# Lumenier QAV250 Pixhawk Mini 조립
Lumenier QAV250 Mini FPV Quadcopter (opens new window)는 작지만 완벽하게 작동하는 FPV 멀티 콥터 프레임입니다. QGroundControl을 사용하여 PX4 자동 조종 장치를 설치 및 구성하는 방법을 포함하여 * Pixhawk Mini* 비행 컨트롤러와 함께 프레임을 사용하기위한 전체 조립 방법 및 설정 방법을 설명합니다.
주요 정보
- 프레임: Lumenier QAV250 CF
- 비행 컨트롤러: Pixhawk Mini
- 예상 조립 시간: 3.5시간 (프레임 조립에 2시간, 오토파일럿 설정에 1.5시간)


# Bill of Materials
이 조립에 사용된 부품들은 아래에 구매 링크와 함께 설명되어 있습니다. 일반적으로 제조업체에서 권장하는 비행 컨트롤러와 기체의 하드웨어를 사용하였습니다.
- 비행 컨트롤러: Holybro Pixhawk Mini
- 전원 모듈 : 3DR 10s 전원 모듈 (단종)
- ESC: Lumenier f390 with Blheli (getfpv.com (opens new window)). 모터와 함께 제공됩니다.
- Motors: Lumenier RX2204 -14 2300KV (getfpv.com (opens new window))
- 프로펠러: Lumenier 5x4.5 2 블레이드(getfpv.com (opens new window))
- Frame: Lumenier QAV250 - CF (getfpv.com (opens new window)) (Discontinued)
- Receiver: FrSSKY D4R-II (opens new window)
- 배터리: Lumenier 4S 1300 mAh (getfpv.com (opens new window))
참고:
- Pixhawk Mini와 함께 제공되는 4S 전원 모듈은 위의 배터리 크기로 사용할 수 있습니다 (10S 전원 모듈 대신). 두 전원 모듈의 조립은 동일합니다.
- 또한 다음 ESC를 권장합니다 : Lumenier 12amp ESC w / SimonK AutoShot (2-4s N-FET) (getfpv.com (opens new window)).
# 하드웨어
프레임과 자율비행프로그램 설치를 위한 하드웨어들 입니다.
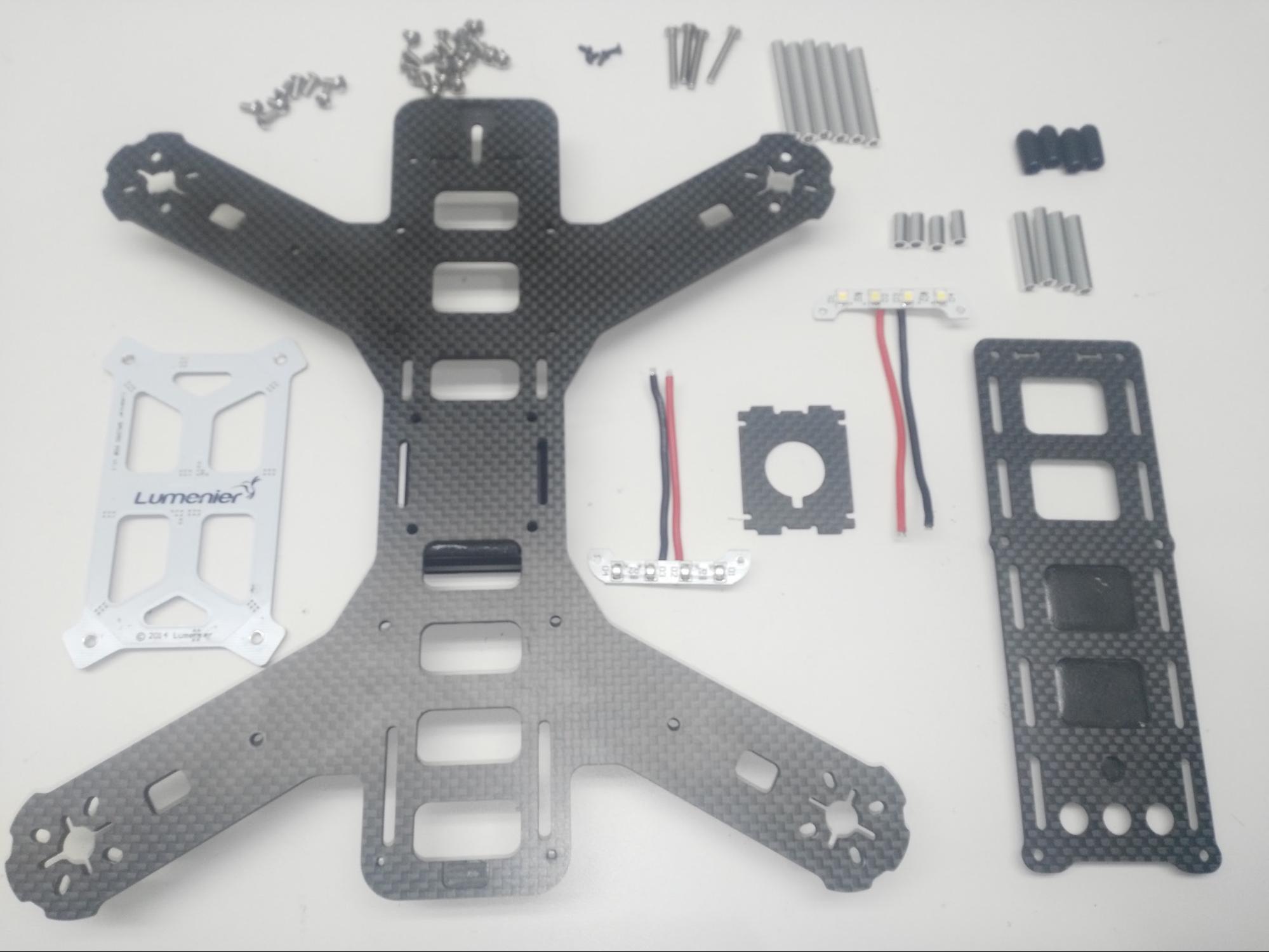
# 프레임 QAV250
| 설명 | 수량 |
|---|---|
| 유니바디 프레임 플레이트 | 1 |
| 비행 컨트롤러 커버 플레이트 | 1 |
| PDB | 1 |
| 카메라 플레이트 | 1 |
| 35mm 스탠드오프 | 6 |
| 25mm 스탠드오프 | 4 |
| 10mm 스탠드오프 | 4 |
| 비닐 캡 | 4 |
| 20mm 강철 나사 | 4 |
| 18mm 강철 나사 | 10 |
| 벨크로 배터리 혁지 | 1 |
| 배터리용 폼 | 1 |
| LED 스트립 | 2 |
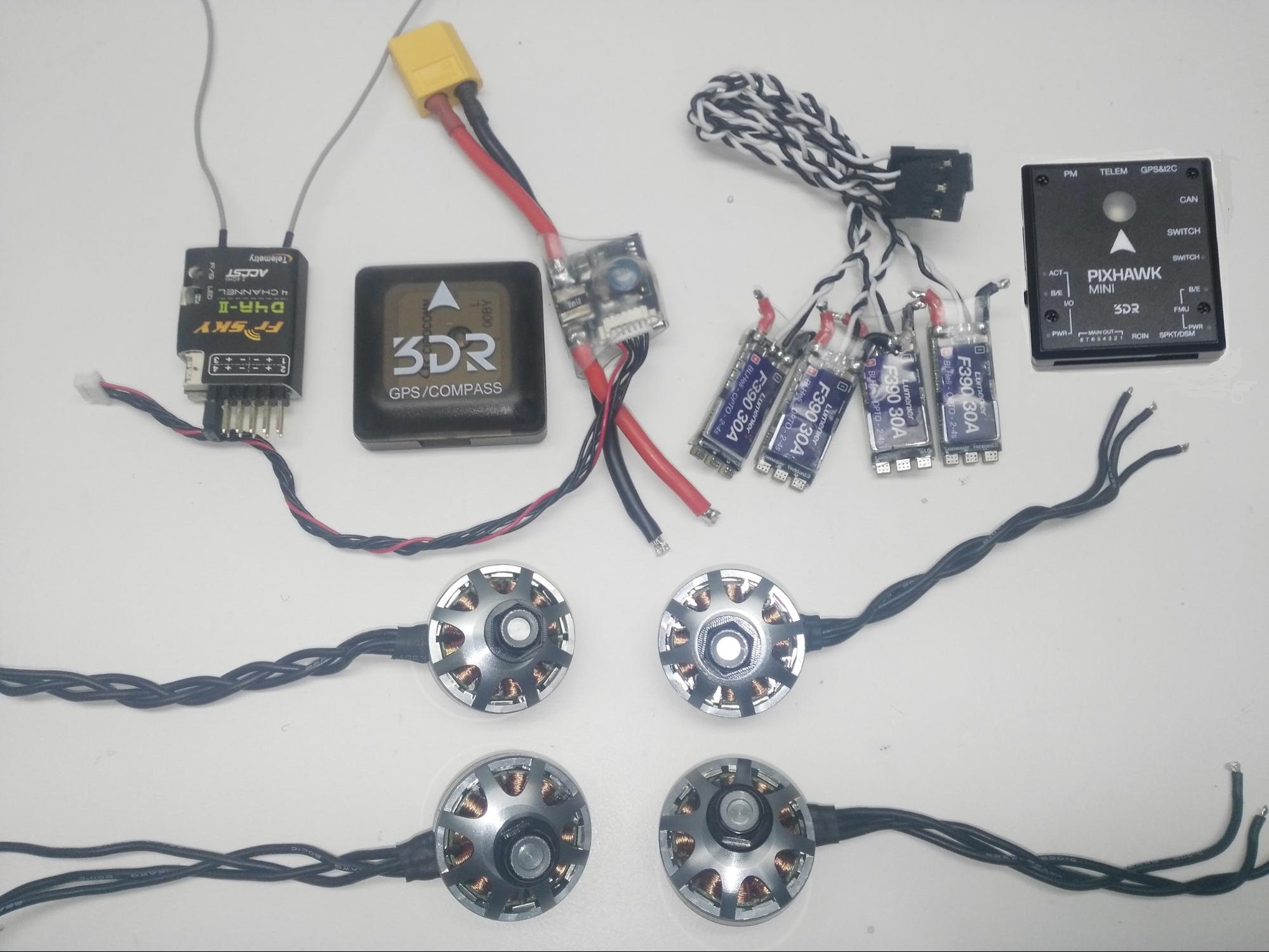
# 전자부품
| 설명 | 수량 |
|---|---|
| 모터 lumenier Rx2204-14 2300KV | 4 |
| ESC lumenier 30A | 4 |
| 3DR 전원 모듈 10S | 1 |
| Fr-sky D4R-II 수신기 | 1 |
| 3DR Pixhawk Mini autopilot | 1 |
| 3DR GPS Neo-M8N | 1 |
| 8 PWM Servo 출력 | 1 |
| 외부 안전 스위치 | 1 |
| 마이크로 SD 카드 | 1 |
| 배터리 lumenier 1300 mAh 4S 14.8V | 1 |
# 무선 텔레메트리(선택 사항)
선택사항으로, 무선텔레메트리를 사용하여 GCS (지상 관제소) 컴퓨터를 자동 조종 장치와 무선 연결할 수 있습니다. 이를 통하여 비행 중 데이터를 조회하고, 비행 중에 임무를 변경하고, 비행 중에 차량을 조정할 수 있습니다.
PX4/Pixhawk Mini는 다양한 무선 텔레메트리를 지원합니다. 이 조립에 사용되는 라디오(적극 권장) *3DR Telemetry Radio (915MHz)*입니다 (단종 됨).
Note
무선 텔레메트리는 현지 규정을 적합한 적절한 주파수 대역을 사용하여야 합니다. 해당 지역에 적합한 버전을 선택하십시오 : 미국 - 915MHz, 유럽/호주 - 433MHz
텔레메트리 키트에는 다음과 같은 항목들이 포함되어 있습니다.
- 2 개의 텔레메트리 수신기 (차량 및 GCS 용)
- Micro USB 케이블
- Android OTG 어댑터 케이블
- 양면 테이프

# 조립 도구
조립시에 필요한 공구들입니다.
- 2.0mm 육각 스크류드라이버
- 3mm 필립스 스크류드라이버
- 전선 커터
- 납땜 인두 및 땜납
- 정밀 트위저

# 오프-프레임 조립
이 섹션에서는 전자 장치의 배선 방법과 전자 장치없이 프레임 조립 방법을 설명합니다. 이 정보는 프레임내 스크린 샷이 명확하지 않은 경우 참고용으로 사용할 수 있습니다.
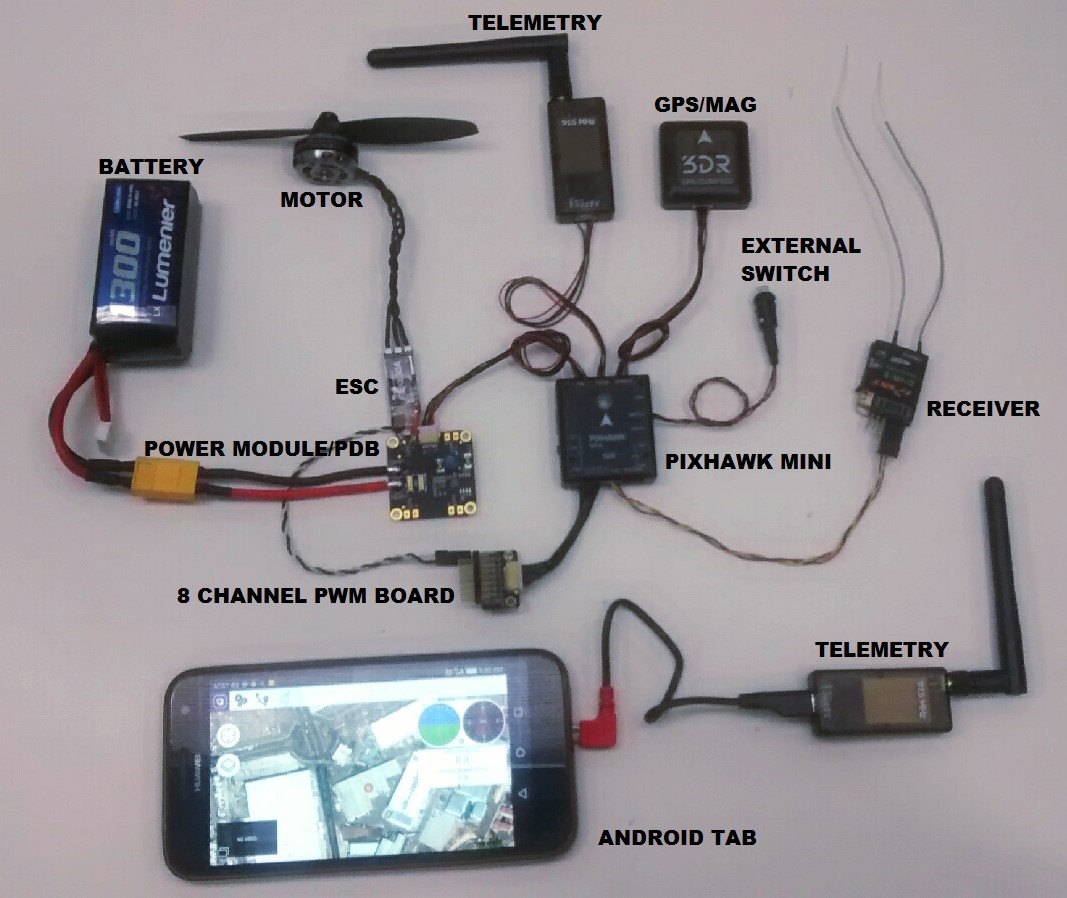
# 전자 장비 배선 / 연결 (오프 프레임)
아래의 이미지는 Pixhawk Mini의 표준 멀티 콥터 배선을 보여줍니다. 쿼드 전력 분배 보드를 사용하여 ESC, Pixhawk 및 Pixhawk 전원 레일에 전원을 공급합니다 (보드에는 최대 4S의 배터리를 지원하는 통합 전원 모듈이 포함되어 있습니다).
