Snapdragon Advanced
This page is a collection of useful commands and instructions which might come in handy when working with the Snapdragon platform.
Connect to Snapdragon
Over FTDI
Connect the small debug header shipped with the Snapdragon and the FTDI cable.
On Linux, open a console using:
screen /dev/ttyUSB0 115200
Change USB0 to whatever it happens to be. Check /dev/ or /dev/serial/by-id.
Over ADB (Android Debug Bridge)
Connect the Snapdragon over USB2.0 and power it up using the power module. When the Snapdragon is running the, the LED will be slowly blinking (breathing) in blue.
Make sure the board can be found using adb:
adb devices
If you cannot see the device, it is most likely a USB device permission issue. Follow the instructions
To get a shell, do:
adb shell
DSP Debug Monitor
You can also run mini-dm provided by hexagon to see the output of the DSP:
${HEXAGON_SDK_ROOT}/tools/debug/mini-dm/Linux_Debug/mini-dm
Alternatively, especially on Mac, you can also use nano-dm.
Serial ports
Not all POSIX calls are currently supported on QURT. Therefore, some custom ioctl are needed.
The APIs to set up and use the UART are described in dspal.
Wi-Fi settings
These are notes for advanced developers.
Connect to the Linux shell (see console instructions).
Access point mode
If you want the Snapdragon to be a wifi access point (AP mode), edit the file: /etc/hostapd.conf and set:
ssid=EnterYourSSID
wpa_passphrase=EnterYourPassphrase
The passphrase must be at least 8 characters
Then configure AP mode:
/usr/local/qr-linux/wificonfig.sh -s softap
reboot
Station mode
If you want the Snapdragon to connect to your existing wifi, edit the file: /etc/wpa_supplicant/wpa_supplicant.conf and add your network settings:
network={
ssid="my existing network ssid"
psk="my existing password"
}
Then configure station mode:
/usr/local/qr-linux/wificonfig.sh -s station
reboot
Using the cameras on the Snapdragon Flight
The Snapdragon Flight board has a downward facing gray-scale camera which can be used for optical flow based position stabilization and a forward facing RGB camera. The snap_cam repo offers a way to run and stream the different cameras and calculate the optical flow.
Besides a camera, optical flow requires a downward facing distance sensor. Here, the use of the TeraRanger One is discussed.
Optical Flow
The optical flow is computed on the application processor and sent to PX4 through MAVLink. Clone and compile the snap_cam repo according to the instructions in its README.
Run the optical flow application (90 frames per second and auto exposure) as root:
./optical_flow -f 90 -a
The optical flow application requires IMU MAVLink messages from PX4. You may have to add an additional MAVLink instance to PX4 by adding the following to your mainapp.config:
mavlink start -u 14557 -r 1000000 -t 127.0.0.1 -o 14558
mavlink stream -u 14557 -s HIGHRES_IMU -r 250
TeraRanger One Setup
To connect the TeraRanger One (TROne) to the Snapdragon Flight, the TROne I2C adapter must be used. The TROne must be flashed with the I2C firmware by the vendor.
The TROne is connected to the Snapdragon Flight through a custom DF13 4-to-6 pin cable. We recommend using connector J15 (next to USB), as all others are already in use (RC, ESCs, GPS). The wiring is as follows:
| 4 pin | <-> | 6 pin |
|---|---|---|
| 1 | 1 | |
| 2 | 6 | |
| 3 | 4 | |
| 4 | 5 |
The TROne must be powered with 10 - 20V.
