# DroPix 비행 컨트롤러
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://store.drotek.com/)에 문의하십시오.
:::
Drotek® DroPix 자동조종장치는 Pixhawk®-프로젝트 (opens new window) FMUv2 개방형 하드웨어 디자인을 기반으로합니다. PX4를 NuttX (opens new window) OS에서 실행합니다.
DroPix 시스템에는 통합 멀티 스레딩, Unix/Linux와 유사한 프로그래밍 환경, 임무 및 비행 동작의 Lua 스크립팅과 같은 완전히 새로운 자동 조종 기능, 모든 프로세스에 걸쳐 타이트한 타이밍을 보장하는 맞춤형 PX4 드라이버 레이어가 포함됩니다.
Note
이 비행 컨트롤러는 제조업체의 지원을 받을 수 있습니다. :::
# 주요 특징
- NuttX RTOS 실행 고급 32 비트 ARM Cortex® M4 프로세서
- 14 개 PWM/서보 출력(페일세이프 및 수동 오버라이드 포함 8 개, 보조, 고전력 호환 5 개)
- 추가 주변 장치(UART, I2C, CAN) 다양한 연결 옵션
- 전용 프로세서 및 독립형 전원 공급 장치로 비행중 복구 및 수동 오버라이드 통합 백업 시스템
- 백업 시스템은 믹싱을 통합하여 일관된 자동조종장치와 수동 오버라이드 믹싱 모드를 제공합니다.
- 중복 전원공급장치 및 자동 장애 조치
- 모터 간편 활성화를 위한 외부 안전 버튼
- 다색 LED 표시기
- 고전력 멀티톤 피에조 오디오 표시기
- 장기간 고속 로깅을 위한 microSD 카드
- 센서
- ST Micro L3GD20 3축 16비트 자이로스코프