Note
이 QAV250 빌드의 경우 대신 별도의 10S 전원 모듈을 사용하여 ESC 및 Pixhawk에 전원을 공급하고 옵션 외부 스위치를 사용하지 않습니다. 그렇지 않은 경우에도 배선 방법은 유사합니다!
# 프레임 조립
Note
이 섹션에서는 복잡한 전자 장치를 제외한 프레임을 조립 방법을 설명합니다. 아래의 조립 문서에서 참조됩니다.
프레임 조립 방법 :
1 단계 : 그림과 같이 PDB 용 10mm 스탠드오프와 20mm 강철 나사를 사용합니다.
2 단계 : 스탠드오프에 프레임을 위치시킵니다.

Note
프레임 플레이트가 정확하게 장착되었는 지 확인하십시오. 아래 표시된 컷은 프레임 하단을 보여줍니다. 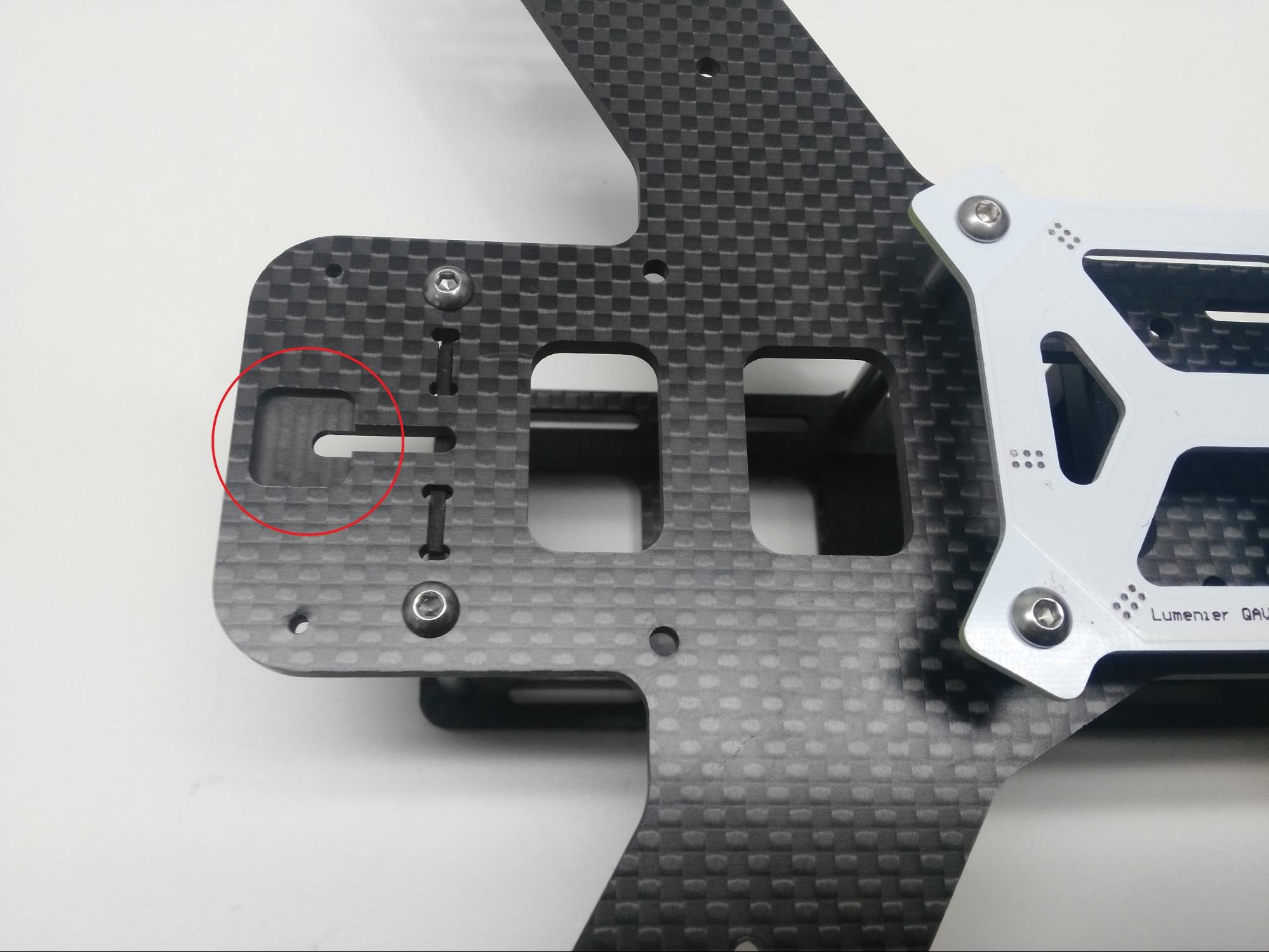 :::
:::
3 단계 : 나사에 35mm 스탠드오프를 끼 웁니다 (2.0mm 육각 드라이버가 필요함).

4 단계 : 카메라 플레이트를 부착하고 나머지 스탠드오프를 추가합니다.
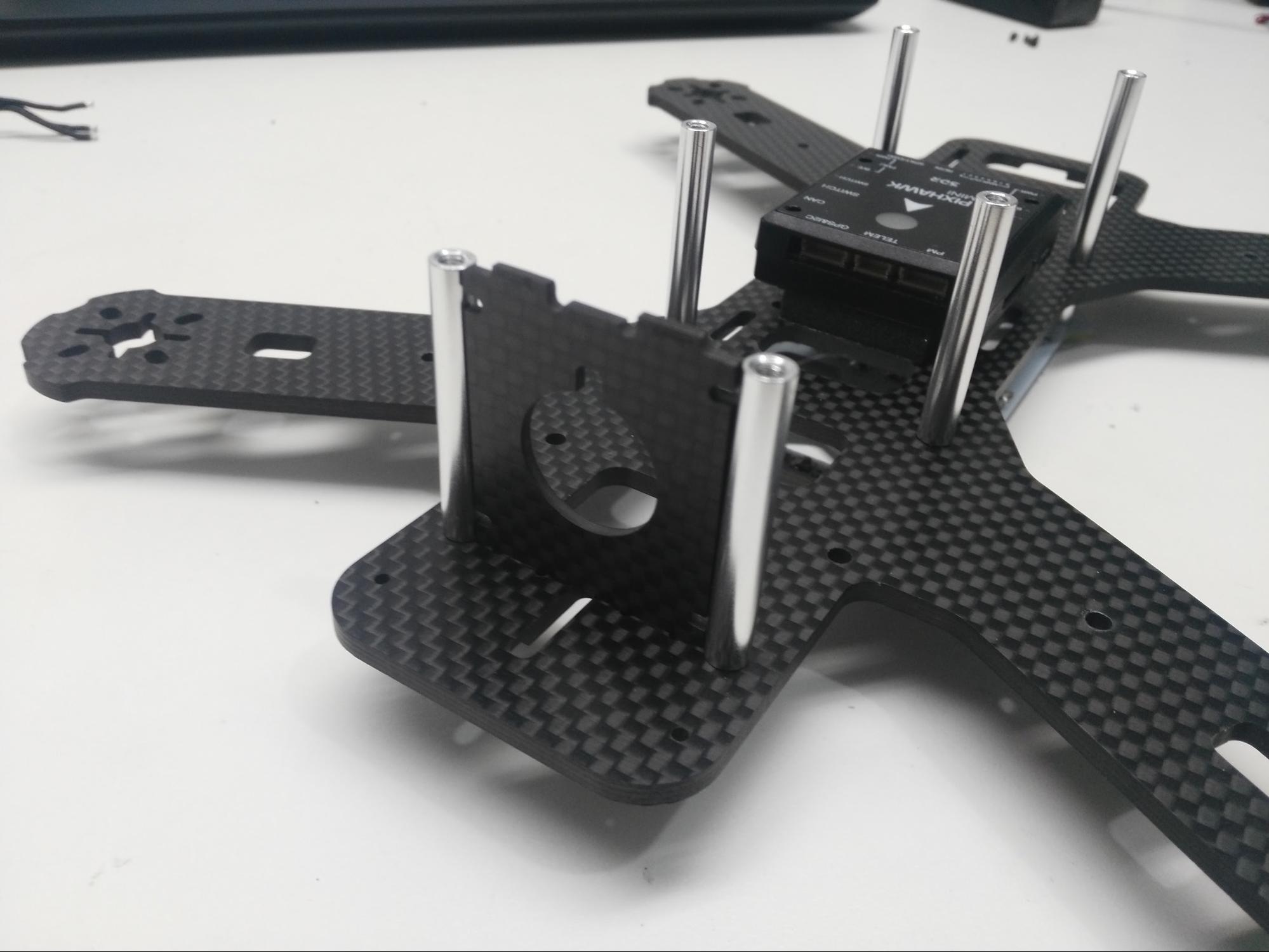
5 단계 : 비행 컨트롤러 커버 플레이트를 스탠드오프에 놓고 나사로 고정합니다.

추가: 제조업체에서 제공하는 조립 방법은 여기에서 찾을 수 있습니다. Lumenier QAV250 탄소 섬유 조립 매뉴얼 (opens new window).
# 전자 장치를 포함한 전체 조립
Pixhawk Mini, 모터 및 기타 전자 장치와 함께 QAV250의 전체 조립 방법을 설명합니다.
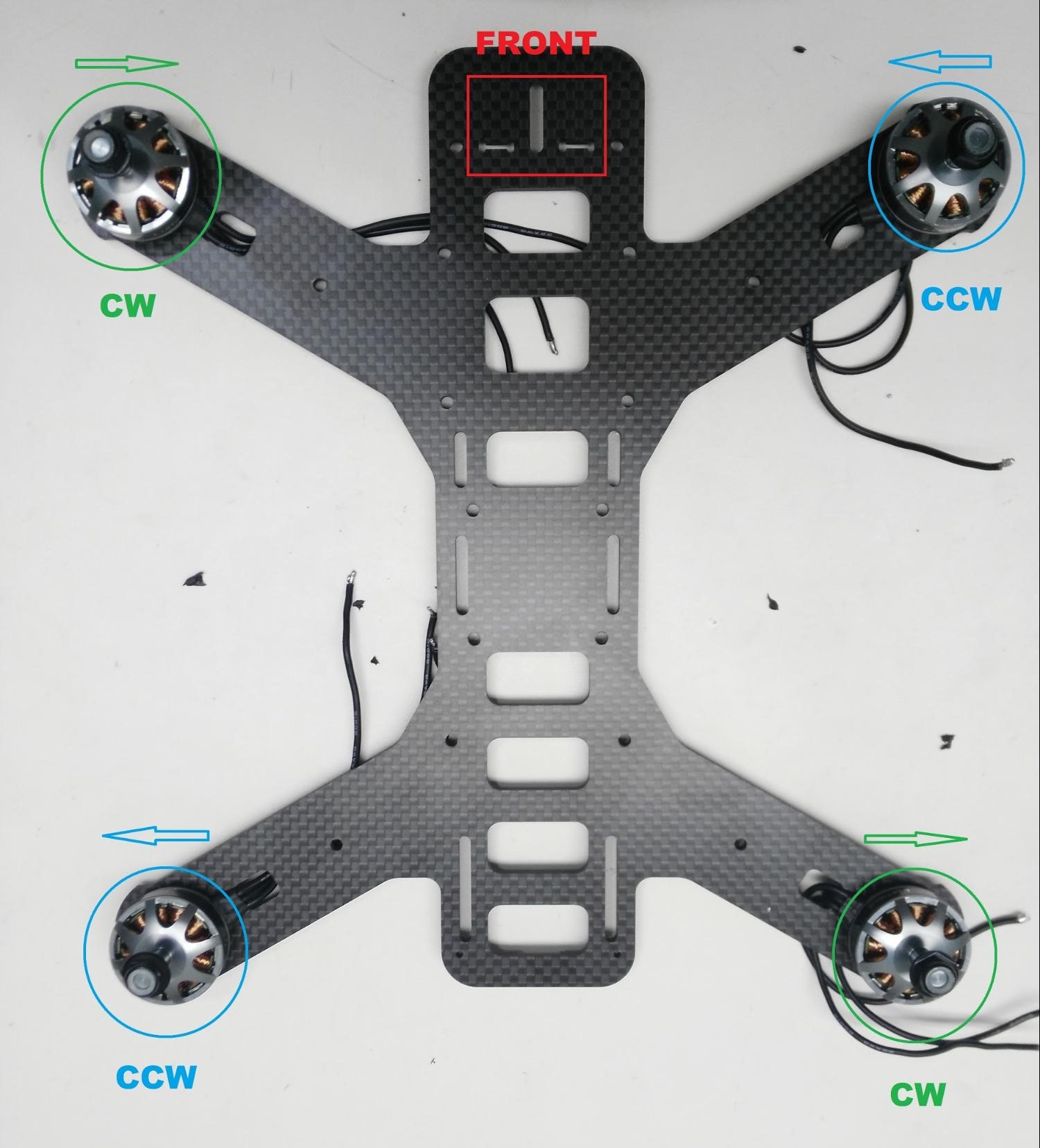
1 단계 : 모터 설치
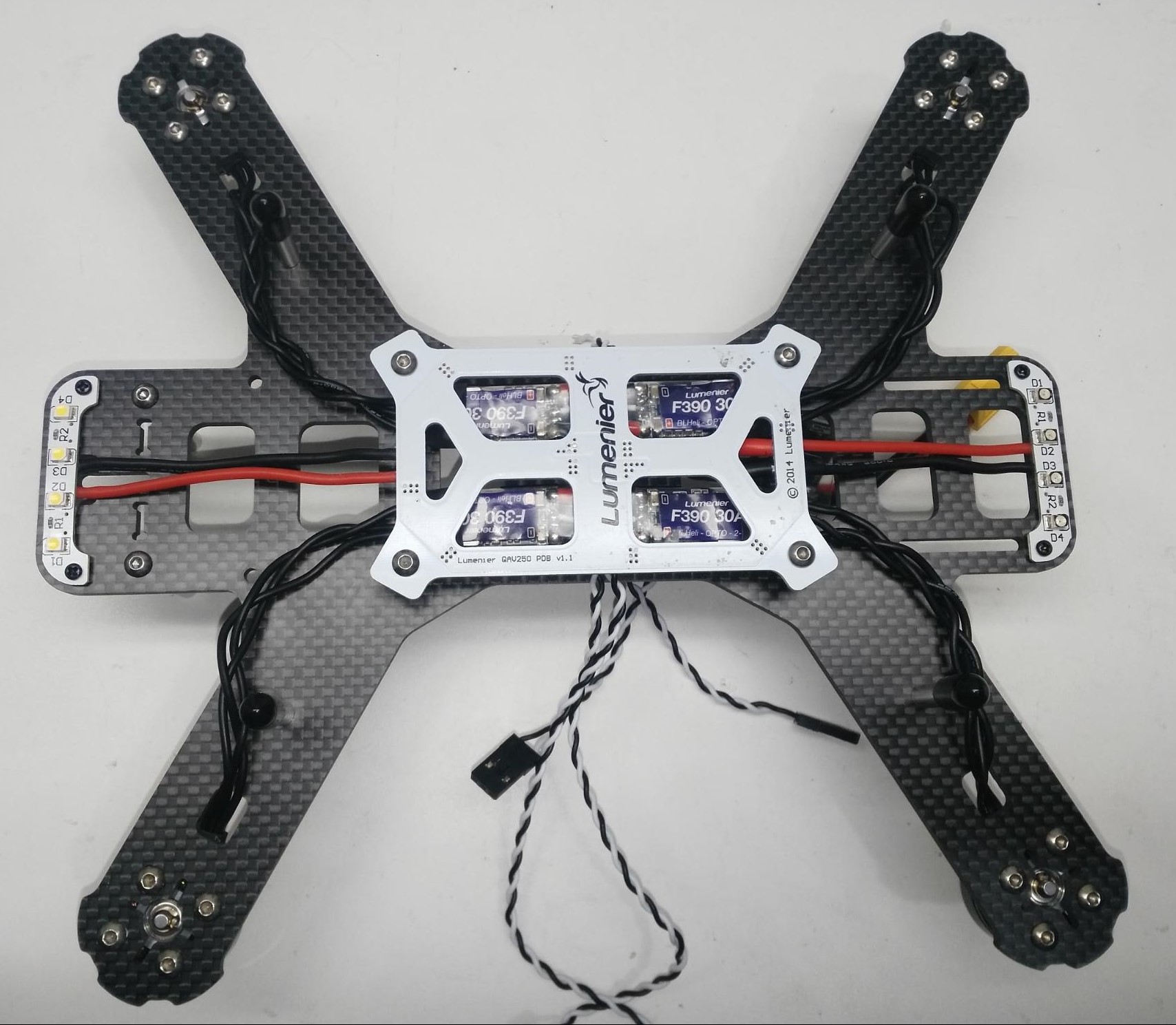
빨간색 표시는 프레임의 전방을 표시합니다. 프레임에 순서대로 모터를 배치하고 프레임 하단을 통해 케이블을 통과 시키십시오.
