# Multicopter PID Tuning Guide (Manual/Advanced)
PX4 컨트롤러의 튜닝 방법에 대한 자세한 정보를 제공합니다.
TIP
Autotune is recommended for tuning the vehicles around the hover thrust point, as the approach described is intuitive, easy, and fast. 이것은 대부분의 기체에 필요합니다.
호버 추력 지점 주변의 튜닝이 충분하지 않을 때 이 가이드를 사용하십시오 (예 : 더 높은 추력에서 비선형성 및 진동이 방생하는 기체). 기본 튜닝을 충분히 이해하는 것이 airmode 설정 사용법을 이해하는데 유용합니다.
# 튜닝 단계
Note
안전상의 이유로 기본 게인은 낮은 값으로 설정됩니다. 적절한 제어 응답을 얻기 위해서는 게인 값을 적절하게 증가시켜야 합니다.
튜닝시 준수할 일반적인 사항은 아래와 같습니다.
- 큰 이득은 위험한 진동을 발생시킬 수 있으므로, 모든 이득은 매우 천천히 증가시켜야합니다! 일반적으로 반복당 이득을 20~30%씩 증가시키고, 최종 미세 조정을 위해 5~10%로 줄입니다.
- 매개변수를 변경하기 전에 착륙시키십시오. 스로틀을 천천히 증가시키고 진동을 점검하십시오.
- 호버링 추력 지점을 중심으로 기체를 조정하고, 추력 곡선 매개 변수를 사용하여 추력 비선형성 또는 높은 추력 진동을 설명합니다.
- 선택적으로 SDLOG_PROFILE 매개변수로 고속 로깅 프로필을 활성화하면 로그를 사용하여 비율과 태도 추적 성능을 평가할 수 있습니다 (이 옵션은 나중에 비활성화 할 수 있음).
WARNING
기체 튜닝시 항상 MC_AIRMODE를 비활성화 하십시오.
# 속도 컨트롤러
속도 컨트롤러는 기체 속도(요, 피치, 롤)를 제어하는 3 개의 독립적인 PID 컨트롤러를 가지고 있는 가장 안쪽의 루프입니다.
Note
훌륭하게 튜닝된 속도 컨트롤러는 모든 비행 모드에 영향을 미치므로 매우 중요합니다. 예를 들어, 잘못 튜닝한 속도 컨트롤러는 위치 모드에서 "twitches"로 표시됩니다 (기체가 공중에서 완벽하게 정지하지 않음).
# 속도 컨트롤러 아키텍처/양식
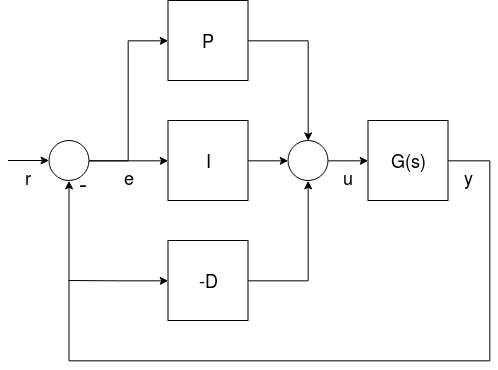
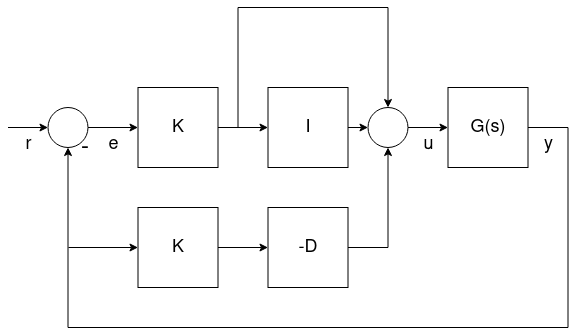
PX4는 단일 "혼합" 구현(병렬 및 표준)에서 두 가지 (수학적으로 동등한) 형태의 PID 속도 컨트롤러를 지원합니다.
