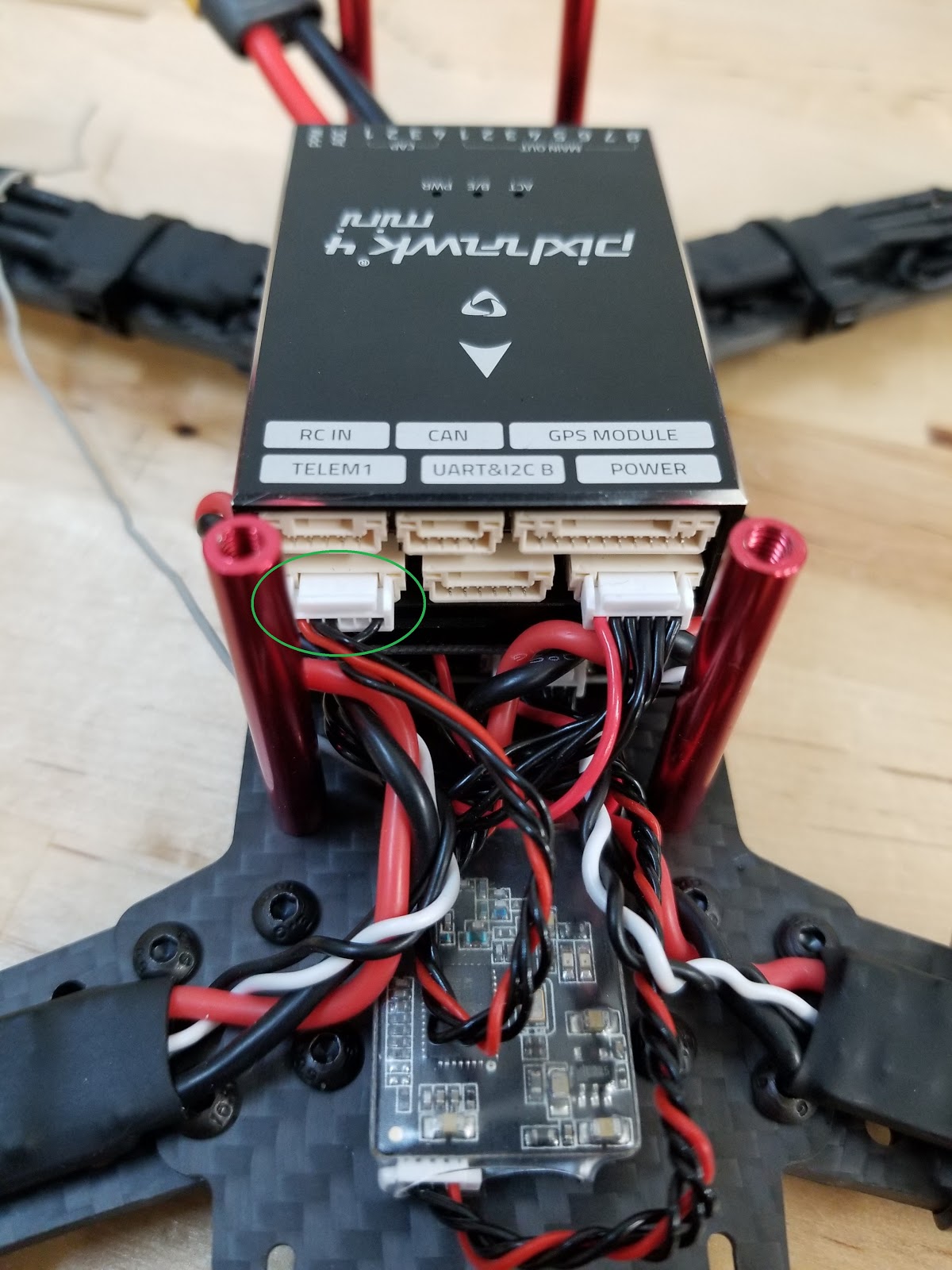
전원 모듈의 "전원"케이블을 <0 Pixhawk 4 mini에 연결합니다.
알루미늄 스탠드오프를 버튼 플레이트에 부착합니다.

Esc를 모터에 연결합니다. 이 이미지는 모터의 순서와 회전 방향을 나타냅니다.