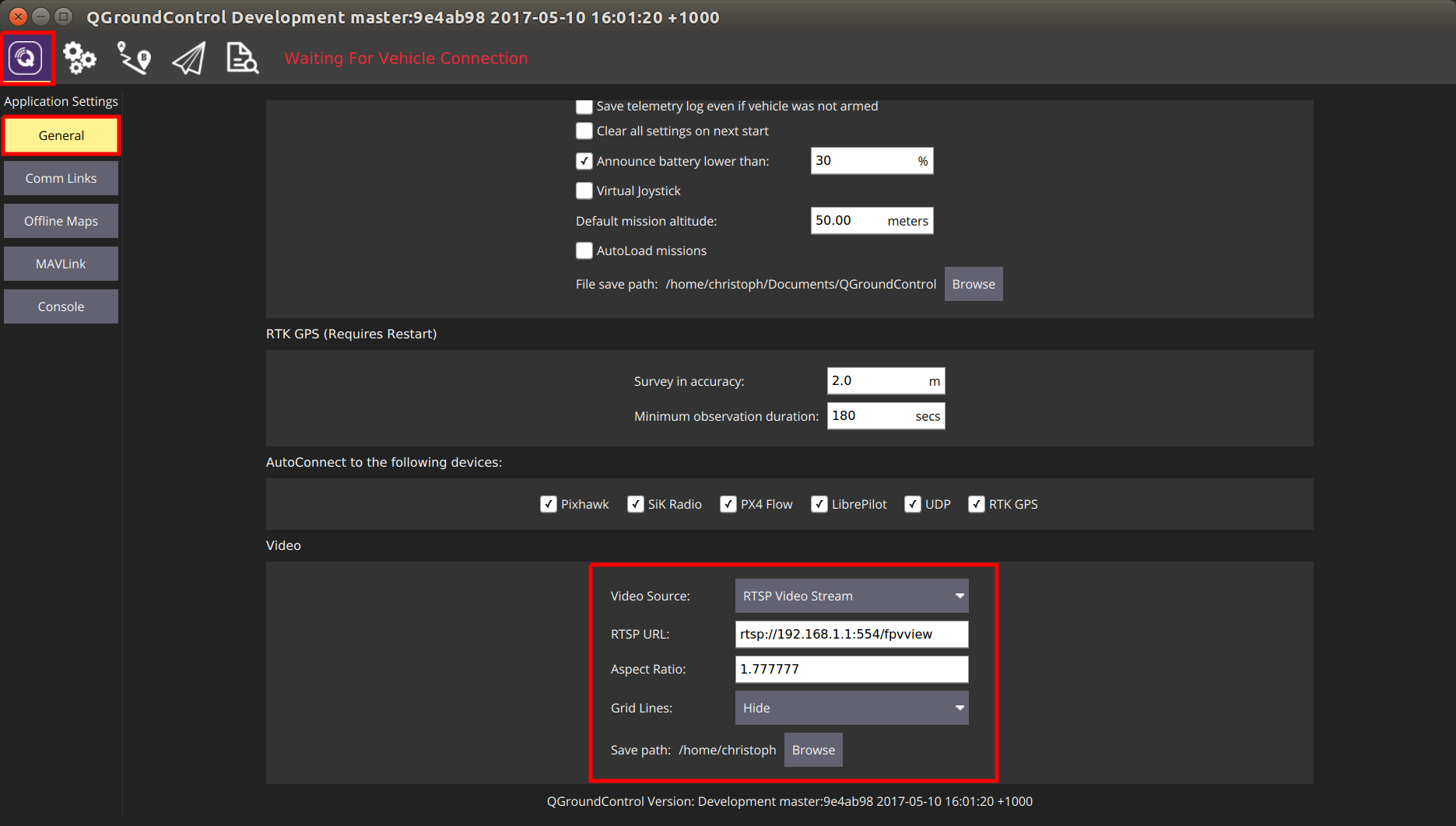
Camera Streaming in QGroundControl
To watch the live stream of either camera qcamvid can be used.
Run the following command on the Snapdragon Flight to stream the hires camera for 10 minutes without recording with a 720p resolution.
qcamvid -c hires -r 720p -s -t 600
Use qcamvid -h to have a look at all the options.
To watch the live stream in QGroundControl, it has to be built with gstreamer (see here).
Once installed and conneted to the Snapdragon Flight's network, the following changes have to be made in QGroundControl.
Accessing I/O Data
Low level bus data can be accessed from code running on the aDSP, using a POSIX-like API called DSPAL.
The header files for this API are maintained on github and are commented with Doxygen formatted documentation in each header file.
A description of the API's supported and links to the applicable header files is provided below.
API Overview
- Serial:
- I2C:
- SPI:
- GPIO:
- Timers: qurt_timer.h
- Power Control: HAP_power.h
Sample Source Code
The unit test code to verify each DSPAL function also represent good examples for how to call the functions.
This code is also on github
Setting the Serial Data Rate
The serial API does not conform to the termios convention for setting data rate through the tcsetattr() function. IOCTL codes are used instead and are
described in the header file linked above.
Timers
Additional functions for more advanced aDSP operations are available with the prefix qurt_.
Timer functions, for example, are available with the qurt_timer prefix and are documented in the qurt_timer.h header file included with the Hexagon SDK.
Setting the Power Level
Using the HAP functions provided by the Hexagon SDK, it is possible to set the power level of the aDSP. This will often lead to reduced I/O latencies. More information on these API's is available in the HAP_power.h header file available in the Hexagon SDK.