사용자는 다른 형식의 비례 이득을 "1"로 설정하여 사용되는 형식을 선택할 수 있습니다 (즉, 아래 다이어그램에서 병렬 형식의 경우 K을 1로 설정하거나 P 표준 형식의 경우 1로 설정하여 K 또는 P 블록을 한 줄로 바꿉니다).
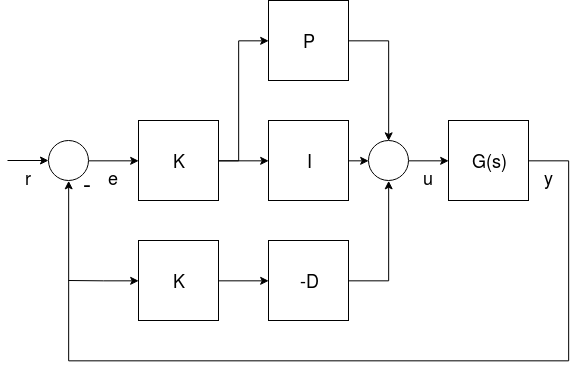
- *G(s)*는 기체의 각속도를 나타냅니다.
- r은 속도 설정점입니다.
- y는 신체 각속도 (자이로로 측정)입니다.
- e는 속도 설정값과 측정 속도 사이의 오류입니다.
- u는 PID 컨트롤러의 출력입니다.
두 가지 형식이 아래에 기술되어 있습니다.
Note
미분항(D)은 미분 킥 (opens new window) 효과를 회피하기 위하여 피드백 경로에 위치합니다.
TIP
자세한 내용은 아래의 내용을 참조하십시오.
- 모든 PID 컨트롤러가 같지 않습니다. (opens new window) (www.controleng.com)
- PID 컨트롤러 > 표준 대 병렬 (이상적인) PID 형식 (opens new window) (Wikipedia)
# 병렬 형식
병렬 형식은 가장 간단한 형식으로 교과서에서 많이 사용됩니다. 이 경우 컨트롤러의 출력은 간단한 비례, 적분 및 미분 동작의 합입니다.
# 표준 형식
이 형식은 병렬 형식과 수학적으로 동일하지만 주요 이점은 (반 직관적으로 보일지라도) 비례 이득 튜닝을 적분과 미분 이득에서 분리하는 것입니다. 즉, 비슷한 크기와 관성을 가진 드론의 이득을 취하고 K 이득을 조정하여 적절하게 비행하는 방법으로 새로운 플랫폼을 쉽게 조정할 수 있습니다.
# 속도 PID 튜닝
PID 속도 컨트롤러 튜닝 매개 변수는 다음과 같습니다.
- Roll 속도 제어 (MC_ROLLRATE_P, MC_ROLLRATE_I, MC_ROLLRATE_D, MC_ROLLRATE_K)
- Pitch 속도 제어 (MC_PITCHRATE_P, MC_PITCHRATE_I, MC_PITCHRATE_D, MC_PITCHRATE_K)
- Yaw 속도 제어 (MC_YAWRATE_P, MC_YAWRATE_I, MC_YAWRATE_D, MC_YAWRATE_K)
속도 콘트롤러는 곡예 모드와 수동/안정 모드에서 튜닝할 수 있습니다.
- 곡예 모드 는 비행 조종이 어렵습니다. 이 모드를 선택하는 경우 모든 스틱 엑스포를 비활성화하십시오.
MC_ACRO_EXPO= 0,MC_ACRO_EXPO_Y= 0,MC_ACRO_SUPEXPO= 0,MC_ACRO_SUPEXPOY= 0MC_ACRO_P_MAX= 200,MC_ACRO_R_MAX= 200MC_ACRO_Y_MAX= 100
- 수동/안정 모드는 비행이 용이하지만, 자세 또는 속도 컨트롤러에 어느 정도의 튜닝이 필요한지 확인하는 것이 어렵습니다.