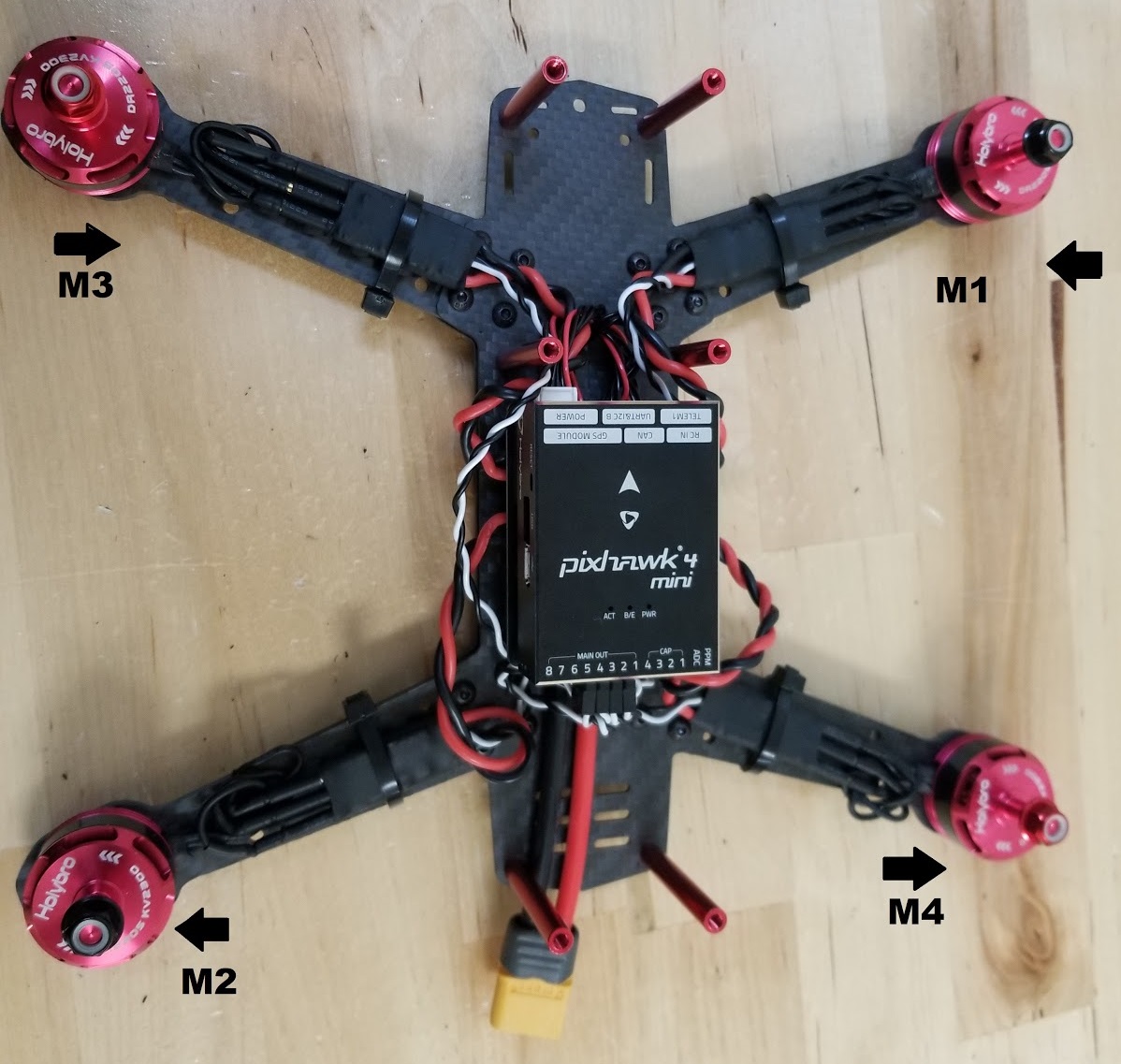
ESC의 모터를 연결하고 모터가 올바른 방향으로회전하는 지 확인하십시오. 모터가 반대쪽으로 회전하면 케이블 A를 패드 C로, C를 ESC의 패드 A로 변경하십시오.
WARNING
프로펠러를 제거한 상태에서 모터 회전 방향을 테스트합니다. :::

신호 ESC 케이블을 Pixhawk의 PWM 출력에 올바른 순서로 연결합니다 (이전 이미지 참조).

수신기 연결합니다.
PPM 수신기를 사용하는 경우 PPM 포트에 연결하십시오.

SBUS 수신기를 사용하는 경우 RC IN 포트에 연결합니다.