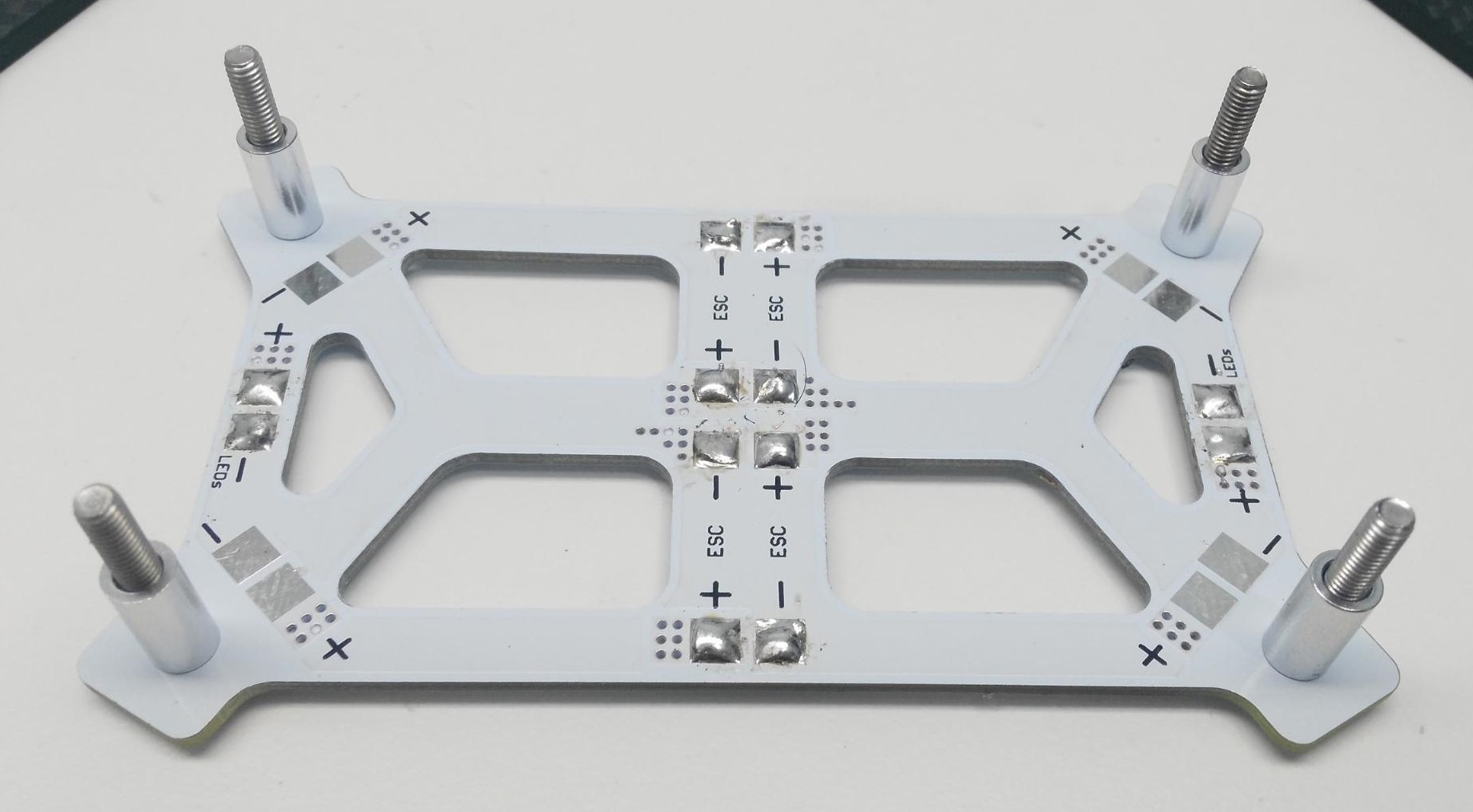
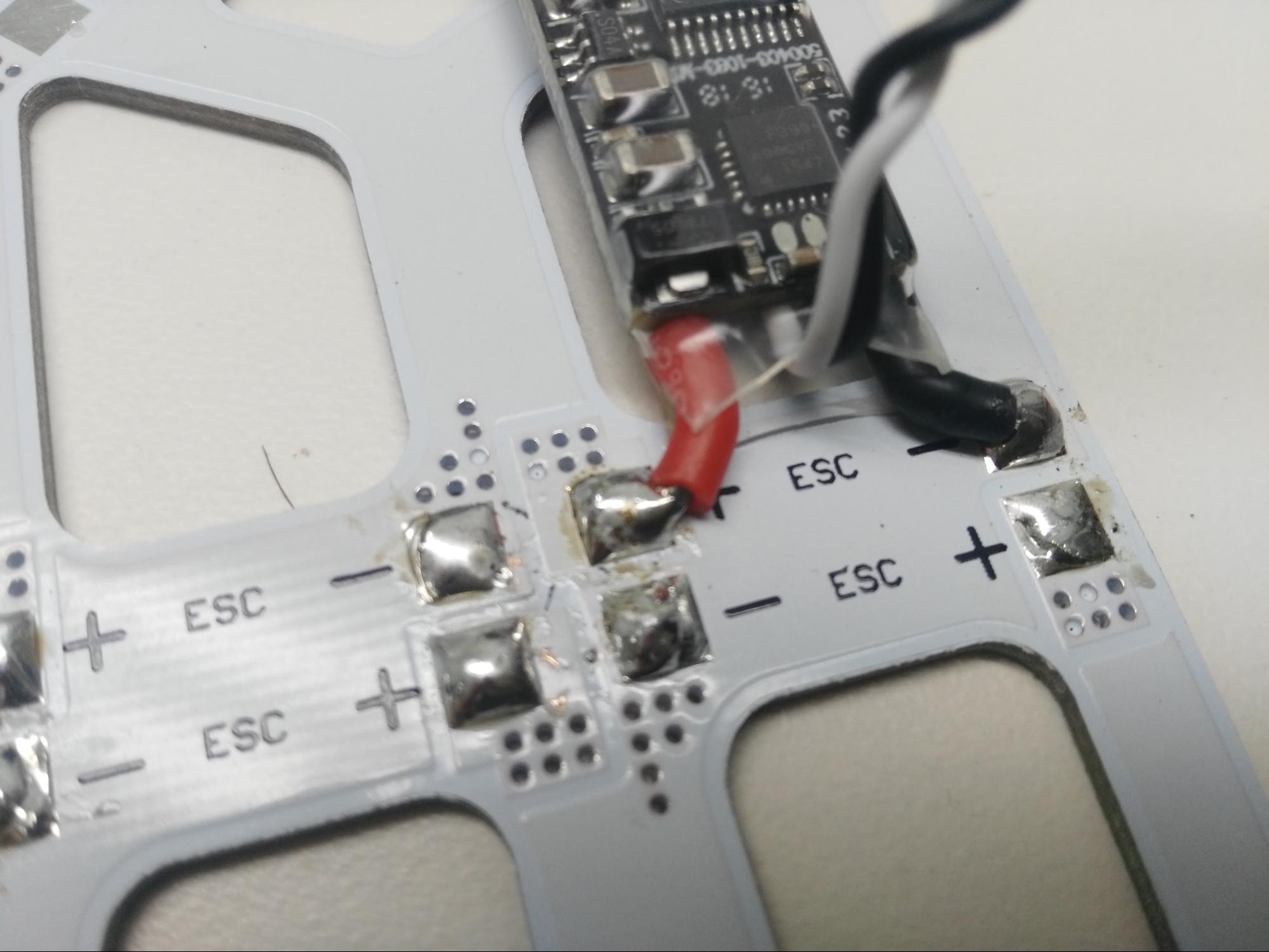
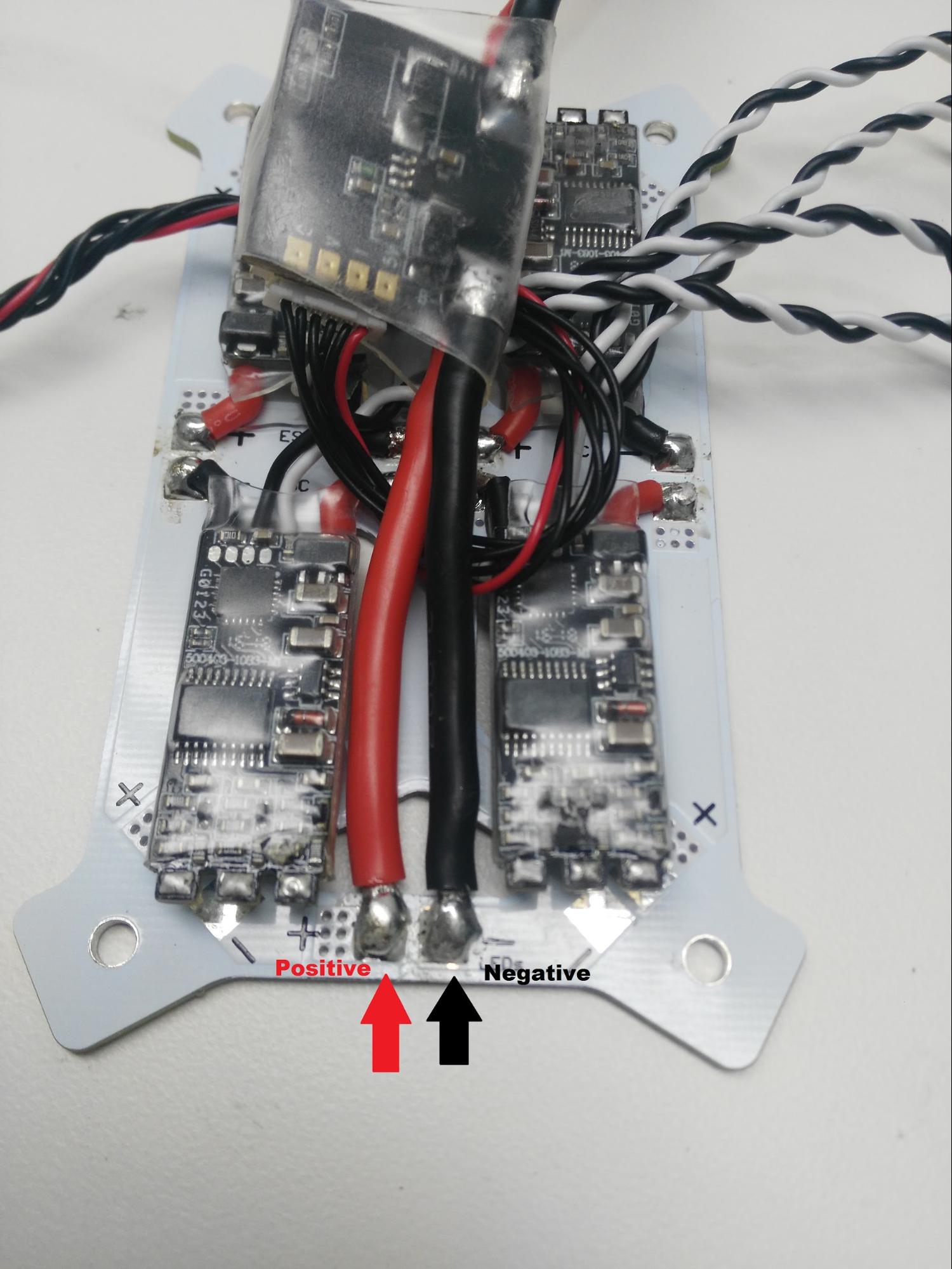
2 단계 : 4 개의 ESC를 PDB에 납땜
빨간 색 케이블은 양극 패드에 납땜하고, 검은 색 케이블은 음극 패드에 납땜하여야 합니다 (아래는 단일 ESC에 대해 표시됨).
3 단계 : 전원 모듈을 PDB에 납땜
빨간 색 케이블은 양극 패드에 납땜하고, 검은 색 케이블은 음극 패드에 납땜하여야 합니다. 조립방법에 맞는 방식으로 납땜하십시오.
