# MindRacer 하드웨어
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](http://mindpx.net)에 문의하십시오.
AirMind® MindRacer (opens new window) 시리즈는 미니어처 UAV를위한 완전 스택형 비행 플랫폼입니다. 현재 플랫폼에는 MindRacer 210과 NanoMind 110의 2개의 RTF 기체가 있습니다.
Note
이 비행 컨트롤러는 제조업체의 지원을 받을 수 있습니다.
# 요약
MindRacer는 소형 UAV를 위한 비행 플랫폼입니다. MindPX를 기반의 MindRacer는 모듈화와 폼팩터 크기 축소에 중점을 두었습니다. MindRacer는 비행 컨트롤러가 아닌 플랫폼입니다.
MindRacer는 SEP(납땜 제거 포트) 및 WEP(배선 제거 프로토콜) 개념을 구현합니다. SEP 및 WEP 이전에는, 납땜과 배선은 UAV 제조와 튜닝 과정의 어려움과 비효율성을 야기하였습니다.
Note
주요 하드웨어 문서는 여기 (opens new window)를 참고하십시오.
- 초소형 크기: 무게 ~ 6g
- 고성능 STM32F427 168MHz 부동 소수점 프로세서, 초고속 스로틀 응답
- OneShot ESC 지원
- PPM/SBUS/DSM 라디오 수신기와 D.Port/S.Port/Wifi 원격 텔레메트리를 지원합니다.
- 온보드 비행 데이터 기록 장치
- IMU 격리 지원
- DroneCode® 표준 준수 커넥터
| 항목 | 설명 |
|---|---|
| 비행 컨트롤러/프로세서 | F427VIT6 |
| 중량 | 약 6g |
| 크기 | 35x35mm |
| PWM 출력 | 최대 6 |
| IMU | 10DOF |
| IMU 격리 | 예 / 선택 사항 |
| 라디오 수신기 | S.BUS/PPM/DSM/DSM2/DSMX/SUMD |
| 텔레메트리 | FrSky® D.Port, S.Port, Wifi, 3DR radio |
| 비행 데이터 기록 온보드 TF 카드 | 예 |
| OneShot ESC 지원 | 예 |
| 확장 슬롯 | 2x7(pin)x2 |
| 온보드 실시간 시계 | 예 |
| 커넥터 | JST GH(DroneCode 표준 준수) |
# 빠른 시작
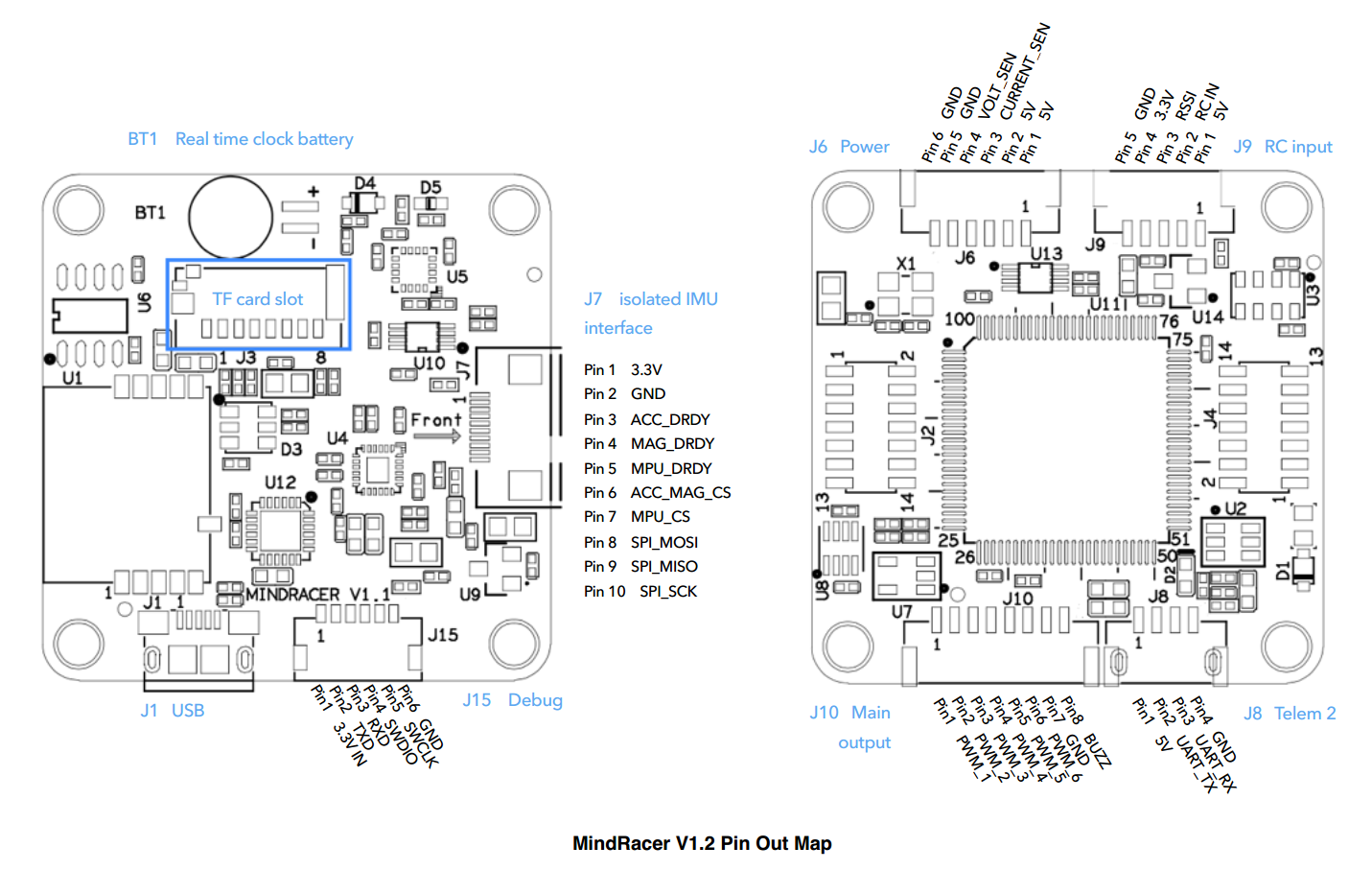
# 핀배열 지도
# 빌드 방법
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. 하드웨어가 연결되면 *QGroundControl*에 의해 사전 구축되고 자동으로 설치됩니다.
:::
이 대상에 대한 PX4 빌드 방법 :
make airmind_mindpx-v2_default
# 보조 컴퓨터 PC 연결
MindRacer에는 Adapt IO 보드가 부착되어 있습니다.

MindRacer에는 UART-USB 변환기가 내장되어 있습니다. 보조 컴퓨터를 연결하려면 인터페이스 보드에 MindRacer를 적재후, 보조 컴퓨터를 인터페이스 보드의 USB 포트에 연결합니다.
그리고, 최대 BAUD 속도는 px4 제품군과 동일하며 최대 921600입니다.
# 사용자 가이드
Note
사용자 가이드는 여기 (opens new window)를 참고하십시오
# 구매처
MindRacer는 인터넷 AirMind Store (opens new window)에 구매할 수 있습니다. Amazon® 또는 eBay®에서도 MindRacer를 구매할 수 있습니다.
# 지원
자세한 내용은 http://www.mindpx.org를 참고하십시오. 문의 사항이나 도움이 필요한 경우에는 support@mindpx.net에 이메일을 보내십시오.
← 에어마인드 MindPX CUAV X7 →