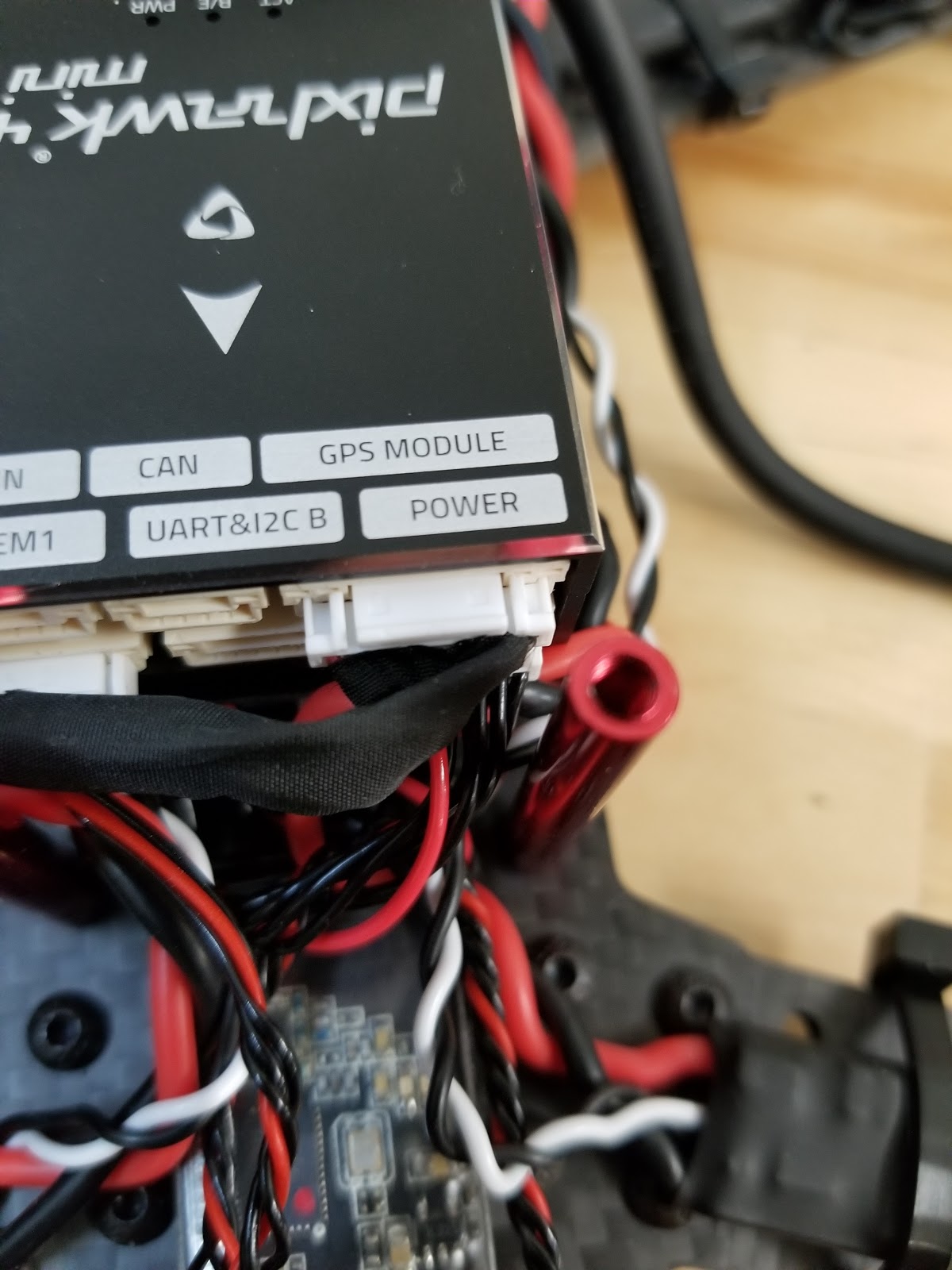
텔레메트리 모듈을 연결합니다. 이중 테이프로 모듈을 붙여넣고 텔레메트리 포트에 연결합니다.
GPS 모듈 연결
제공된 3M 테이프 또는 페이스트를 사용하여 상단 플레이트에 모듈을 부착합니다. 그런 다음 그림과 같이 스탠드오프에 상단 플레이트를 놓습니다.

마지막 "필수"조립 단계는 배터리를 고정하기 위해 벨크로를 추가하는 것입니다.
이제 "기본"프레임 빌드가 완료되었습니다 (필요한 경우, Pixhawk 4 Wiring 빠른 시작에서 구성 요소 연결에 대한 자세한 정보를 참조).