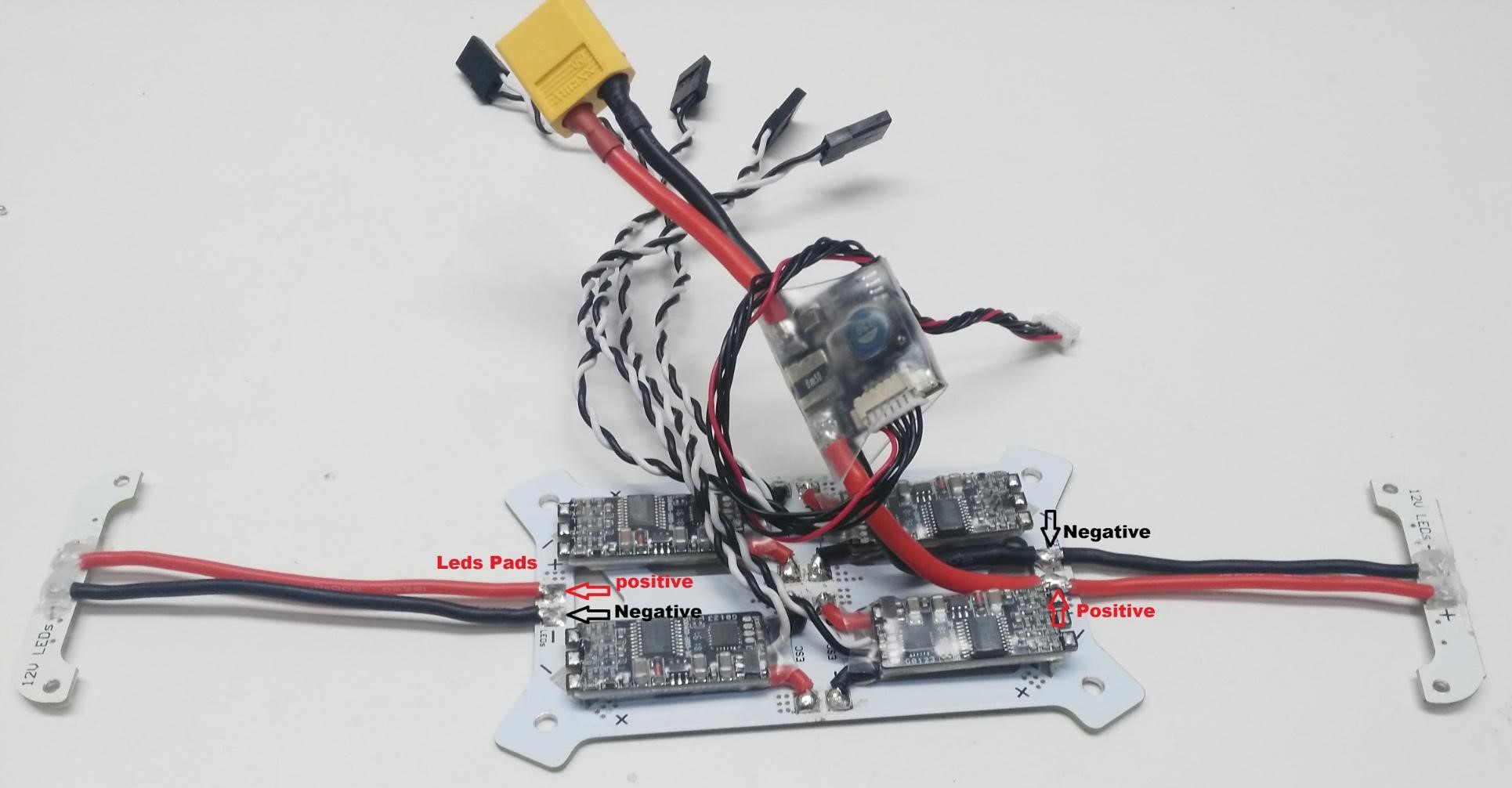
4 단계 : LED를 PDB에 납땜
빨간 색 케이블은 양극 패드에 연결하고, 검은 색 케이블에는 음극 패드에 연결하여야 합니다. 흰색 LED는 전면용이고 빨간색 LED는 후면용입니다.
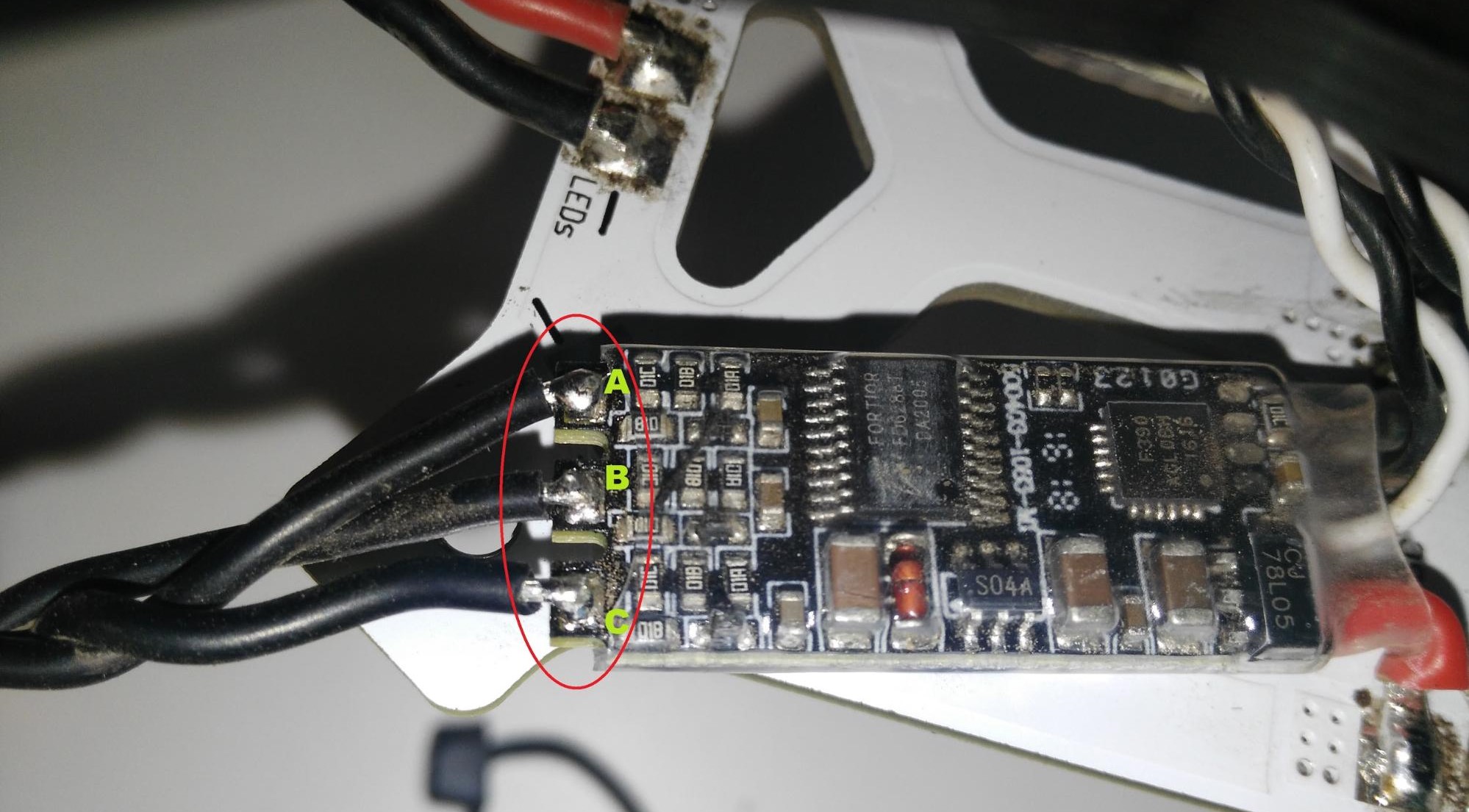
5 단계 : 모터를 ESC에 납땜
아래 그림과 같이 모터 케이블을 ESC 패드에 납땜하십시오. 모터가 올바른 방향으로 회전하는지 확인하십시오. 모토 회전 방향을 변경하려면, ESC에서 케이블 A와 C의 위치를 바꿉니다.
Note
케이블이 올바른 순서로 납땜되면 전기 테이프 또는 튜브로 패드를 덮으십시오. 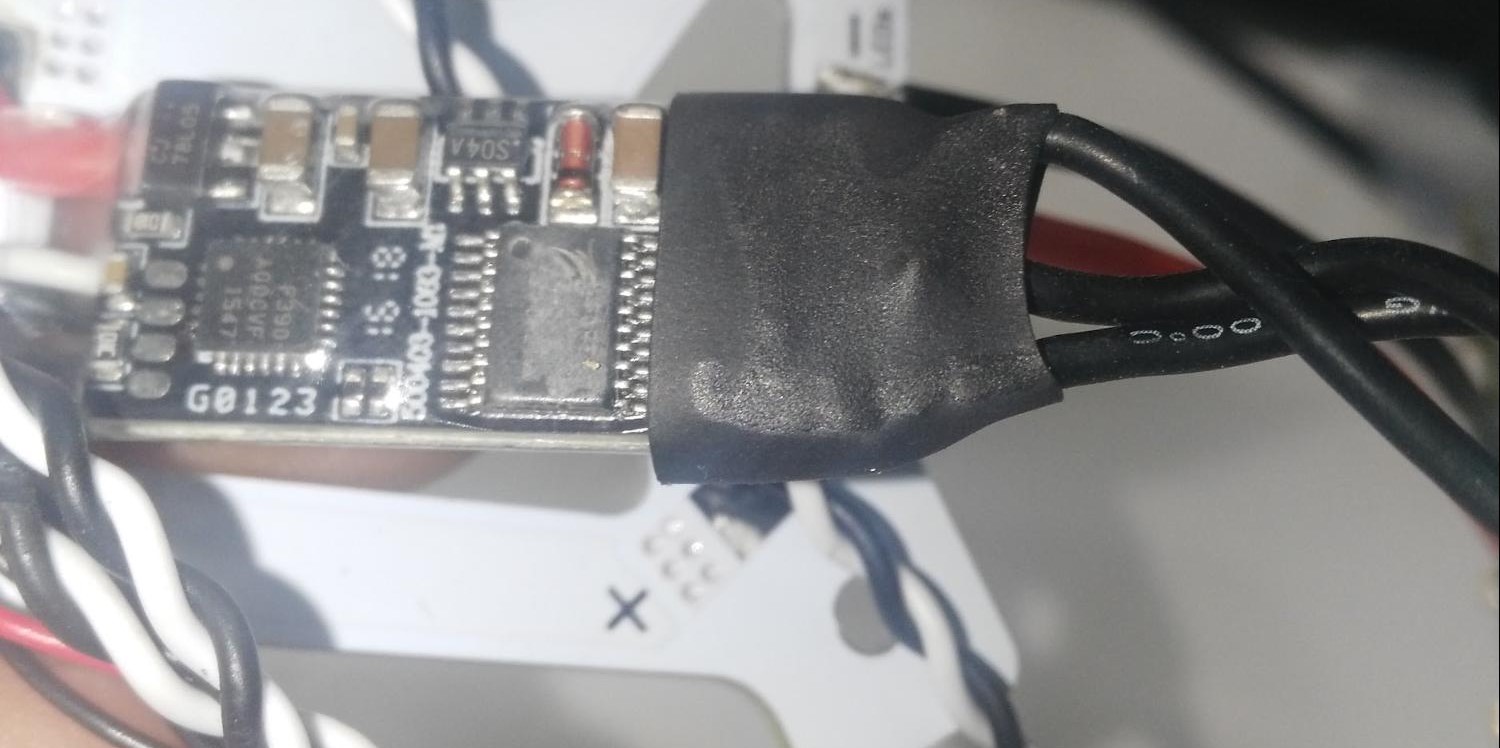 :::
:::
6 단계 : 프레임에 PDB 연결
프레임 조립 섹션에 설명된 단계를 따르십시오.

7 단계 : 제공된 Phillips 나사를 사용하여 LED를 프레임에 부착합니다.
WARNING
탄소 섬유는 프레임의 용접과의 접촉을 피하기 위해 사용되는 전도성 실리콘입니다. 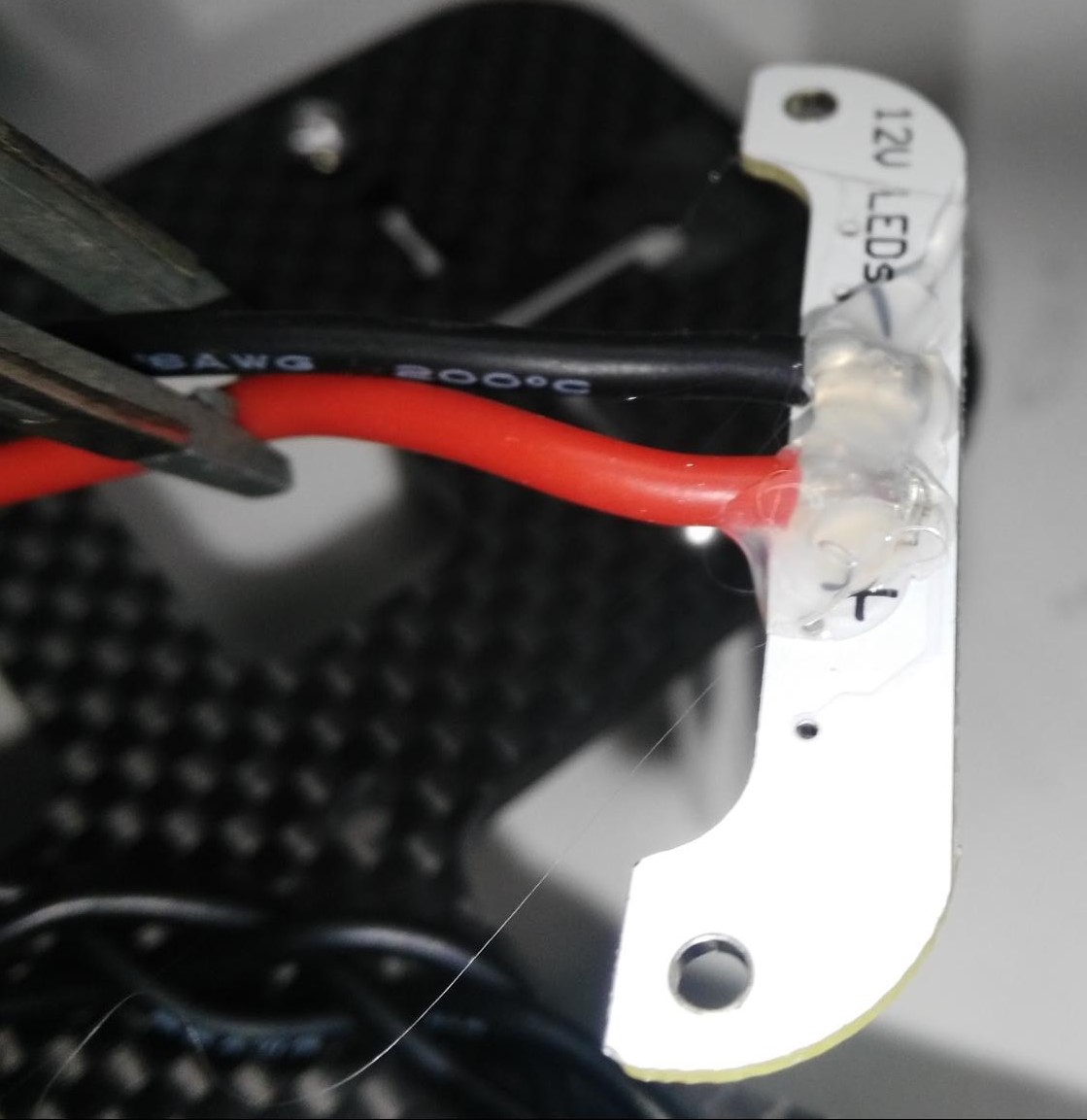 :::
:::
8 단계 : 그림과 같이 진동 감쇠 폼을 프레임에 부착합니다 (폼은 Pixhawk Mini 키트에 포함되어 있음).
폼은 Pixhawk 성능에 영향을 미칠 수 있는 진동을 줄여줍니다. 폼은 양면이 끈적끈적 합니다.

9 단계 : 댐핑 폼을 사용하여 Pixhawk Mini를 프레임에 부착합니다.
Pixhawk는 화살표가 프레임 전면을 향하도록 방향을 맞추어야야 합니다.