- ST Micro LSM303D 3축 14비트 가속도계/자력계
- Invensense® MPU 6000 3축 가속도계/자이로스코프
- MEAS MS5611 기압계
- 표준 MK 스타일 장착 구멍 45mm x 45mm (M3 구멍)
- 크기
- 크기: 6750 6mm
- 중량: 15g (커넥터 제외)
# 구매처
DroPix Autopilots & Accessories (opens new window)
# 문서
DroPix 사용 설명서 (opens new window)
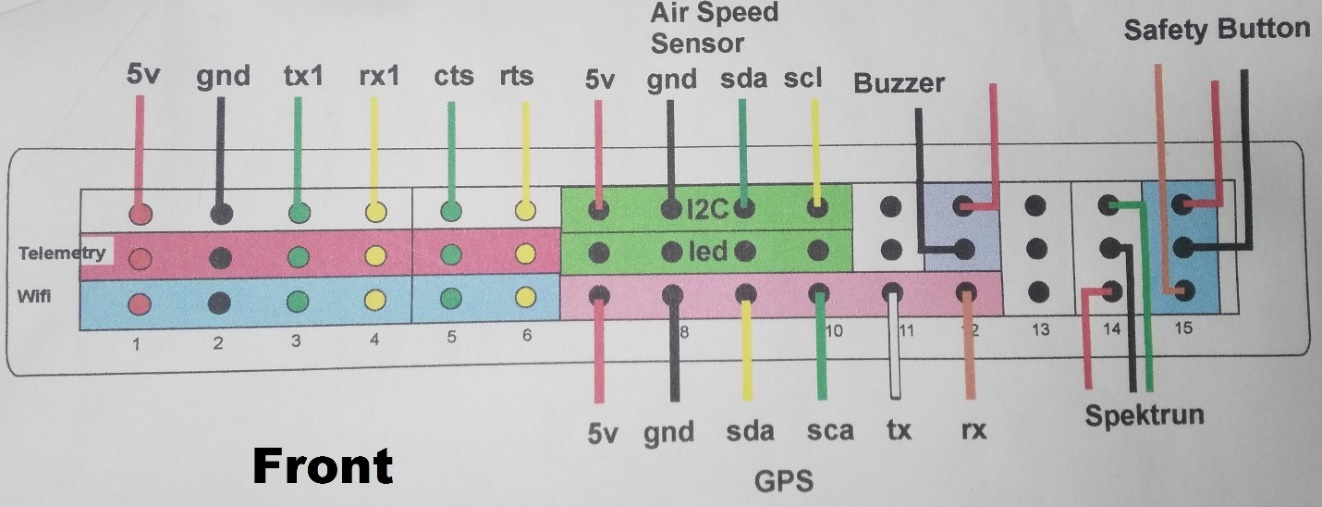
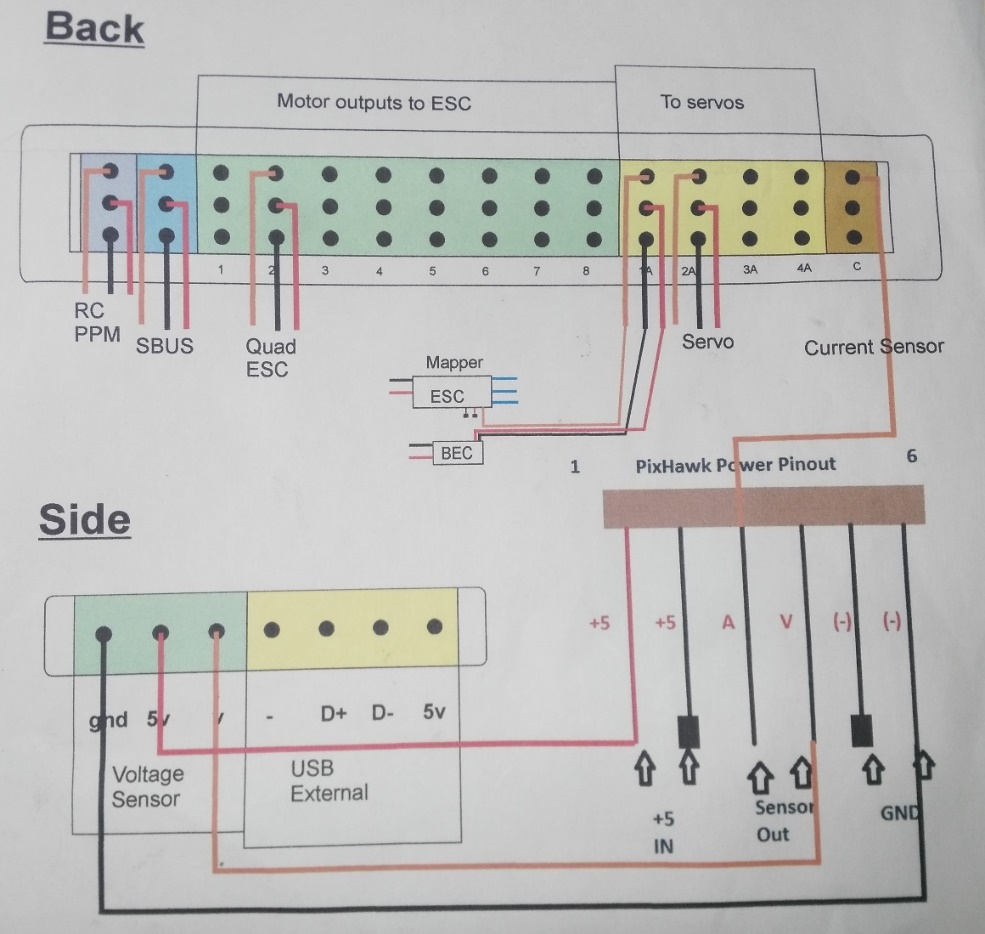
# 배선 가이드
아래의 다이어그램은 Dropix 커넥터 정보를 보여줍니다(자세한 내용은 drotek 문서 (opens new window) 참조).
# 펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. It is pre-built and automatically installed by *QGroundControl* when appropriate hardware is connected. :::
이 대상에 대한 PX4 빌드 방법 :
make px4_fmu-v2_default
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | IO 디버그 |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | ||
| UART7 | 콘솔 | |
| UART8 | SERIAL4 |