"기본" 버전의 키트가있는 경우, PX4 설치/설정 방법에 관한 지침으로 이동할 수 있습니다.
# FPV 조립
키트의 "전체" 버전에는 그림과 같이 차량 전면에 장착된 FPV 시스템이 추가로 제공됩니다.

키트를 설치하는 단계는 다음과 같습니다.
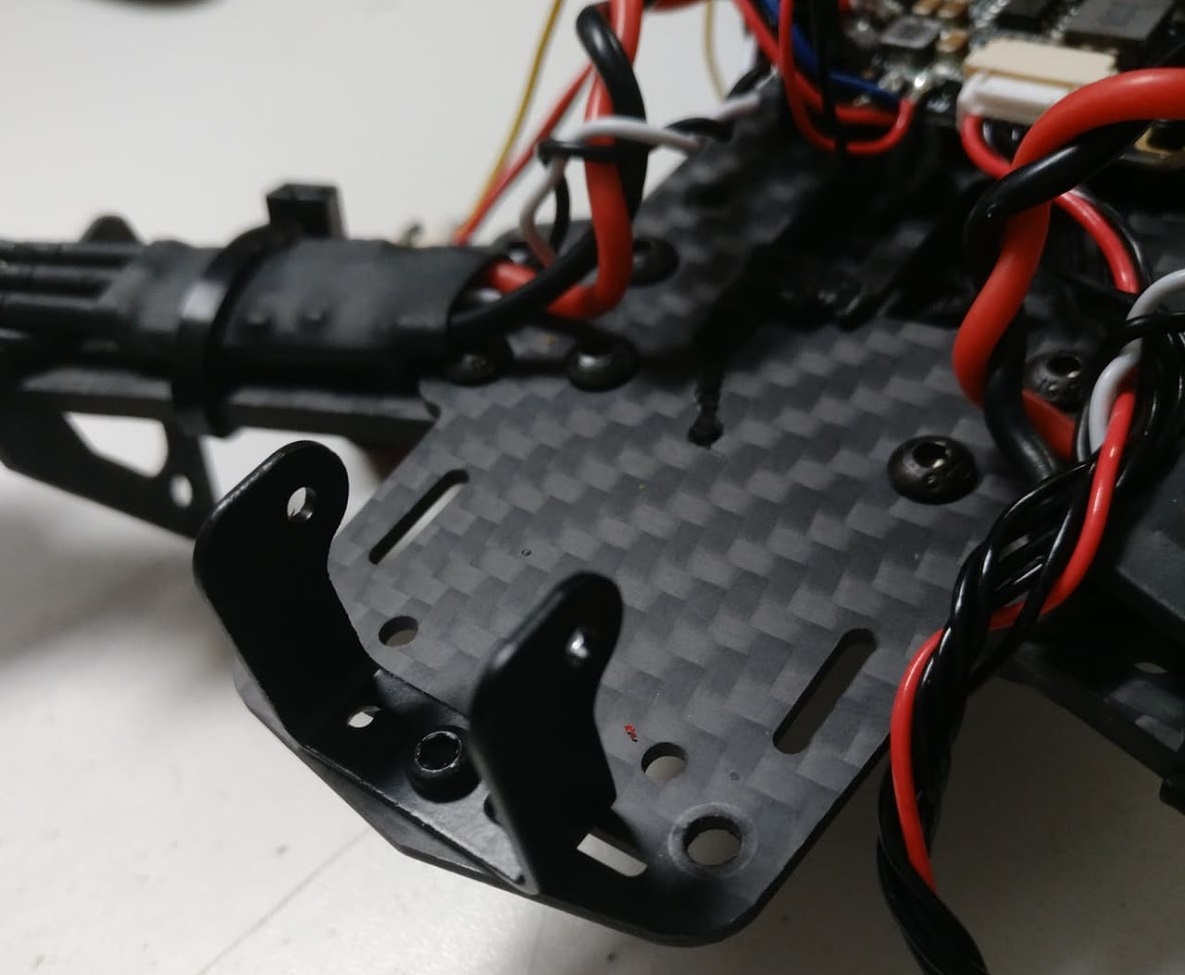
- 프레임에 카메라 브라켓 설치
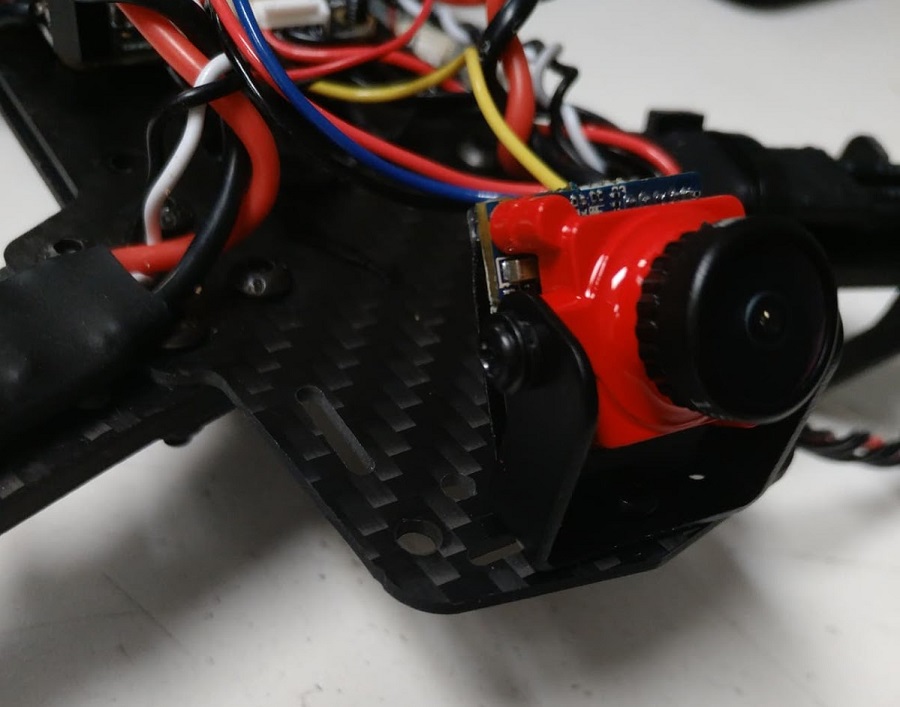
- 브라켓에 카메라 설치
- 전체 키트의 전원 모듈은 비디오 송신기와 카메라를 연결 배선과 함께 제공합니다.