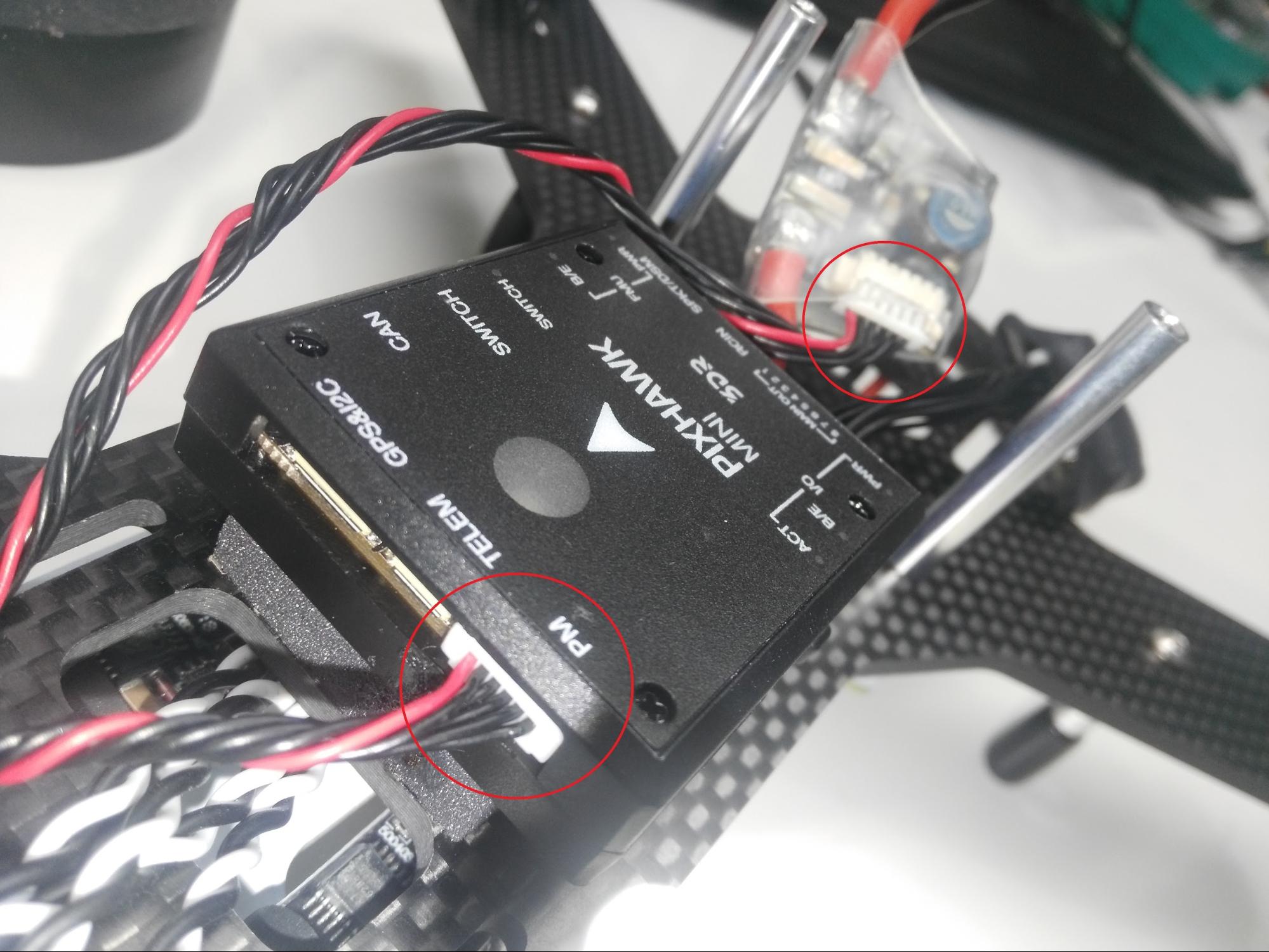
10 단계 : 전원 모듈을 연결합니다.
제공된 6 핀 케이블을 사용하여 전원 모듈과 Pixhawk Mini를 연결합니다 (그림 참조). Pixhawk Mini 키트의 전원 모듈을 사용하는 경우 동일한 방법으로 연결됩니다.
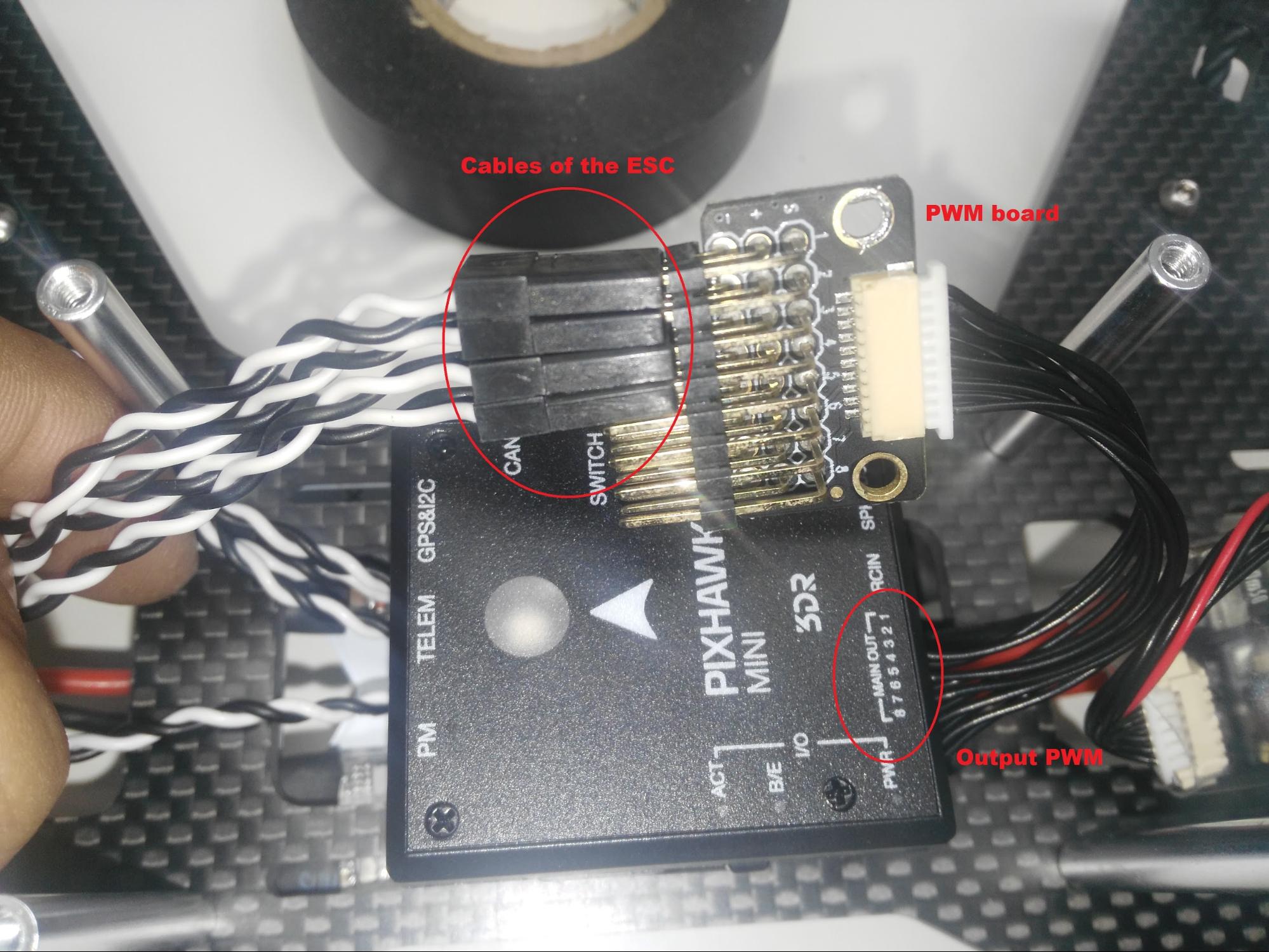
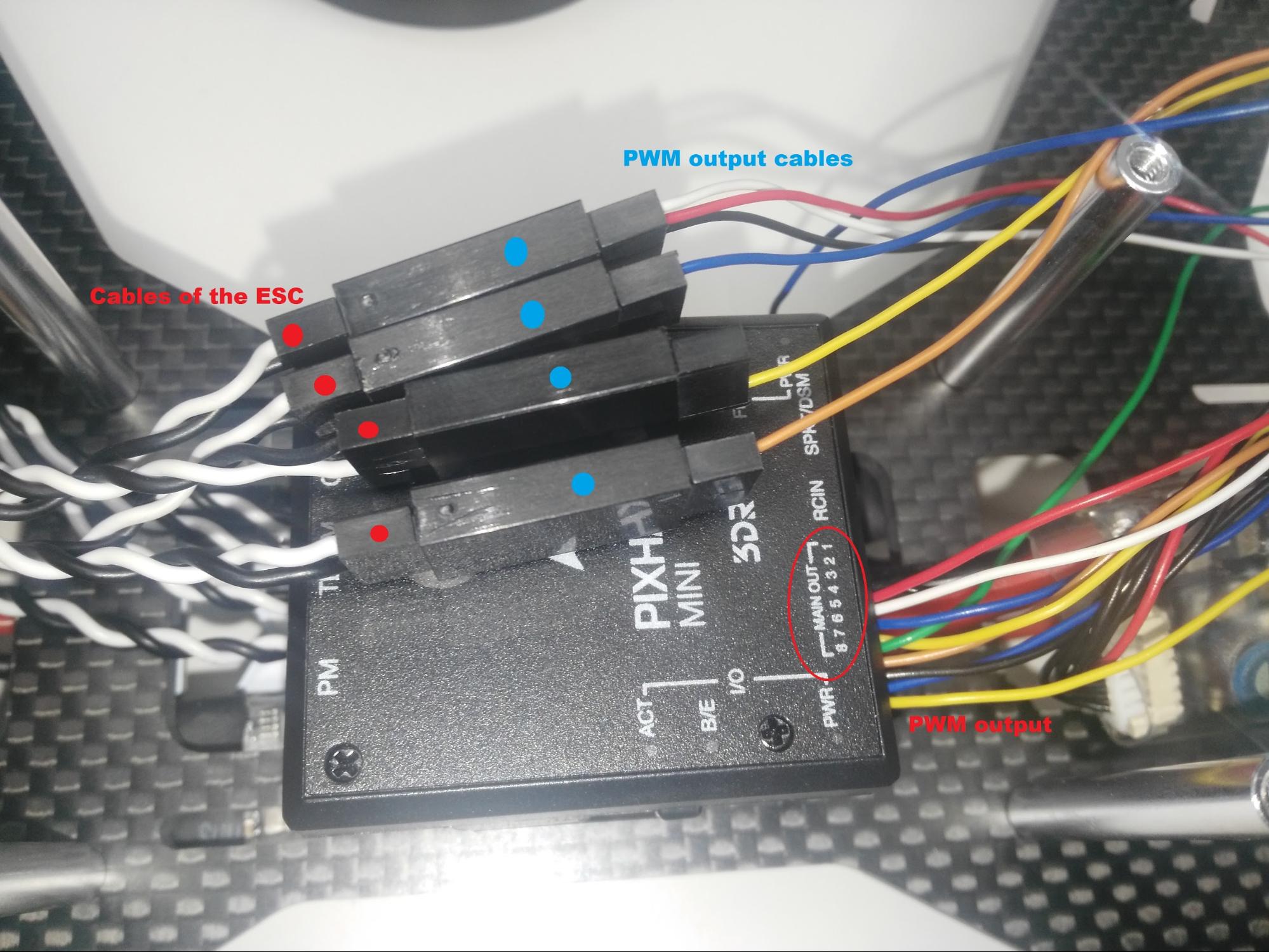
11 단계 : ESC를 PWM 출력에 연결
아래 그림과 같이 PWM 출력 케이블 또는 PWM 보드를 사용하여 ESC를 Pixhawk Mini에 올바른 순서로 연결합니다(둘 다 Pixhawk Mini에 제공됨).
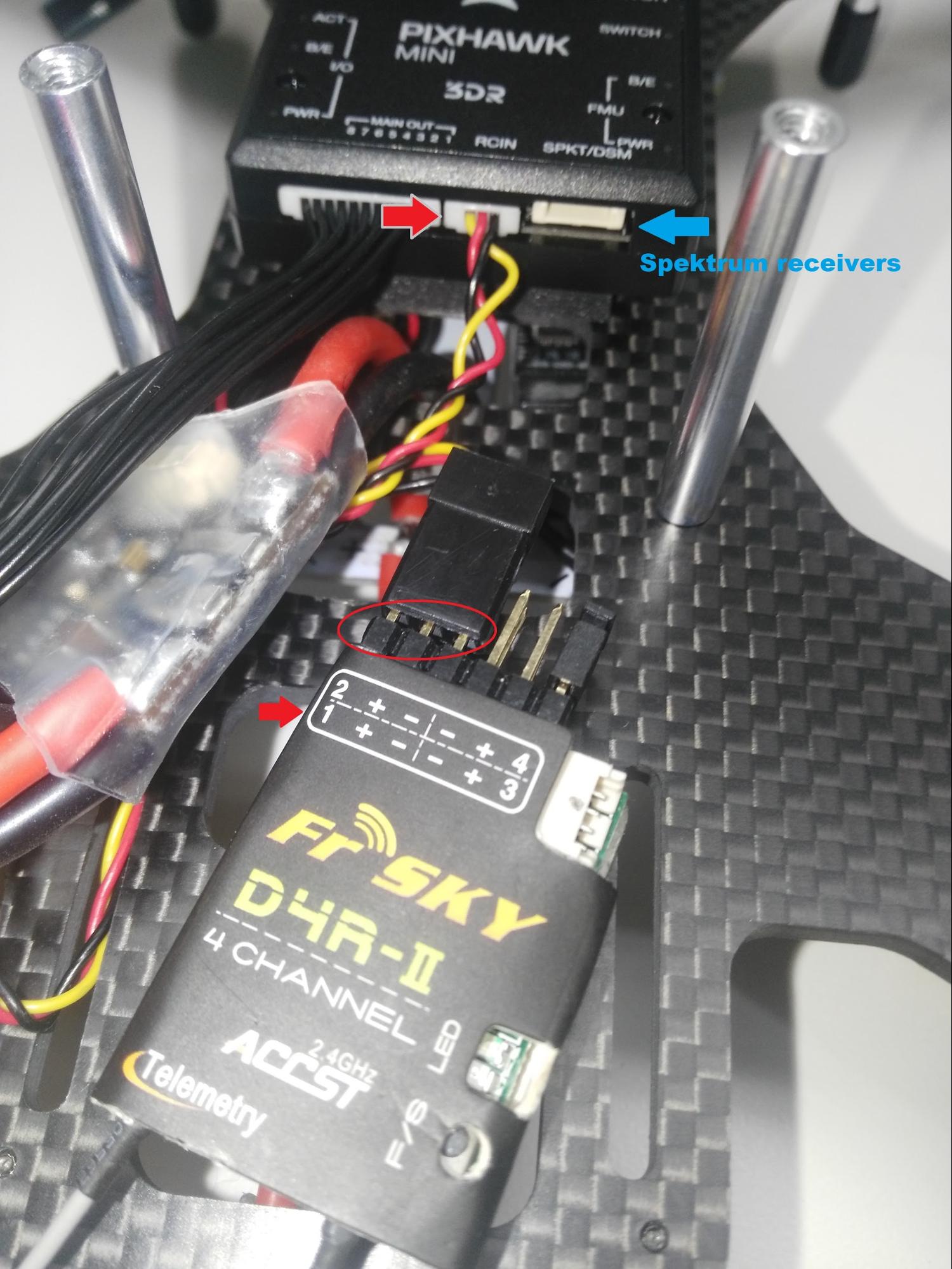
12 단계 : 수신기를 연결합니다.