Troubleshooting
adb does not work
- Check permissions
- Make sure you are using a working Micro-USB cable.
- Try a USB 2.0 port.
- Try front and back ports of your computer.
USB permissions
Create a new permissions file
sudo -i gedit /etc/udev/rules.d/51-android.rulesPaste this content, which enables most known devices for ADB access:
SUBSYSTEM=="usb", ATTRS{idVendor}=="0bb4", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0e79", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0502", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0b05", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="413c", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0489", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="091e", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="18d1", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0bb4", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="12d1", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="24e3", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="2116", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0482", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="17ef", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="1004", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="22b8", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0409", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="2080", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0955", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="2257", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="10a9", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="1d4d", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0471", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="04da", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="05c6", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="1f53", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="04e8", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="04dd", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0fce", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="0930", MODE="0666", GROUP="plugdev" SUBSYSTEM=="usb", ATTRS{idVendor}=="19d2", MODE="0666", GROUP="plugdev"Set up the right permissions for the file:
sudo chmod a+r /etc/udev/rules.d/51-android.rulesRestart the daemon
sudo udevadm control --reload-rules sudo service udev restart sudo udevadm trigger
If it still doesn't work, check this answer on StackOverflow.
Board doesn't start / is boot-looping / is bricked
If you can still connect to the board using the serial console and get to a prompt such as:
root@linaro-developer:~#
You can get into fastboot (bootloader) mode by entering:
reboot2fastboot
If the serial console is not possible, you can try to connect the Micro USB cable, and enter:
adb wait-for-device && adb reboot bootloader
Then power cycle the board. If you're lucky, adb manages to connect briefly and can send the board into fastboot.
To check if it's in fastboot mode, use:
fastboot devices
Once you managed to get into fastboot mode, you can try updating the Android/Linux image.
If you happen to have a P2 board, you should be able to reset the Snapdragon to the recovery image by starting up the Snapdragon while shorting the two pins next to where J3 is written (The two rectangular pins in-between the corner hole and the MicroSD card slot almost at the edge of the board.
If everything fails, you probably need to request help from intrinsyc.
No space left on device
Sometimes make atlflight_eagle_default upload fails to upload:
failed to copy 'px4' to '/home/linaro/px4': No space left on device
This can happen if ramdumps fill up the disk. To clean up, do:
rm -rf /var/log/ramdump/*
Also, the logs might have filled the space. To delete them, do:
rm -rf /root/log/*
Undefined PLT symbol
_FDtest
If you see the following output on mini-dm when trying to start the px4 program, it means that you need to update the ADSP firmware:
[08500/03] 05:10.960 HAP:45:undefined PLT symbol _FDtest (689) /libpx4muorb_skel.so 0303 symbol.c
Something Else
If you have changed the source, presumably added functions and you see undefined PLT symbol ... it means that the linking has failed.
- Do the declaration and definition of your function match one to one?
- Is your code actually getting compiled? Is the module listed in the cmake config
- Is the (added) file included in the
CMakeLists.txt? - Try adding it to the POSIX build and running the compilation. The POSIX linker will inform you about linking errors at compile/linking time.
krait update param XXX failed on startup
ERROR [platforms__posix__px4_layer] krait update param 297 failed
ERROR [platforms__posix__px4_layer] krait update param 646 failed
px4 starting.
ERROR [muorb] Initialize Error calling the uorb fastrpc initalize method..
ERROR [muorb] ERROR: FastRpcWrapper Not Initialized
If you get errors like the above when starting px4, try
- upgrading the Linux image
- and updating the ADSP firmware. Also try to do this from a native Linux installation instead of a virtual machine. There have been reports where it didn't seem to work when done in a virtual machine.
- then rebuild the px4 software, by first completely deleting your existing Firmware repo and then re-cloning it as described here
- and finally rebuild and re-run it
- make sure the executable bit of
/usr/local/qr-linux/q6-admin.shis set:adb shell chmod +x /usr/local/qr-linux/q6-admin.sh
ADSP restarts
If the mini-dm console suddenly shows a whole lot of INIT output, the ADSP side has crashed. The reasons for it are not obvious, e.g. it can be some segmentation fault, null pointer exception, etc.