- 카메라 커넥터 연결
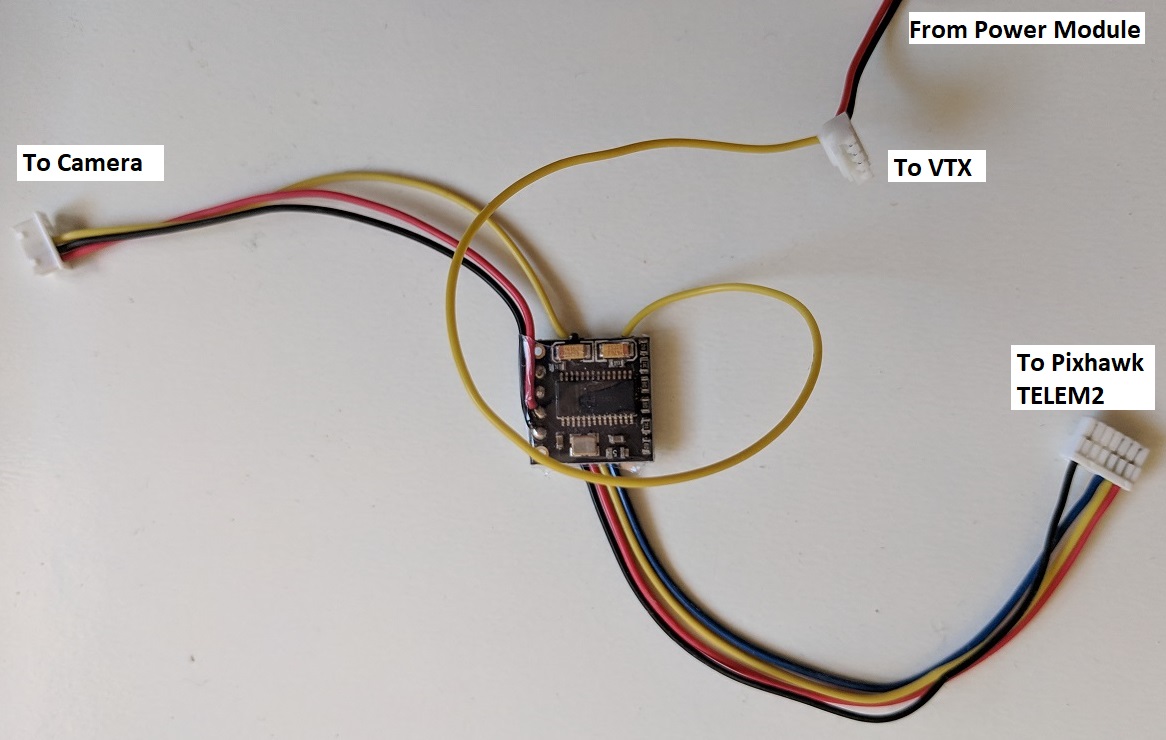
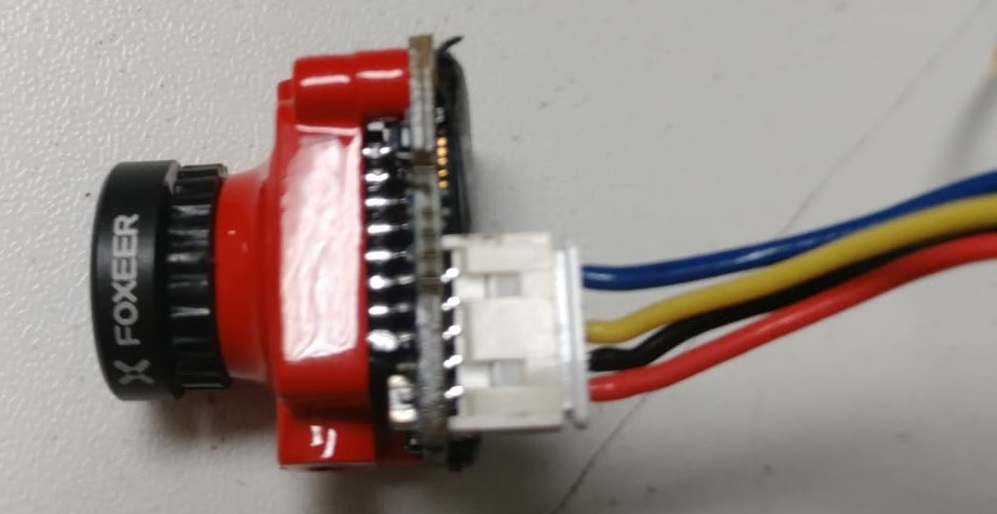 전선은 파란색 = 전압 센서, 노란색 = 비디오 출력, 검은 색 = 접지, 빨간색 = + 전압입니다.
전선은 파란색 = 전압 센서, 노란색 = 비디오 출력, 검은 색 = 접지, 빨간색 = + 전압입니다. - 비디오 송신기 (VTX) 커넥터 연결