기체 비행이 되지 않는 경우:
- 첫 이륙 시도시 (비행하지 않는 지점까지) 강한 진동이 있으면, 이륙이 성공할 때 까지 P와 D 게인을 줄입니다.
- RC 움직임에 대한 반응이 미미하면 P 게인을 높입니다.
실제 튜닝은 *수동 모드 * 또는 곡예 모드에서 거의 동일합니다. 롤 및 피치에 대해 P와 D 게인을 반복적으로 조정한 다음 I 게인을 조정합니다. 처음에는 롤과 피치에 동일한 값을 사용할 수 있으며, 좋은 값을 얻은 후에는 롤과 피치 응답을 개별적으로 확인하여 미세 조정할 수 있습니다 (기체가 대칭인 경우 필요하지 않음). yaw의 경우 D를 0으로 둘 수 있다는 점을 제외하면 매우 유사합니다.
# 비례 이득 (P/K)
비례 이득은 추적 오류를 최소화하는 데 사용됩니다 (아래에서 P 또는 K를 참조하기 위하여 P를 사용합니다). 빠른 응답을 담당하므로 가능한 높게 설정하여야 하지만, 진동이 발생하지 않아야 합니다.
- P 게인이 너무 높은 경우, 고주파 진동이 나타납니다.
- P 게인이 너무 낮은 경우:
- 기체가 입력 변화에 느리게 반응합니다.
- 곡예 모드에서는 기체가 표류하므로, 레벨을 유지를 위하여 지속적으로 수정하여야 합니다.
# 미분 이득 (D)
D 미분 게인은 속도 댐핑에 사용됩니다. 오버 슈트를 제거하기 위하여 적절하게 높은 값으로 설정합니다.
- D 게인이 너무 높은 경우 : D 항이 소음을 증폭하기 때문에, 모터가 경련을 일으키고 뜨거워집니다.
- D 게인이 너무 낮은 경우 : 스텝 입력 후 오버 슈트가 나타납니다.
일반적인 값은 다음과 같습니다.
- 표준 형식 (P = 1) : K 값에 대하여 0.01 (4 "레이서)에서 0.04 (500 크기) 사이
- 병렬 형식 (K = 1) : P 값에 따라 0.0004에서 0.005 사이
# 적분 이득 (I)
I (적분) 이득은 오류 메모리를 유지합니다. I 항은 원하는 비율에 얼마 동안 도달하지 않으면 증가합니다. 중요하지만 (특히 곡예 모드를 비행시) 너무 높게 설정해서는 안 됩니다.
- I 게인이 너무 높으면 느린 진동이 나타납니다.
- I 게인이 너무 낮은 경우 : 차량을 한쪽으로 약 45도 기울이고 그대로 유지하여 곡예 모드에서 테스트하는 것이 가장 좋습니다. 같은 각도를 유지하여야 합니다. 뒤로 드리프트하면 I 게인을 늘립니다. 더 긴 시간 동안 원하는 속도와 실제 속도 사이에 오프셋이 있을 때 낮은 I 게인도 로그에 표시됩니다.
일반적인 값은 다음과 같습니다.
- 표준 형식 (P = 1) : K 값에 대하여 0.5 (VTOL 평면), 1 (500 크기) 및 8 (4 "레이서) 사이,
- 평행 형식 (K = 1) : P가 약 0.15 인 경우 0.3에서 0.5 사이 피치 게인은 일반적으로 롤 게인보다 약간 높아야 합니다.
# 테스트 절차
현재 이득을 테스트하려면 호버링시 빠른 단계 입력을 제공하고 기체의 반응을 관찰하십시오. 명령을 즉시 반등하여야 하며, 진동이나 오버슛이 발생하지 않아야 합니다 ( '고정'된 느낌).