The mini-dm console output typically looks like this:
[08500/02] 20:32.332 Process Sensor launched with ID=1 0130 main.c
[08500/02] 20:32.337 mmpm_register: MMPM client for USM ADSP core 12 0117 UltrasoundStreamMgr_Mmpm.cpp
[08500/02] 20:32.338 ADSP License DB: License validation function with id 164678 stored. 0280 adsp_license_db.cpp
[08500/02] 20:32.338 AvsCoreSvc: StartSvcHandler Enter 0518 AdspCoreSvc.cpp
[08500/02] 20:32.338 AdspCoreSvc: Started successfully 0534 AdspCoreSvc.cpp
[08500/02] 20:32.342 DSPS INIT 0191 sns_init_dsps.c
[08500/02] 20:32.342 INIT DONE 0224 sns_init_dsps.c
[08500/02] 20:32.342 Sensors Init : waiting(1) 0160 sns_init_dsps.c
[08500/02] 20:32.342 INIT DONE 0224 sns_init_dsps.c
[08500/02] 20:32.342 THRD CREATE: Thread=0x39 Name(Hex)= 53, 4e, 53, 5f, 53, 4d, 47, 52 0186 qurt_elite_thread.cpp
[08500/02] 20:32.343 THRD CREATE: Thread=0x38 Name(Hex)= 53, 4e, 53, 5f, 53, 41, 4d, 0 0186 qurt_elite_thread.cpp
[08500/02] 20:32.343 THRD CREATE: Thread=0x37 Name(Hex)= 53, 4e, 53, 5f, 53, 43, 4d, 0 0186 qurt_elite_thread.cpp
[08500/02] 20:32.343 THRD CREATE: Thread=0x35 Name(Hex)= 53, 4e, 53, 5f, 50, 4d, 0, 0 0186 qurt_elite_thread.cpp
[08500/02] 20:32.343 THRD CREATE: Thread=0x34 Name(Hex)= 53, 4e, 53, 5f, 53, 53, 4d, 0 0186 qurt_elite_thread.cpp
[08500/02] 20:32.343 THRD CREATE: Thread=0x33 Name(Hex)= 53, 4e, 53, 5f, 44, 45, 42, 55 0186 qurt_elite_thread.cpp
[08500/02] 20:32.343 Sensors Init : ///////////init once completed/////////// 0169 sns_init_dsps.c
[08500/02] 20:32.342 loading BLSP configuration 0189 blsp_config.c
[08500/02] 20:32.343 Sensors DIAG F3 Trace Buffer Initialized 0260 sns_init_dsps.c
[08500/02] 20:32.345 INIT DONE 0224 sns_init_dsps.c
[00053/03] 20:32.345 Unsupported algorithm service id 0 0953 sns_scm_ext.c
[08500/02] 20:32.346 INIT DONE 0224 sns_init_dsps.c
[08500/02] 20:32.347 INIT DONE 0224 sns_init_dsps.c
[08500/02] 20:32.347 INIT DONE 0224 sns_init_dsps.c
[08500/02] 20:32.546 HAP:159:unable to open the specified file path 0167 file.c
[08500/04] 20:32.546 failed to open /usr/share/data/adsp/blsp.config 0204 blsp_config.c
[08500/04] 20:32.546 QDSP6 Main.c: blsp_config_load() failed 0261 main.c
[08500/02] 20:32.546 Loaded default UART-BAM mapping 0035 blsp_config.c
[08500/02] 20:32.546 UART tty-1: BAM-9 0043 blsp_config.c
[08500/02] 20:32.546 UART tty-2: BAM-6 0043 blsp_config.c
[08500/02] 20:32.546 UART tty-3: BAM-8 0043 blsp_config.c
[08500/02] 20:32.546 UART tty-4: BAM-2 0043 blsp_config.c
[08500/02] 20:32.546 UART tty-5: BAM N/A 0048 blsp_config.c
[08500/02] 20:32.546 UART tty-6: BAM N/A 0048 blsp_config.c
[08500/02] 20:32.547 HAP:111:cannot find /oemconfig.so 0141 load.c
[08500/03] 20:32.547 HAP:4211::error: -1: 0 == dynconfig_init(&conf, "security") 0696 sigverify.c
[08500/02] 20:32.548 HAP:76:cannot find /voiceproc_tx.so 0141 load.c
[08500/02] 20:32.550 HAP:76:cannot find /voiceproc_rx.so 0141 load.c
Do I have a P1 or P2 Board?
The silkscreen on the Snapdragon reads something like:
1DN14-25-
H9550-P1
REV A
QUALCOMM
If you see H9550, it means you have a P2 board!
Please ignore that it says -P1.
Presumably P1 boards don't have a factory partition/image and therefore can't be restored to factory state.