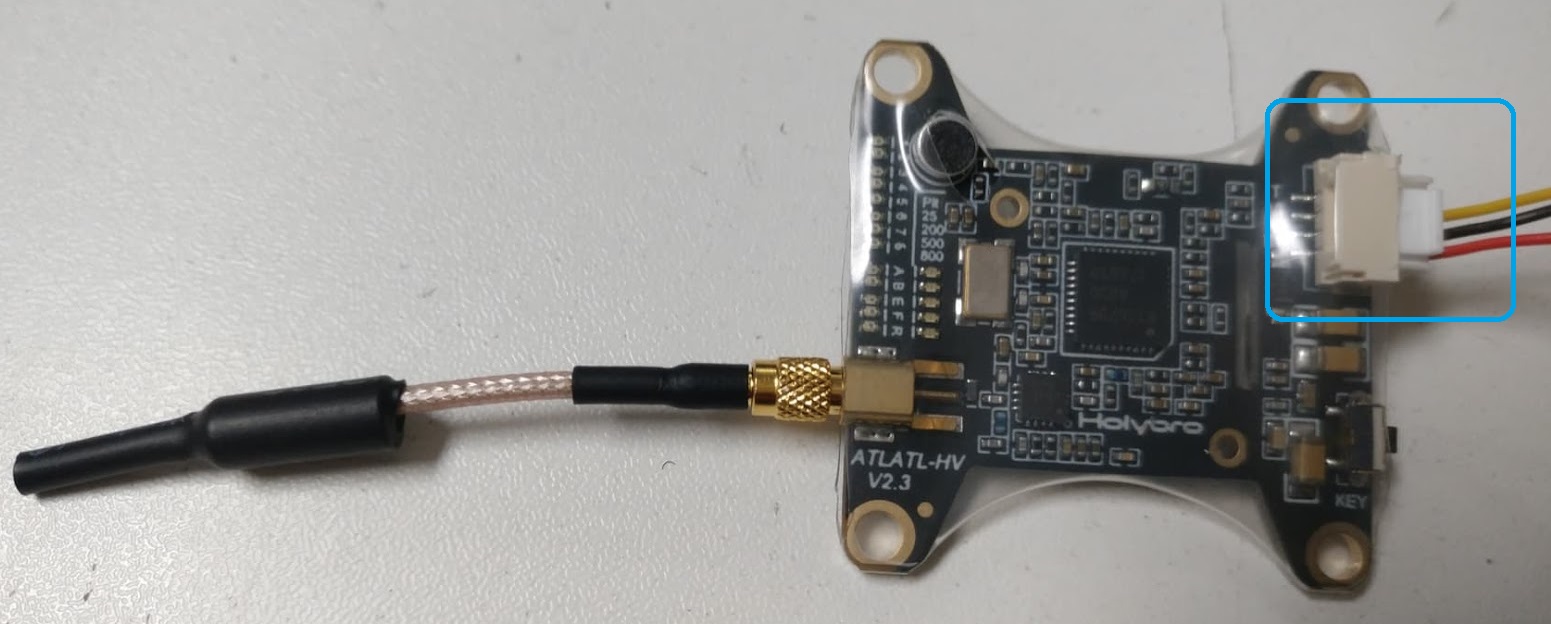 전선은 노란색 = 비디오 출력, 검은 색 = 접지, 빨간색 = + 전압입니다.
전선은 노란색 = 비디오 출력, 검은 색 = 접지, 빨간색 = + 전압입니다.
- 카메라 커넥터 연결
- 테이프를 사용하여 비디오 송신기와 OSD 보드를 프레임에 고정합니다.
Note
시스템을 직접 배선해야하는 경우, 아래 다이어그램은 카메라, VTX 및 전원 모듈 간의 연결 방법을 나타냅니다. 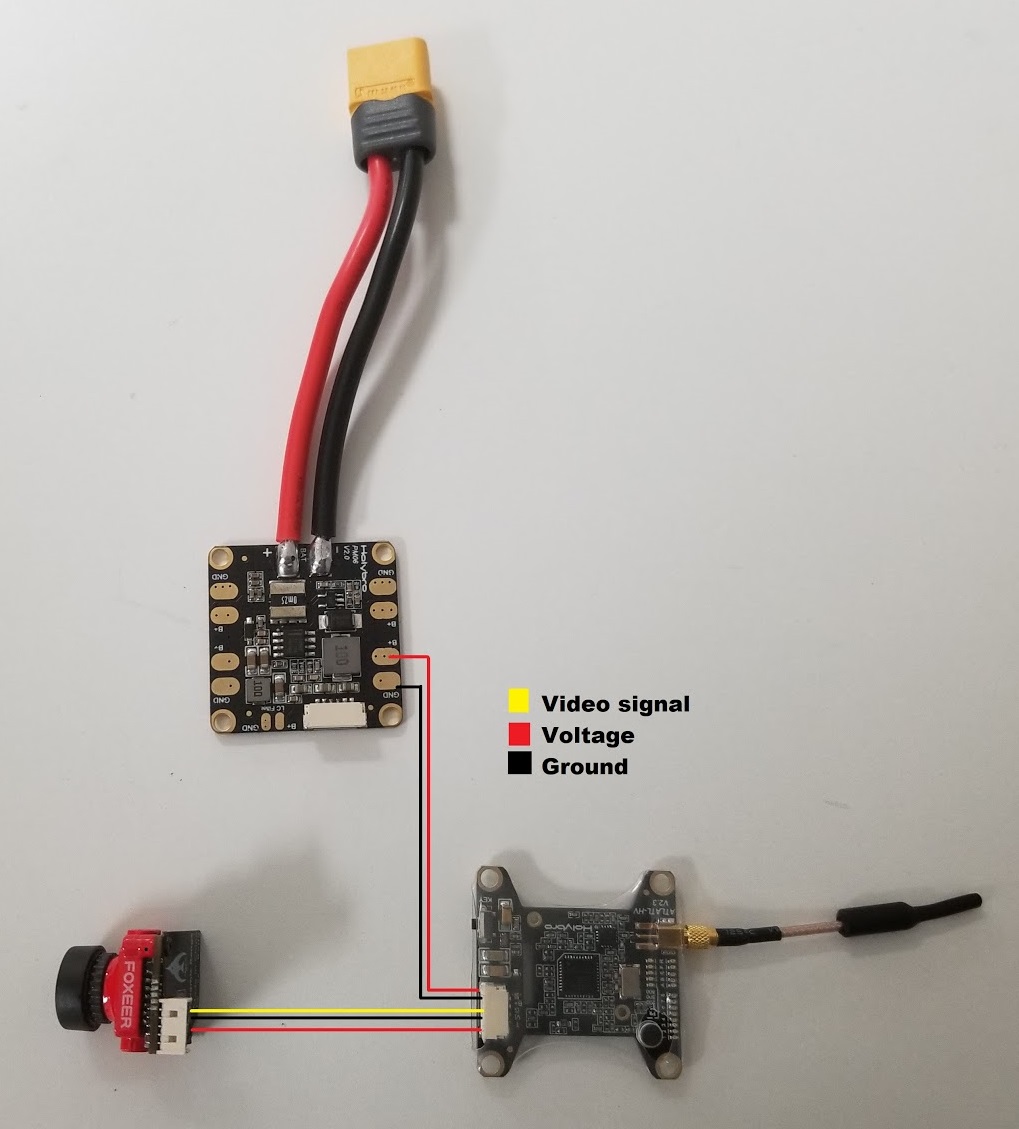
