# Omnibus F4 SD
PX4에서는 이 제품을 제조하지 않습니다. 지원 또는 규정준수 문제는 제조업체에 문의하십시오.
Omnibus F4 SD는 레이서를 위해 설계된 컨트롤러입니다. 일반적인 레이서 보드와 달리 SD 카드와 고속 CPU 등이 추가되었습니다.

다음은 Pixracer와 주요 차이점은 다음과 같습니다.
- 저렴한 가격
- 더 적은 IO 포트(예 : GPS 또는 Flow 센서를 연결은 가능함)
- 외부 GPS용 I2C 버스에 외부 풀업 저항이 필요합니다. 아래 I2C를 참조하십시오.
- 적은 RAM (192 KB vs. 256 KB) and FLASH (1 MB vs. 2 MB)
- Pixracer와 동일 보드 크기, 약간 더 작은 폼 팩터(커넥터가 적기 때문에)
- 통합 OSD(아직 소프트웨어에서 구현되지 않음)
TIP
모든 일반적인 PX4 기능은 여전히 레이서에 사용할 수 있습니다!
Note
이 비행 컨트롤러는 제조업체의 지원을 받을 수 있습니다.
# 주요 기능
- 메인 시스템 온칩: STM32F405RGT6 (opens new window)
- CPU : 단정밀도 FPU의 168MHz ARM Cortex M4
- RAM : 192KB SRAM
- FLASH: 1 MB
- 표준 레이서 폼 팩터 : 36x36mm, 표준 30.5mm 구멍 패턴
- MPU6000 가속/자이로
- BMP280 기압계(모든 보드에 마운트된 것은 아님)
- microSD(로깅)
- Futaba S.BUS 및 S.BUS2/Spektrum DSM2 및 DSMX/Graupner SUMD/PPM 입력/Yuneec ST24
- OneShot PWM 출력(설정 가능)
- 내장 전류 센서
- 내장 OSD 칩(SPI를 통한 AB7456)
# 구매처
보드는 몇 가지 변형된 형태(예 : 기압계 포함 또는 제외)로 여러 공급 업체에서 생산합니다.
PX4는 Betaflight OMNIBUSF4SD 대상을 지원하는 보드와 호환됩니다(제품 페이지에 *OMNIBUSF4SD*가 있는 경우, 보드는 PX4에서 작동해야 함).
TIP
모든 Omnibus F4 레이블 파생물(예 : 클론)도 작동합니다. 그러나, 이러한 보드의 배전은 품질이 다양합니다.
아래의 보드들은 테스트되고 작동하는 것입니다.
Hobbywing XRotor 비행 콘트롤러 F4 (opens new window) :::note 이 보드는 납땜이 필요없는 Hobbywing XRotor Micro 40A 4in1 ESC (opens new window)에 적합합니다. 이 ESC 보드는 또한 Omnibus 보드에 전원을 제공합니다. :::
구매처:
오리지널 Airbot Omnibus F4 SD
구매처:
액세서리에는 아래의 내용물이 포함됩니다.
- MAVLink 텔레메트리 ESP8266 WiFi 모듈. 다음 핀을 연결하여야합니다: GND, RX, TX, VCC 및 CH-PD (CH-PD ~ 3.3V). 전송 속도는 921600입니다.
# 커넥터
이 설계를 기반으로 한 다른 공급 업체의 보드는 레이아웃이 상당히 다를 수 있습니다. 다양한 버전의 레이아웃/실크스크린이 아래와 같습니다.