FRSky D4-R 수신기 채널 1을 Pixhawk Mini의 RCIN 포트에 연결합니다 (그림 참조).
Note
수신기에 대한 참고 사항 :
- Pixhawk Mini RCIN 포트는 PPM 입력(예 : 멀티 플렉스 채널)을 수용합니다. PWM 수신기 (각 채널에 대한 개별 케이블 포함)를 사용할 수 있지만, 이와 같은 (opens new window) PPM 인코더를 통해 연결해야합니다.
- Spektrum 수신기를 사용할 수 있습니다. Pixhawk Mini의 RCIN 옆에있는 SPKT/DSM 입력에 연결됩니다.
- 자세한 내용은 Pixhawk Mini 수신기 호환성을 참조하십시오. :::
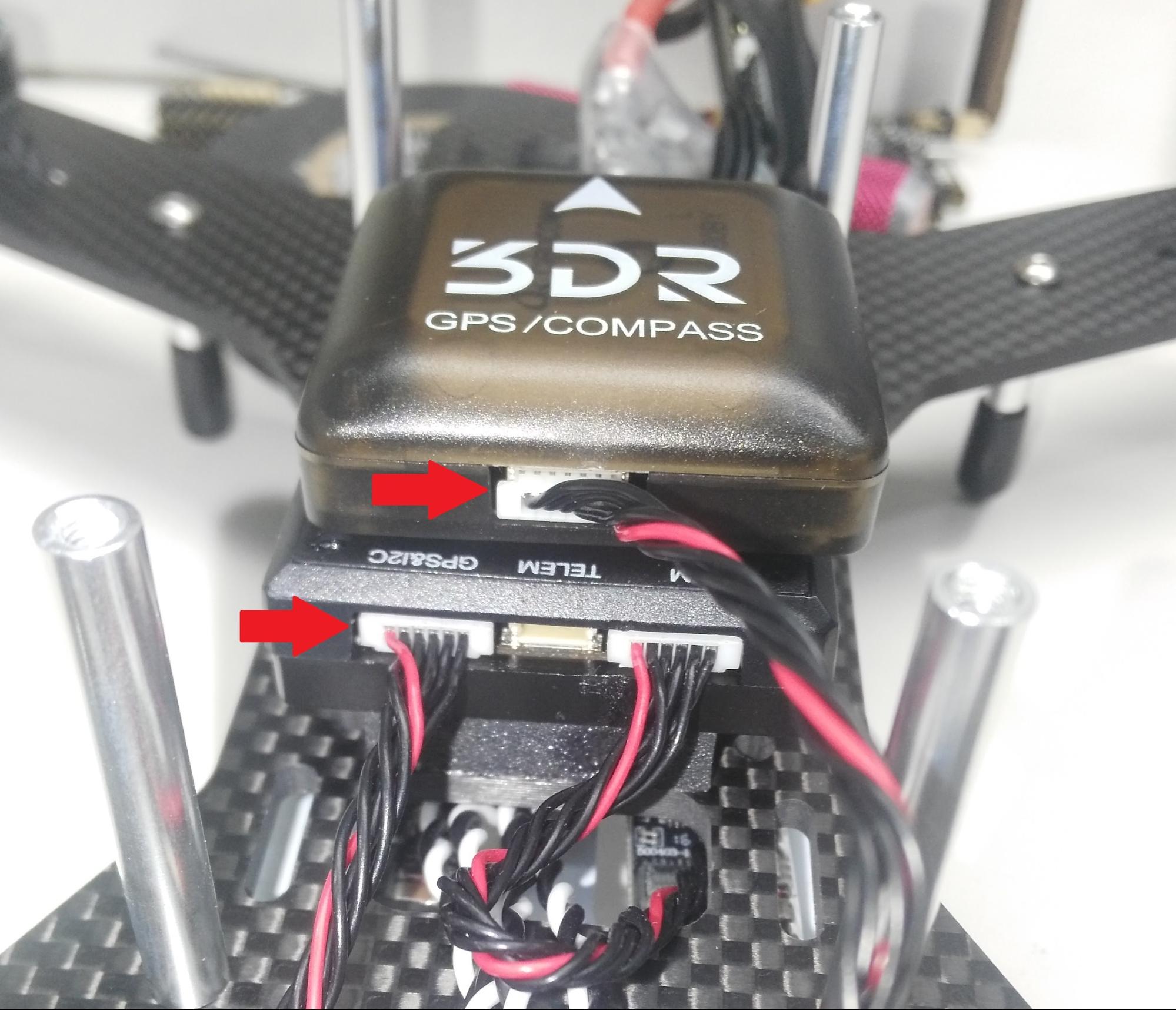
13 단계 : GPS/콤파스 모듈 연결
아래와 같이 GPS/콤파스 모듈을 Pixhawk Mini의 GPS & amp; I2C 포트에 연결합니다.
14 단계 : GPS/콤파스 모듈 장착
비행 컨트롤러 커버 플레이트 (프레임 조립 지침 참조)를 부착 한 다음 화살표가있는 커버 플레이트에 GPS 모듈을 붙여 넣습니다 (키트에 포함 된 붙여 넣기).

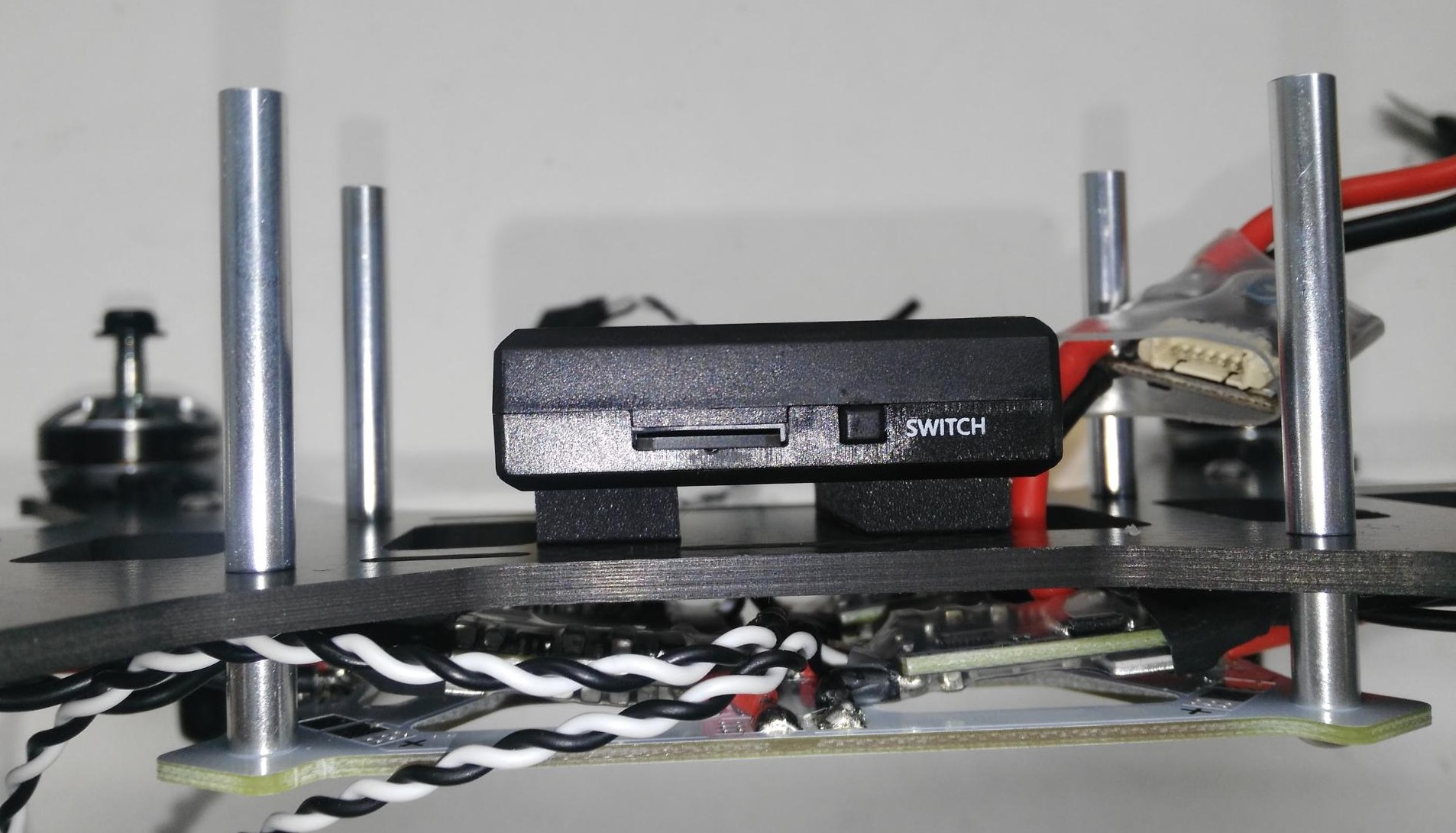
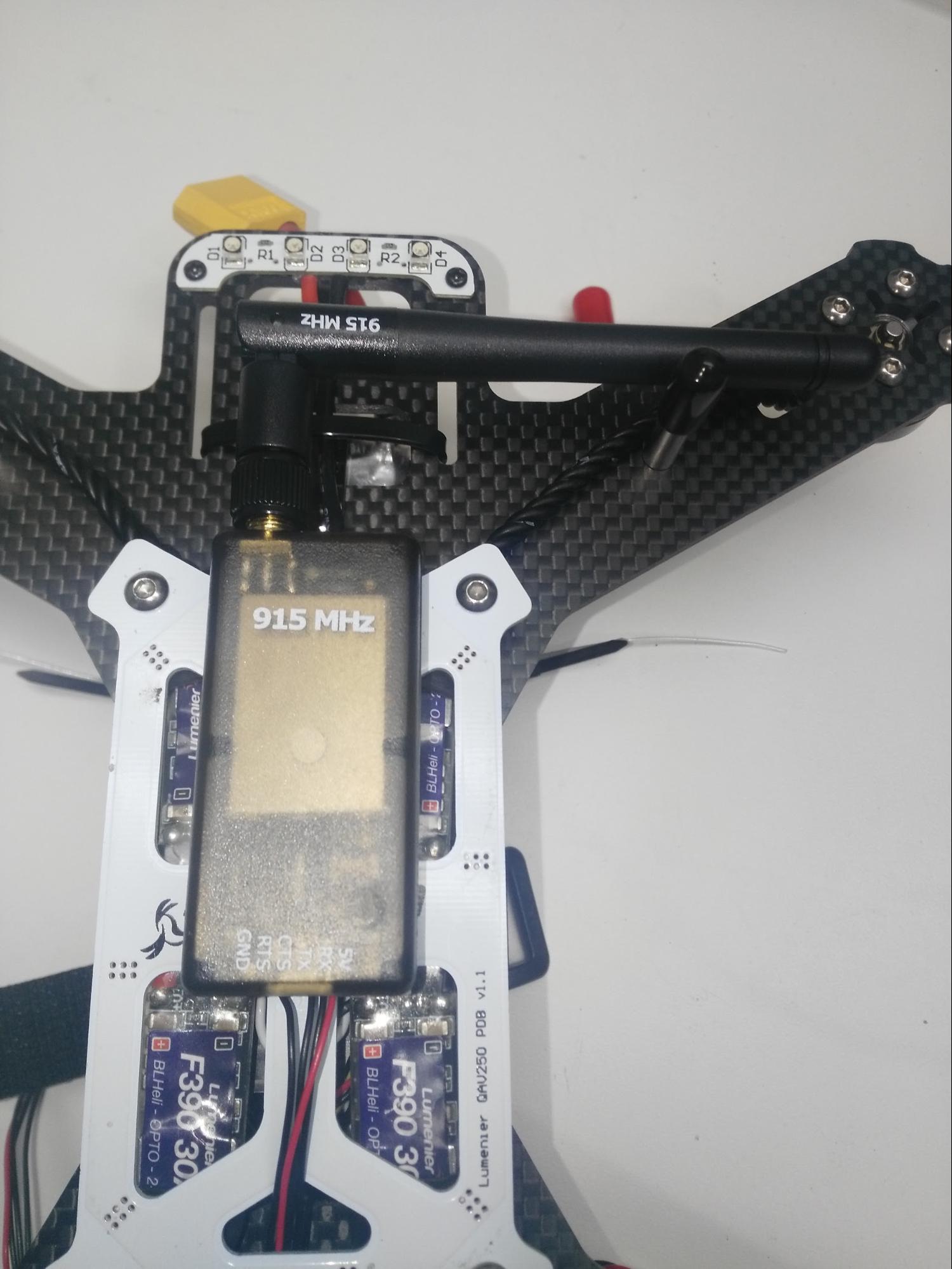
15 단계 : 텔레메트리 연결 및 장착 (선택 사항)
그림과 같이 원격 측정 라디오를 Pixhawk Mini TELEM 포트에 연결합니다.
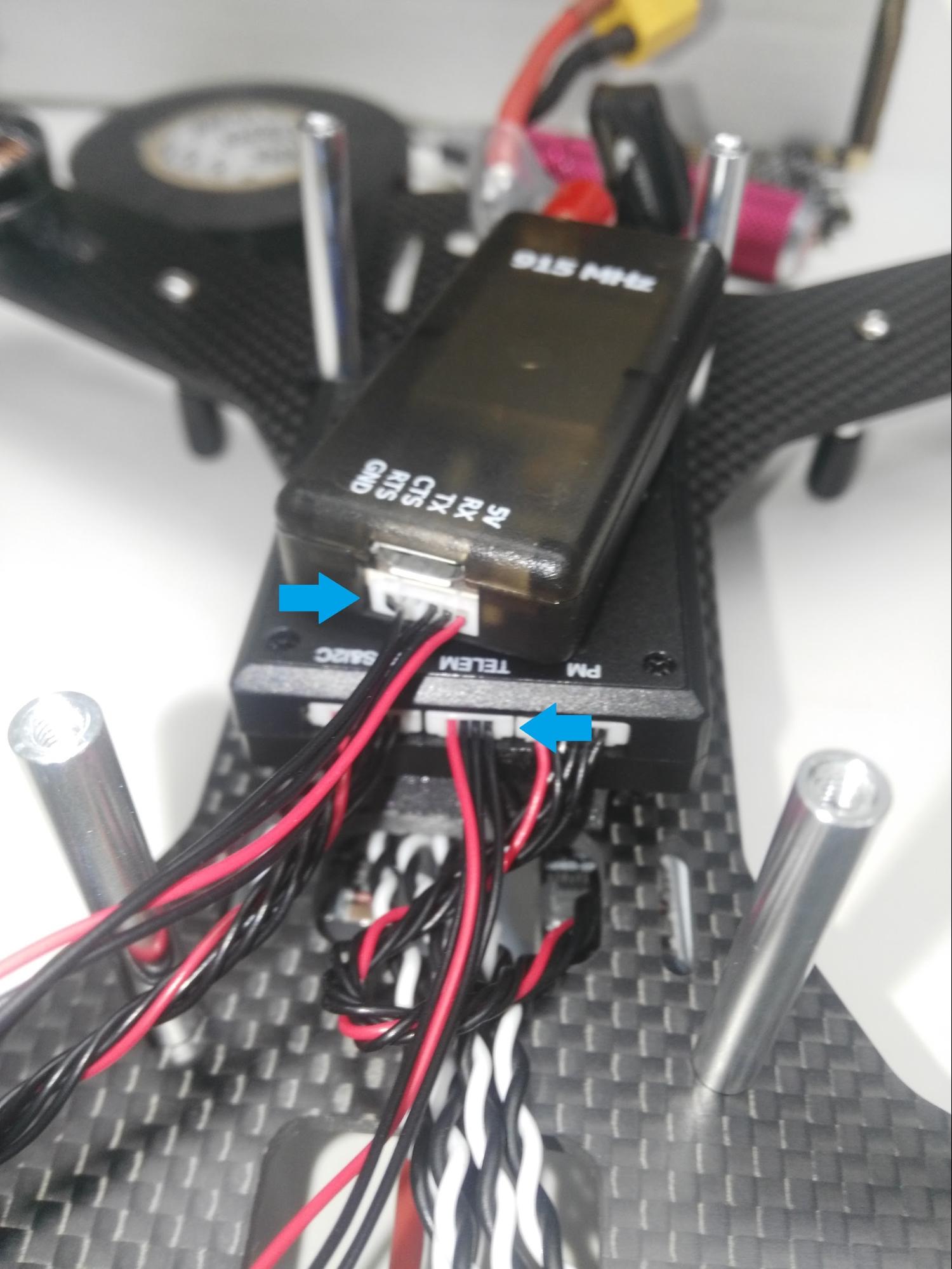
그런 다음 원격 측정 라디오 키트에 포함 된 양면 테이프를 사용하여 라디오를 장착합니다 (이 조립 경우에는 아래의 그림과 같이 PDB 아래에 무선장치를 장착하였습니다).