예를 들어 롤용 스텝 입력을 만들 수 있습니다. 롤 스틱을 한쪽으로 빠르게 밀었다가 다시 빠르게 놓아줍니다 (스프링이므로 스틱을 놓으면 스틱도 진동합니다. 잘 튜닝된 기체는 이러한 진동에 반응합니다).
Note
곡예 모드에서 잘 튜닝된 기체는 한쪽으로 기울지 않지만, 수정 없이도 수십 초 동안 같은 자세를 유지합니다.
# 로그
로그는 추적 성능 평가에 많은 도움이 됩니다. 다음은 롤과 요 속도 추적의 좋은 예입니다.
![]()
![]()
다음은 극단적인 스텝 입력을 생성하는 몇 번의 플립으로 롤 속도를 추적하는 좋은 예입니다. 기체에 아주 적은 양의 오버 슈트가 발생하는 것을 볼 수 있습니다. ![]()
# 자세 컨트롤러
이것은 방향과 아래의 튜닝 매개변수를 사용하여 기체의 비율의 출력을 제어합니다.
- Roll 제어 (MC_ROLL_P)
- Pitch 제어(MC_PITCH_P)
- Yaw 제어 (MC_YAW_P)
자세 컨트롤러의 튜닝은 비교적 간단합니다. 대부분 기본값을 변경할 필요가 없습니다.
자세 컨트롤러를 튜닝시에는 수동/안정 모드로 비행하고 P 게인을 점진적으로 증가시킵니다. 진동이나 오버슈트가 나타나는 것은 게인이 너무 높은 것입니다.
아래의 매개변수를 조정할 수 있습니다. 세 축의 최대 회전 속도를 결정합니다.
- 최대 롤 회전속도(MC_ROLLRATE_MAX)
- 최대 피치 회전 속도 (MC_PITCHRATE_MAX)
- 최대 요 회전 속도 (MC_YAWRATE_MAX)
# 추력 곡선
위의 튜닝은 호버 스로틀 주위의 성능을 최적화합니다. 그러나 풀 스로틀로 갈 때 진동이 시작될 수 있습니다.
이를 막으려면 THR_MDL_FAC 매개 변수로 추력 곡선을 조정하십시오.
Note
이 매개변수를 변경하면 속도 컨트롤러를 다시 조정하여야 할 수 있습니다.
모터 제어 신호 (예 : PWM)에서 예상 추력으로의 매핑은 기본적으로 선형입니다. THR_MDL_FAC를 1로 설정하면 2 차가됩니다. 그 사이의 값은 둘의 선형 보간을 사용합니다. 일반적인 값은 0.3 ~ 0.5 입니다.
If you have a thrust stand (opens new window) measure thrust and motor commands simultaneously), you can determine the relationship between the motor control signal and the motor's actual thrust, and fit a function to the data. actuator_output이라고하는 PX4의 모터 명령은 사용중인 각 ESC에 대한 PWM, Dshot, UAVCAN 명령 일 수 있습니다. This Notebook (opens new window) shows one way for how the thrust model factor THR_MDL_FAC may be calculated from previously measured thrust and PWM data. 이 플롯에 표시된 곡선은 α k, 실제 단위 (kgf 및 μs)로 추력과 PWM을 표시합니다. 곡선 맞춤 문제를 단순화하기 위해 α를 추정하지 않고도 k를 찾기 위해 0과 1 사이의 데이터를 정규화 할 수 있습니다(α = 1, 데이터가 정규화 될 때).

Note
PWM과 정적 추력간의 매핑은 배터리 전압에 따라 크게 달라집니다.
이 실험의 또 다른 방법은 정규화된 모터 명령과 추력 값의 산점도를 만들고 THR_MDL_FAC 매개변수로 실험하여 추력 곡선을 반복적으로 조정하는 것입니다. 해당 그래프의 예는 아래와 같습니다.