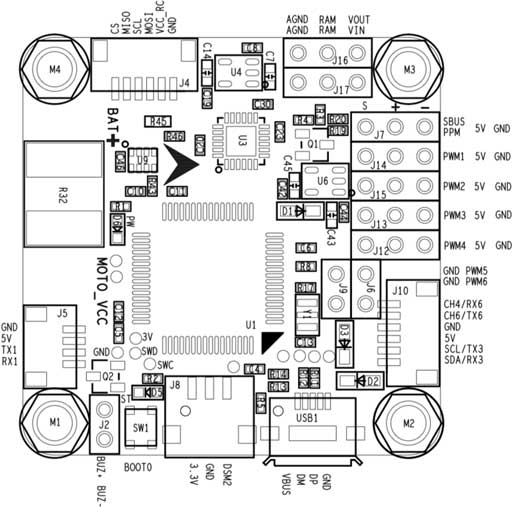
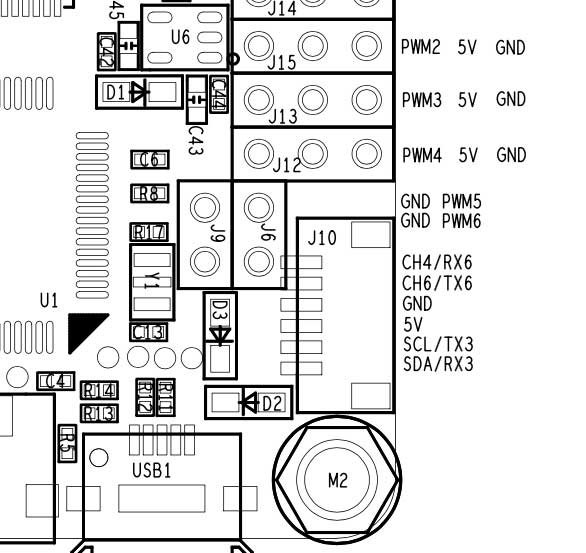
# 에어 봇 옴니버스 F4 SD
아래는 상단과 하단을 모두 보여주는 Airbot Omnibus F4 SD (V1)의 실크 스크린입니다.
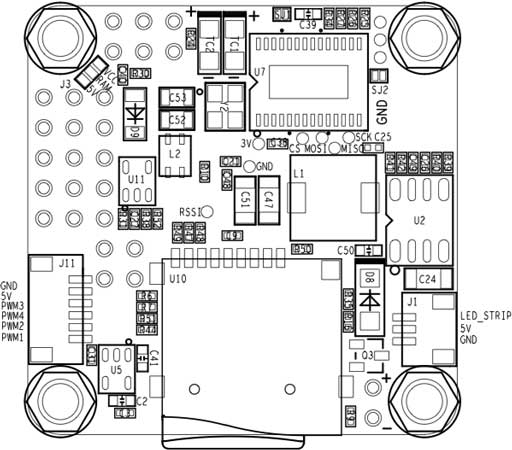
# Hobbywing XRotor 비행 콘트롤러 F4
아래는 Hobbywing XRotor 비행 콘트롤러 F4의 실크스크린입니다.
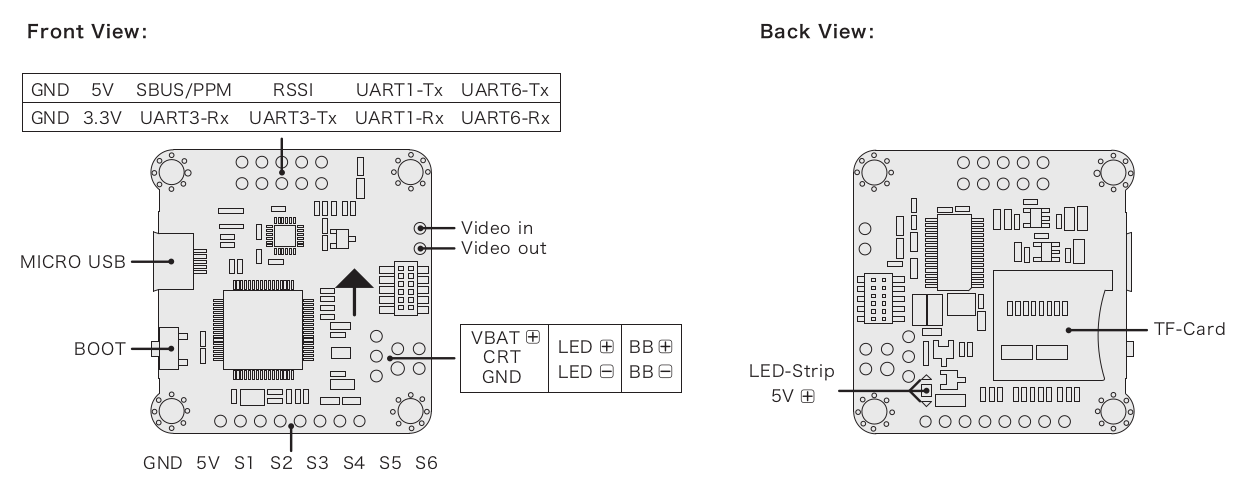
# 핀배열
# 무선 조종
RC는 다음 포트중 하나에 연결됩니다.