16 단계 : 팔에 착지 스탠드오프 부착

17 단계 : 배터리 폼과 벨크로 배터리 스트랩을 커버 플레이트에 부착합니다 (배터리 스트랩과 폼은 프레임 키트와 함께 제공됨).

이제 프레임의 조립이 완료되었습니다! 다음 단계에서는 PX4 자동조종 장치를 설치하고 구성할 수 있습니다.
# PX4 설치 및 구성
이 섹션에서는 QGroundControl (opens new window)을 사용하여 PX4 자동 조종 장치를 설치하고 QAV250 프레임에 맞게 구성/조정하는 방법을 설명합니다.
Note
QGroundControl을 사용하여 자동조종 장치를 설치 및 구성하고 임무를 계획하고 기체를 원격으로 제어할 수 있습니다. :::
QGroundControl을 다운로드후에 설치 (opens new window) 하십시오.
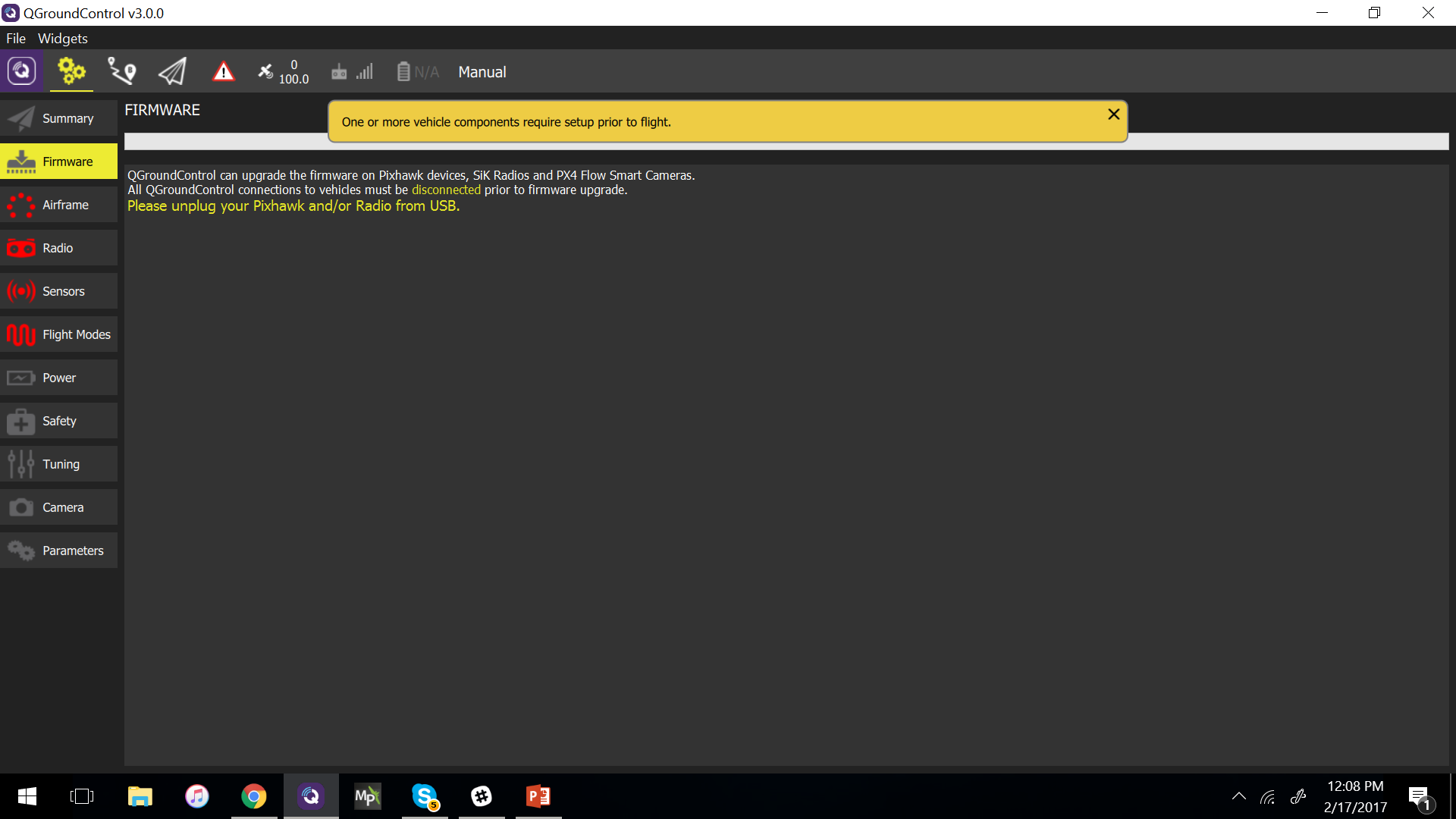
# 펌웨어 업데이트
Lumenier QAV250 용으로 구성된 PX4 펌웨어로 Pixhawk Mini를 업데이트합니다.
1 단계 : QGroundControl의 사이드 바에서 펌웨어를 선택합니다. 기체를 USB 포트에 연결합니다.
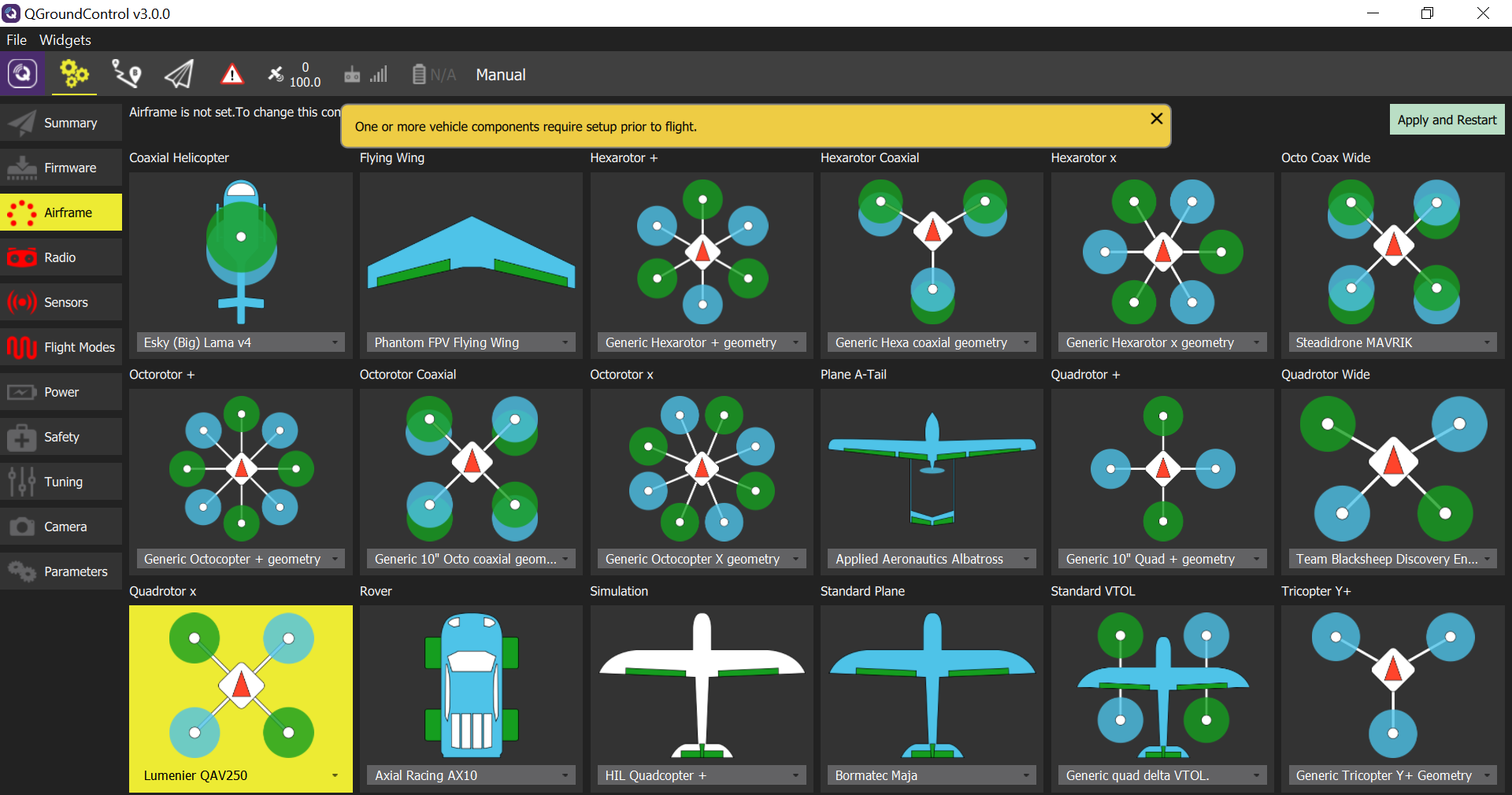
2 단계 : 기체를 선택합니다 (Quadrotor x > Lumenier QAV250).
적용 및 재시작을 클릭하십시오.
Note
추가 정보는 다음을 참조하십시오.
# 기체 보정/설정
기체의 보정/설정 방법은 대부분 모든 차량에서 유사합니다. 아래 지침을 따르거나, Autopilot 구성을 참조할 수 있습니다.
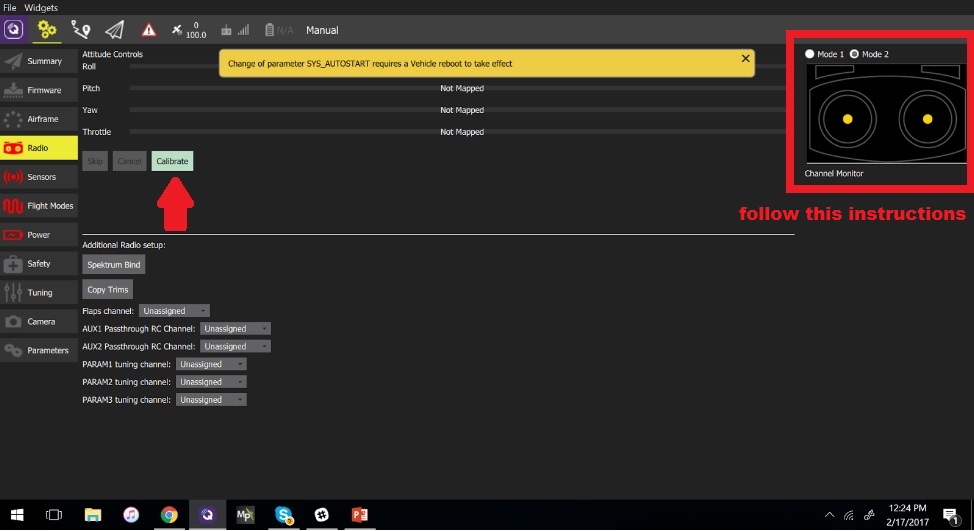
3 단계 : 무선 조종기 보정
- 리모콘을 켜십시오.
- 왼쪽 사이드 바에서 라디오를 선택합니다.
- 리모컨의 "모드"를 선택하십시오 (오른쪽 상단).
- 보정 버튼을 클릭하고 화면의 지시를 따릅니다.
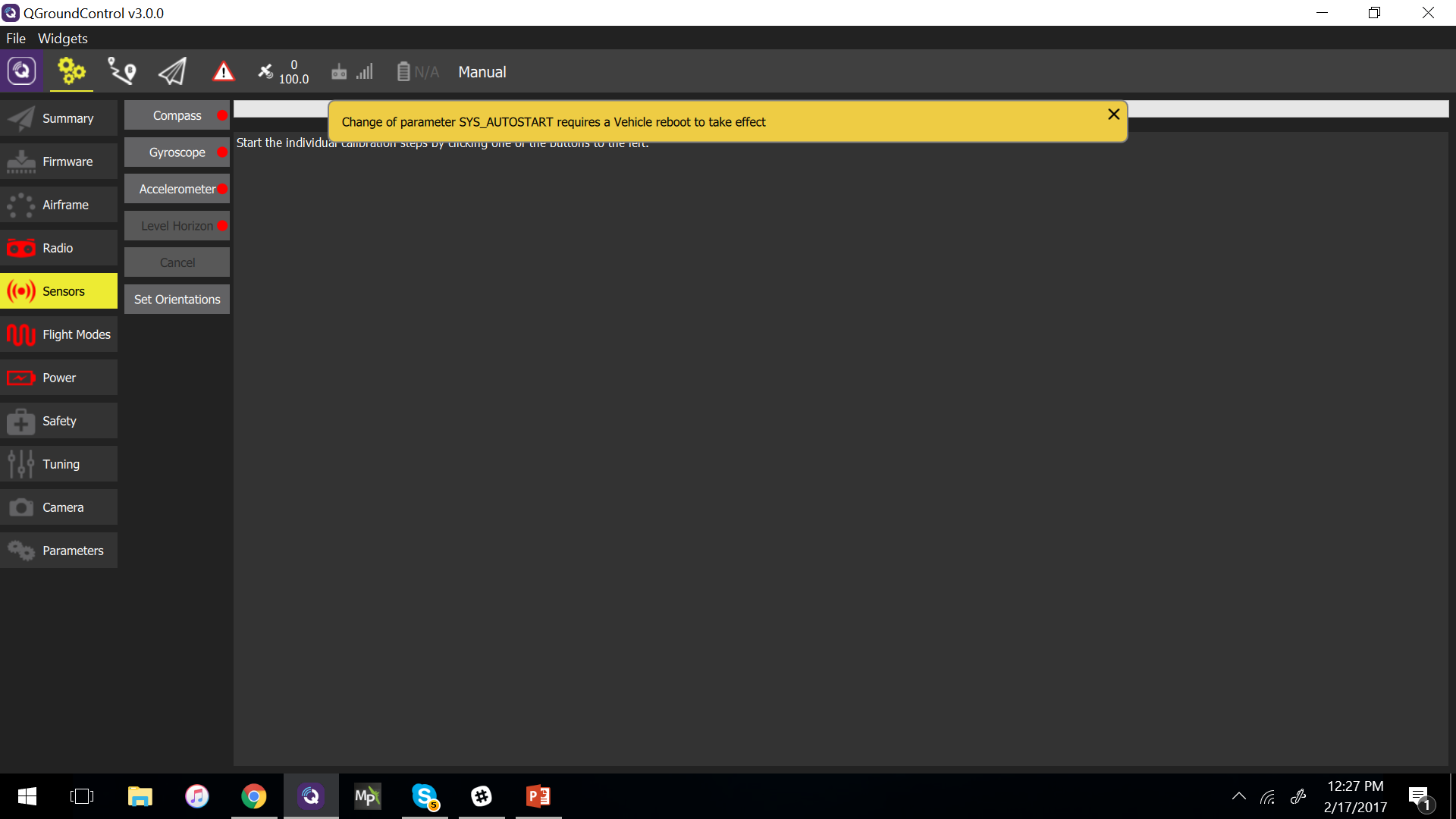
4 단계 : 센서 보정
- 왼쪽 사이드 바에서 센서를 선택합니다.