원시 모터 명령 및 추력 데이터가 실험의 전체 범위에 걸쳐 수집되는 경우, 다음 방정식을 사용하여 데이터를 정규화할 수 있습니다.
normalized_value = ( raw_value - min (raw_value) ) / ( max ( raw_value ) - min ( raw_value ) )
정규화된 값의 산점도를 얻은 후 방정식을 플로팅하여 곡선을 일치시킬 수 있습니다.
rel_thrust = ( THR_MDL_FAC ) * rel_signal^2 + ( 1 - THR_MDL_FAC ) * rel_signal
0과 1 사이의 정규화된 모터 명령 값의 선형 범위. 이것은 THR_MDL_FAC 매개변수 참조에 표시된 것처럼 추력과 모터 명령을 매핑하기 위해 펌웨어에서 사용되는 방정식입니다. 여기서 rel_thrust는 0과 1 사이의 정규화된 추력 값이고 rel_signal은 0과 1 사이의 정규화된 모터 명령 신호 값입니다.
위의 예에서 곡선은 THR_MDL_FAC가 0.7로 설정되었을 때 가장 좋은 결과를 나타내었습니다.
스러스트 스탠드에 접근할 수 없는 경우, 경험적으로 모델링 요소를 조정할 수 있습니다. 0.3부터 시작하여 한 번에 0.1 씩 늘립니다. 너무 높으면, 낮은 스로틀 값에서 진동이 감지되기 시작합니다. 너무 낮으면, 더 높은 스로틀 값에서 진동이 나타납니다.
# 에어 모드 & 믹서 포화
속도 컨트롤러는 세 축 (roll, pitch 및 yaw)에 대한 토크 명령과 스칼라 추력값을 출력하며, 이는 개별 모터 추력 명령으로 변환하여야 합니다. 이 단계를 믹싱이라고 합니다.
예를 들어 낮은 추력과 큰 롤 명령의 경우 모터 명령 중 하나가 음수가 될 수 있습니다 (비슷하게 100 % 이상이 될 수 있음). 이것은 믹서 포화입니다. 기체가 이 명령을 실행하는 것은 물리적으로 불가능합니다 (가역 모터 제외). PX4에는 이 문제를 해결하기 위한 두 가지 모드가 있습니다.
롤에 대한 명령된 토크를 줄여 모터 명령이 0 미만이 되지 않도록합니다 (에어 모드 비활성화 됨). 명령된 추력이 0 인 극단적인 경우에는 더 이상 자세 보정이 가능하지 않으므로이 모드에 항상 최소 추력이 필요합니다.
또는 명령된 추력을 증가시켜 모터 명령이 음수값이 되지 않도록 합니다(에어 모드 활성화). 이것은 낮은 스로틀이나 제로 스로틀에서도 자세/속도를 정확하게 추적할 수 있는 큰 장점이 있습니다. 일반적으로 비행 성능을 향상시킵니다.
그러나, 이는 스로틀이 0으로 감소하더라도 기체가 계속 상승하도록 총추력을 증가시킵니다. 잘 조정되고 올바르게 작동하는 기체에는 제외하고, 너무 높은 P 조정 이득으로 인하여 기체가 강하게 진동할 때 발생할 수 있습니다.
두 모드는 두 모터에 대한 2D 그림과 롤 r에 대한 토크 명령은 아래에 표시되어 있습니다. 왼쪽 모터에서는 r이 명령된 추력에 추가되고, 오른쪽 모터에서는 차감됩니다. 모터 추력은 녹색입니다. Airmode를 활성화하면 명령된 추력이 b 만큼 증가합니다. 비활성화되면, r이 감소합니다.

혼합이 상한선으로 포화되면, 명령된 추력이 감소되어 모터가 100 % 이상의 추력을 전달하지 않도록 합니다. 이 동작은 Airmode 로직과 유사하며 Airmode 활성화 여부에 관계없이 적용됩니다.
기체 비행이 성공적이면 MC_AIRMODE 매개변수를 통하여 에어 모드를 활성화 할 수 있습니다.