# PX4 설치/설정
QGroundControl에서 PX4 자율비행 프로그램을 설치하고 QAV250 프레임 설정과 보정 작업을 진행합니다. QGroundControl을 다운로드후에 설치 (opens new window) 하십시오.
PX4 설치 및 설정 매뉴얼은 [기본 설정](../config/README.md)편을 참고하십시오.
먼저, 펌웨어와 기체프레임을 업데이트 합니다.
Note
HolyBro QAV250 기체 (Quadrotor x > HolyBro QAV250)를 선택하여야 합니다.
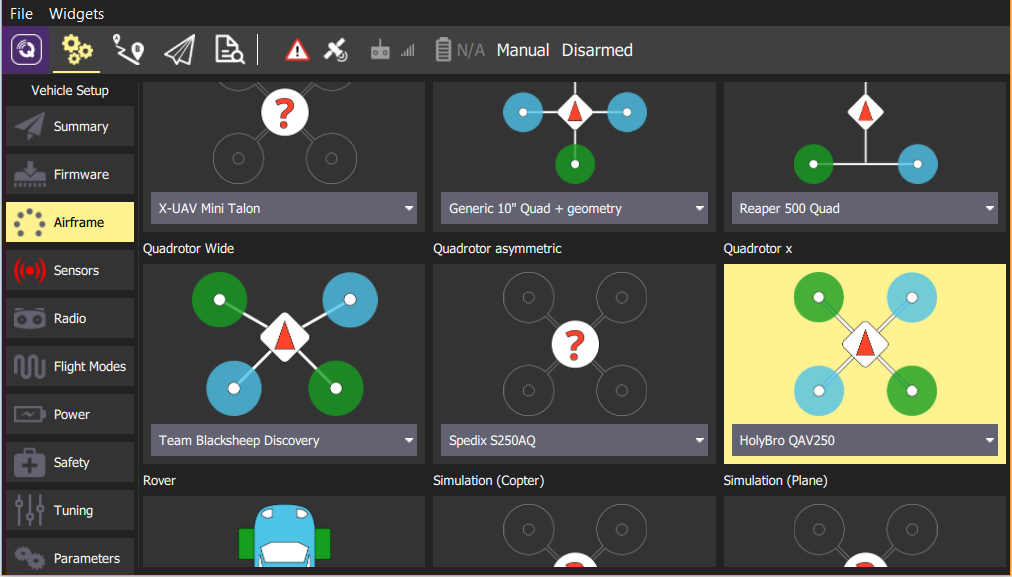 ::: 다음에는 필수작업인 설정작업과 보정 작업을 진행합니다.
::: 다음에는 필수작업인 설정작업과 보정 작업을 진행합니다.
다음 작업 역시 반드시 진행하여야 합니다.
# 튜닝
기체 선택은 프레임의 기본 자동 조종 매개 변수를 설정합니다. 이 상태로도 비행하기에 충분하지만, 특정 프레임 구성에 대한 파라미터를 조정하는 것이 좋습니다.
튜닝 정보는 멀티 콥터 PID 튜닝 가이드를 참조하십시오.
# 감사의 글
이 조립 로그는 PX4 테스트 팀에서 제공하였습니다.