- 나침반 버튼을 선택한 다음 화면의 지시를 따릅니다.
- 자이로스코프 버튼을 선택한 다음 화면의 지시를 따릅니다.
- 가속도계 버튼을 선택한 다음 화면의 지시를 따릅니다.
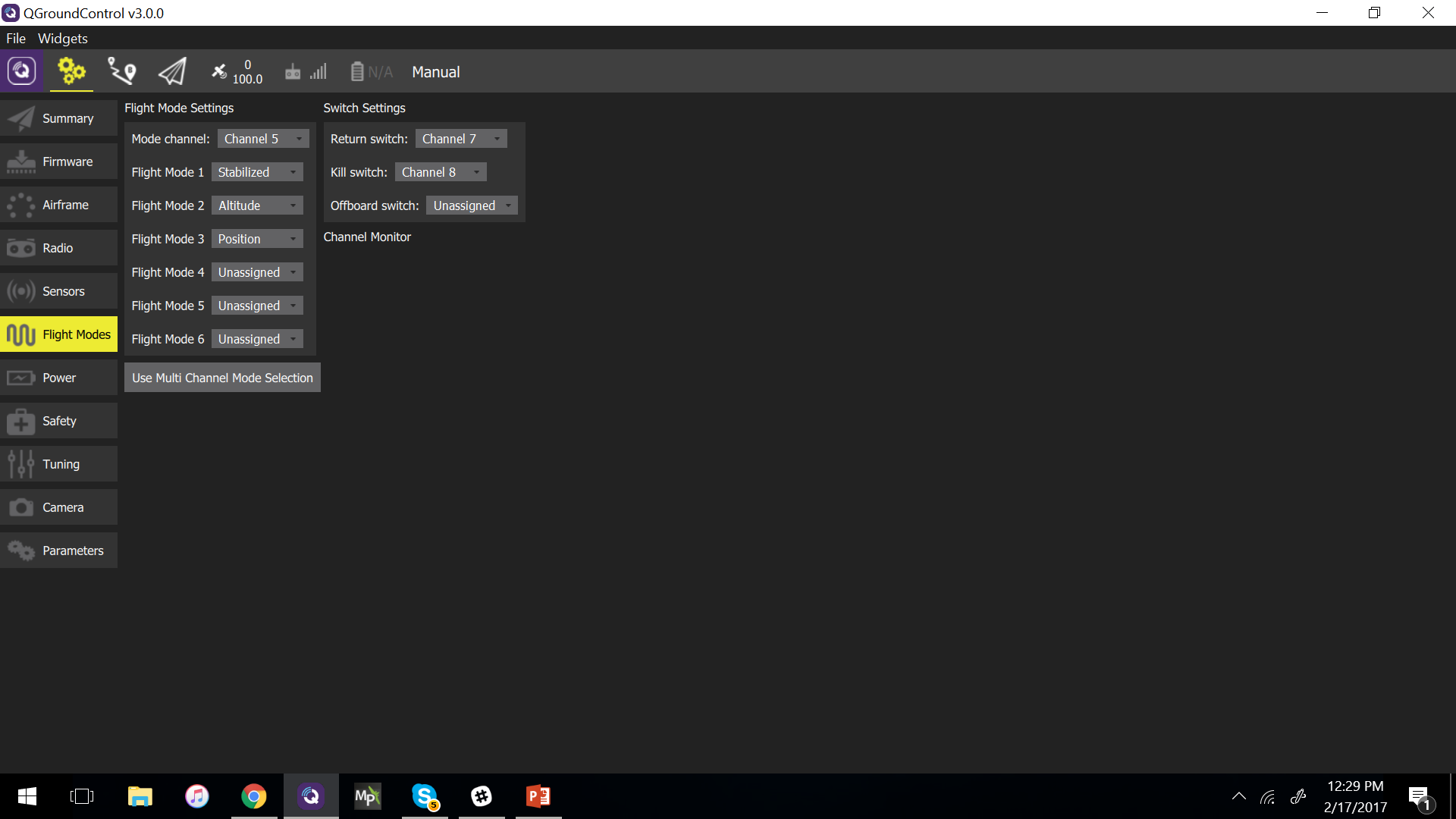
5 단계 : 비행 모드를 선택합니다.
비행 모드는 수동 조종 보조 기능 또는 완전 자율 비행 기능을 제공합니다. 신규 사용자는 다음 세 가지 모드를 지원하도록 수신기를 구성하여야 합니다 (이로 인해 차량을 훨씬 쉽게 비행 할 수 있음).
- 안정화 모드-차량을 뒤집기 어렵고 스틱을 놓으면 수평이됩니다 (정지 위치가 아님).
- 고도 - 상승 및 하강이 최대 속도로 제어됩니다.
- 위치 - 스틱을 놓으면 차량이 정지합니다. (그리고 바람 드리프트에 대한 위치 유지).
비행 모드를 구성하는 방법에는 여러 가지가 있습니다. 이 경우 단일 채널 (5)에 매핑하는 수신기에 3 방향 스위치가 있습니다.
더 자세한 정보는 다음을 참고하세요.
- 비행 모드 설정
- 비행 모드
- 비행 모드 (opens new window) (QGroundControl)
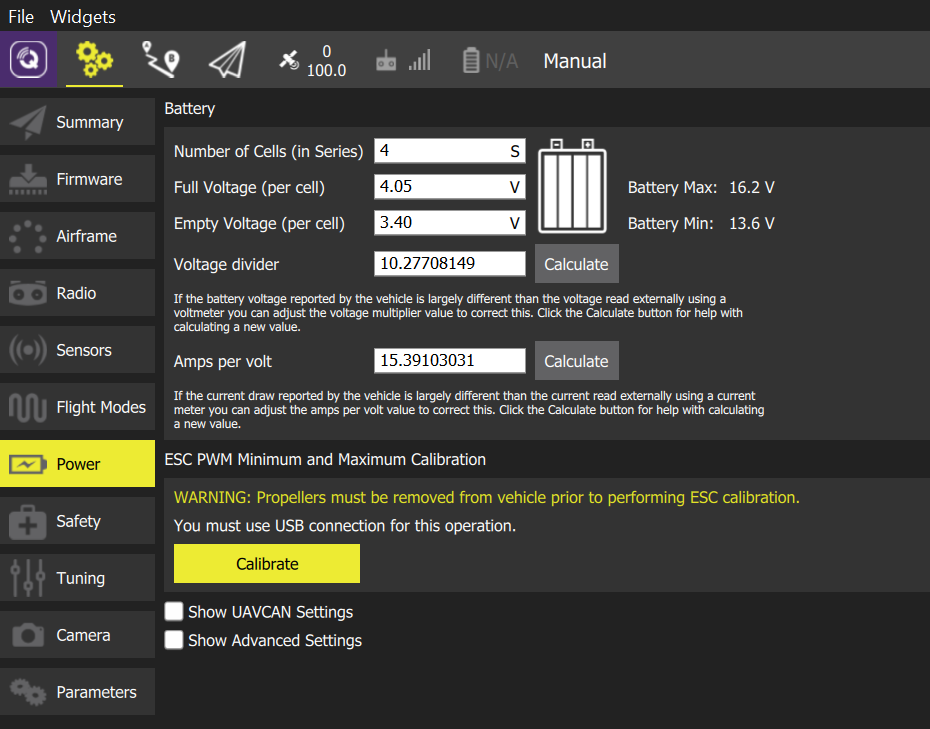
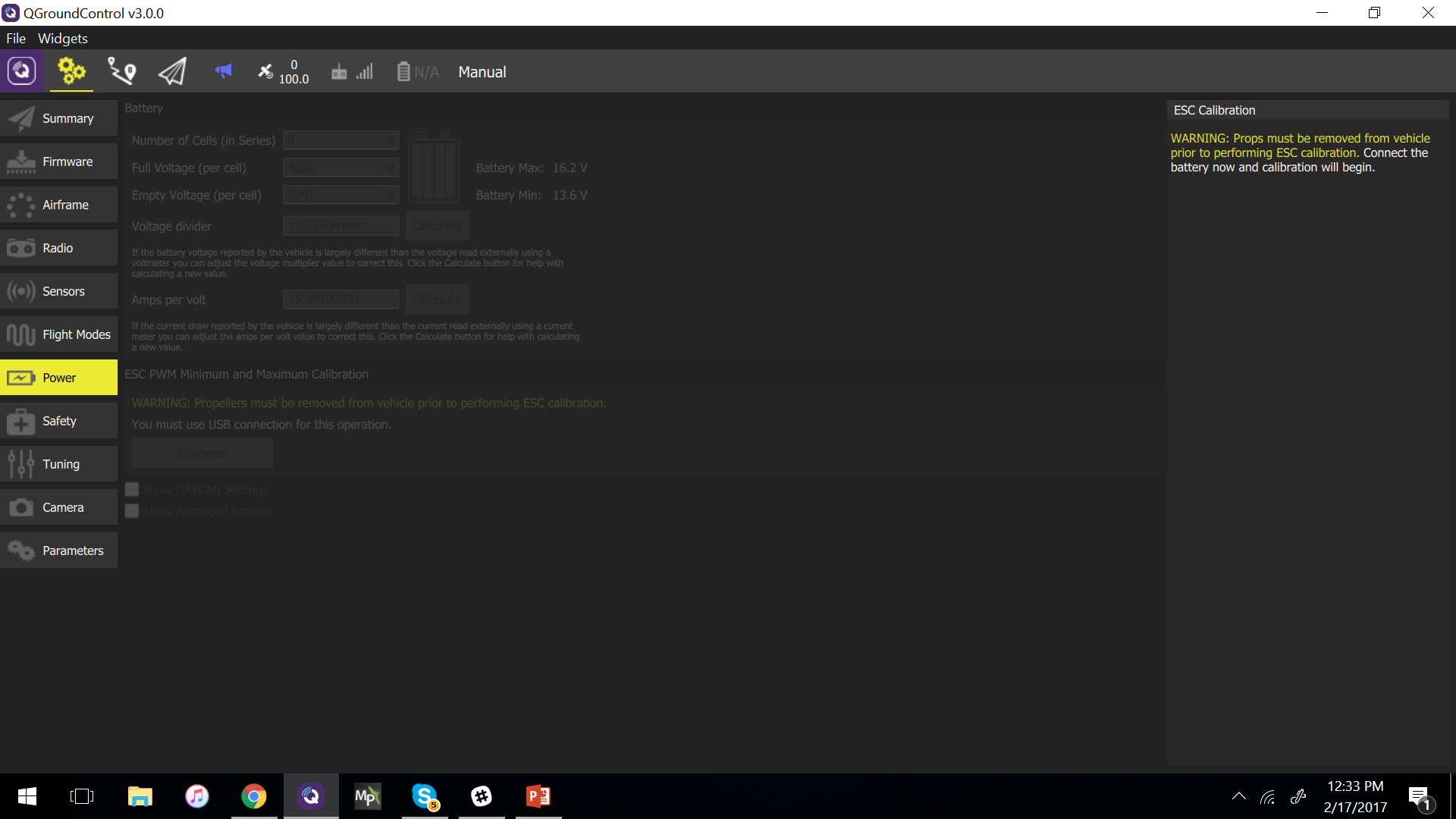
6 단계 : ESC 보정
프로펠러 제거.
WARNING
ESC 보정을 수행하기 전에 프로펠러를 기체에서 제거하여야 합니다!
왼쪽 사이드 바에서 전원을 선택합니다.
보정 버튼을 선택한 다음 화면의 지침을 따릅니다. 배터리를 연결합니다. 신호음이 멈추면 확인을 누르고 배터리를 분리합니다.
# 튜닝
펌웨어 설치는 선택한 프레임 (이 경우 Lumenier QAV250의 경우)에 대해 구성된 기본 자동조종장치 매개 변수를 설정합니다. 조립 방법에 따라 다른 부품들을 사용하고 다르게 배치 할 수 있으므로, 특정 기체 조립에 관련된 매개 변수를 조정하는 것이 좋습니다.
아래 매개 변수는 이 조립법에 권장됩니다 (노란색 매개 변수는 변경된 매개 변수입니다). 비행 테스트를 통해 생성되었습니다.
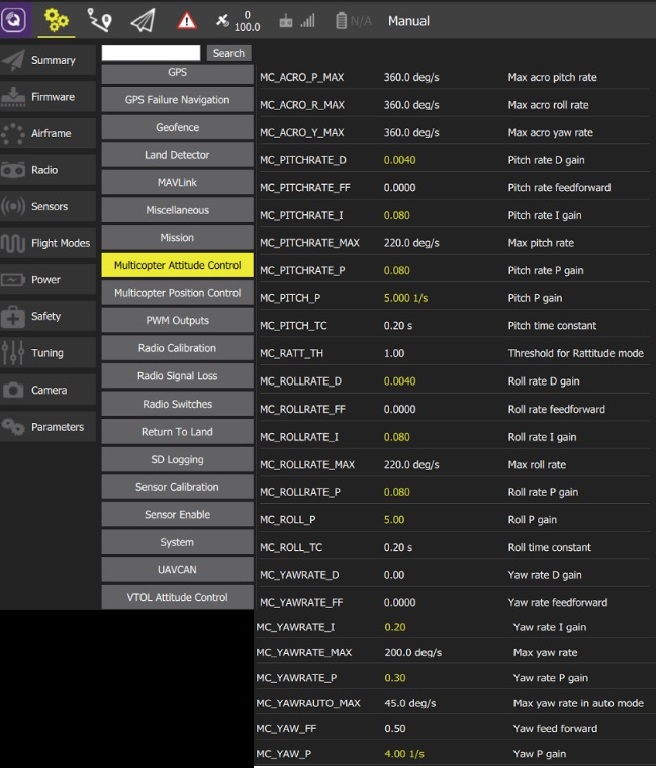
튜닝 정보는 멀티 콥터 PID 튜닝 가이드를 참조하십시오.
# 비디오
아래 비디오는 QAV250 테스트 비행을 보여줍니다.
# 감사의 글
이 조립 방법은 Abimael Suarez, 3DRobotics에서 제공하였습니다. 비디오는 Santiago Escala, 3DRobotics에서 제공하였습니다.