- UART1
- SBUS/PPM 포트(인버터를 통해 내부적으로 UART1로 이동)
Note
일부 Omnibus F4 보드에는 MCU SBUS 및 PPM 중 하나 또는 둘 다를 단일 핀 헤더에 연결하는 점퍼가 있습니다. 사용하기 전에 점퍼 또는 솔더 브리지를 적절한 MCU 핀으로 설정하십시오.
# UART
UART6: GPS 포트
TX: MCU 핀 PC6
RX: MCU 핀 PC7
Airbot Omnibus F4 SD 핀아웃은 포트 J10(TX6 / RX6)에 있습니다.
UART4
- TX: MCU 핀 PA0
- RX: MCU 핀 PA1
- 초당 전송속도: 57600
- 이것은
TELEM 2포트로 설정할 수 있습니다. - 에어 봇 옴니버스 F4 SD 핀배열:
- TX: RSSI 핀
- RX: PWM 출력 5
# I2C
다음을 통해 사용 가능한 I2C 포트가 하나 있습니다.
- SCL: MCU 핀 PB10 (TX3로 표시 될 수 있음)
- SDA: MCU 핀 PB11 (RX3로 표시 될 수 있음)
Note
두 신호(클럭 및 데이터) 모두에 외부 풀업이 필요합니다. 예를 들어, 2.2k 풀업을 사용하여 외부 매거진을 연결할 수 있습니다.
- Airbot Omnibus F4 SD 핀아웃은 포트 J10 (SCL [클럭] / SCA [데이터])에 있습니다.
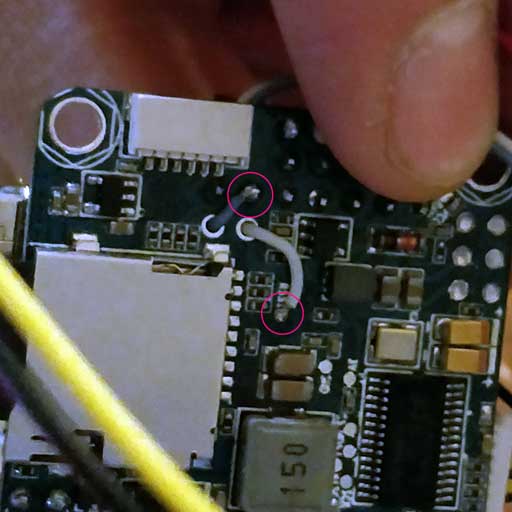
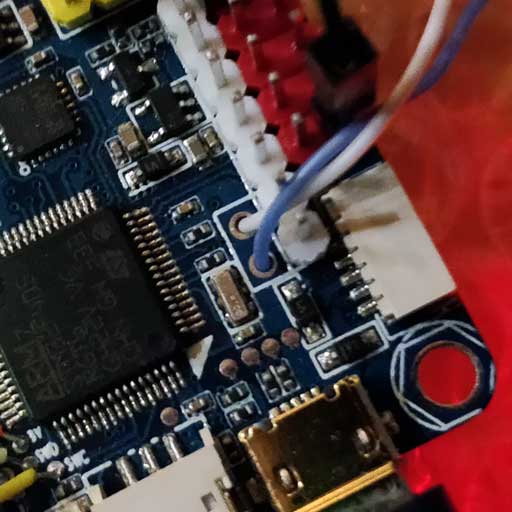
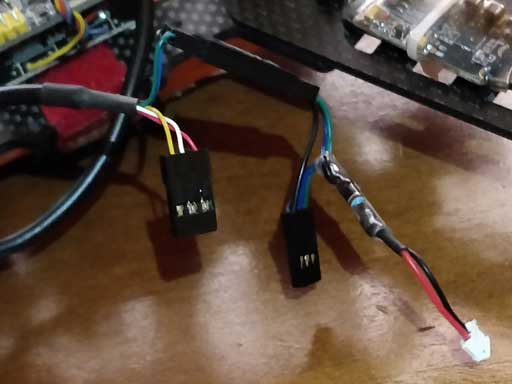
다음은 구현의 예입니다. 저는 Spektrum 플러그를 사용하여 DSM 포트에서 3.3v를 얻었으며 2.2k 저항을 통해 각 라인에 3.3v+ 만 연결하였습니다.

# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | SerialRX |
| USART4 | /dev/ttyS1 | TELEM1 |
| USART6 | /dev/ttyS2 | GPS |
# RC 텔레메트리
Omnibus는 FrSky 텔레메트리 또는 CRSF Crossfire 텔레메트리를 사용하여 RC 전송기에 대한 원격측정을 지원합니다.
# CRSF Crossfire 텔레메트리
TBS CRSF Crossfire 텔레메트리는 비행 콘트롤러(기체의 자세, 배터리, 비행 모드 및 GPS 데이터)에서 RC 송신기(Taranis)로 원격측정 데이터를 전송합니다.
FrSky 텔레메트리의 이점은 다음과 같습니다.
- RC와 텔레메트리에는 단일 UART 만 필요합니다.
- CRSF 프로토콜은 응답시간 느린 장치에 최적화되어 있습니다.
- 150Hz RC 업데이트 속도.
- 신호는 반전되지 않으므로 외부 인버터 로직이 필요하지 않습니다.
Omnibus는 소형 쿼드 용으로 특별히 설계되었으므로 TBS Crossfire Nano RX (opens new window) 사용을 권장합니다.
휴대용 컨트롤러(예 : Taranis)에서는 송신기 모듈 (opens new window)도 필요합니다. 이것은 RC 콘트롤러의 뒷면에 장착할 수 있습니다.
Note
위의 참조 링크에는 TX/RX 모듈 문서가 포함되어 있습니다.
# 설정
다음과 같이 Nano RX와 Omnibus 핀을 연결합니다.
| Omnibus UART1 | Nano RX |
|---|---|
| TX | Ch2 |
| RX | Ch1 |
PX4 비행 컨트롤러에서 다른 항목을 설정하지 않아도 됩니다. RC 프로토콜이 자동으로 감지됩니다.
다음으로 TX/RX 모듈을 업데이트하여 CRSF 프로토콜을 사용하고 텔레메트리를 설정합니다. 이에 대한 지침은 TBS Crossfire 매뉴얼 (opens new window)( 'CRSF용 라디오 설정' 검색)에 나와 있습니다.
# 회로도
회로도는 Airbot (opens new window)에서 제공합니다: OmnibusF4-Pro-Sch.pdf (opens new window).
# 부트로더 업데이트
보드에는 Betaflight (opens new window)가 사전 설치되어 있습니다. PX4 펌웨어를 설치하기 전에 PX4 부트 로더를 플래시하여야 합니다. omnibusf4sd_bl.hex (opens new window) 부트로더 바이너리를 다운로드하고 이 페이지에서 플래시 방법을 참고하십시오.
# 펌웨어 빌드
이 대상에 대한 PX4 빌드 방법 :
make omnibus_f4sd_default
# 펌웨어 설치
펌웨어는 일반적인 방법으로 설치할 수 있습니다.
- 소스 빌드 및 업로드
make omnibus_f4sd_default upload - QGroundControl을 사용하여 펌웨어를 로드합니다. 미리 빌드된 펌웨어나 사용자 지정 펌웨어를 사용할 수 있습니다.
# 설정
기본 설정 외에도 아래의 매개변수가 중요합니다.
| 매개변수 | 설정 |
|---|---|
| SYS_HAS_MAG | 보드에 내부 자력계가 없기 때문에 비활성화하여야 합니다. 외부 자력계를 연결하여 활성화 할 수 있습니다. |
| SYS_HAS_BARO | 보드에 기압계가 없는 경우에는 비활성화 하십시오. |
| MOT_ORDERING | Betaflight/Cleanflight 모터 할당과 함께 4-in-1 ESC를 사용하는 경우 이 매개변수를 적절하게 설정할 수 있습니다. |
# 추가 정보
이 보드에 관한 리뷰는 여기 (opens new window)를 참고하십시오.
이 페이지 (opens new window)는 핀배열, 설정 방법을 제공합니다.