# CUAV V5+ 자동조종장치
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://store.cuav.net/)에 문의하십시오.
V5+®는 CUAV®에서 제조한 고급 자동조종장치입니다. CUAV®와 PX4팀이 공동으로 설계하였습니다.
자동조종장치는 상용시스템 통합에 권장되지만, 학술 연구와 기타 용도에도 적합합니다.

주요 기능은 다음과 같습니다.
- Pixhawk 프로젝트 (opens new window) FMUv5 설계 표준과 호환되며, 외부 인터페이스에 Pixhawk 커넥터 표준 (opens new window)을 적용합니다.
- 더 안정적이고 신뢰할 수 있는 센서와 함께 FMU v3보다 고급 프로세서, RAM 및 플래시 메모리.
- PX4와 펌웨어 호환.
- 모듈식 설계를 통해 사용자는 자신의 캐리어 보드를 설정할 수 있습니다.
- 고성능 충격흡수 시스템을 갖춘 내장형 진동감쇠 시스템.
- 비행 안전 향상을 위한 다중 센서와 전원 시스템.
Note
이 비행 컨트롤러는 제조업체의 지원을 받을 수 있습니다.
# 요약
메인 FMU 프로세서: STM32F765
- 32 비트 Arm® Cortex®-M7, 216MHz, 2MB 메모리, 512KB RAM
IO 프로세서: STM32F100
- 32 비트 Arm® Cortex®-M3, 24MHz, 8KB SRAM
내장 센서 :
- 가속도계/자이로스코프 : ICM-20689
- 가속도계/자이로스코프 : BMI055
- 자력계 : IST8310
- 기압계: MS5611
인터페이스:
- PWM 출력 8-14개(IO 6개, FMU 8개)
- FMU의 전용 PWM/캡처 입력 3 개
- CPPM 전용 RC 입력
- 아날로그/PWM RSSI 입력이있는 Spektrum/DSM 및 S.Bus 전용 RC 입력
- 아날로그/PWM RSSI 입력
- PWM Servo 출력
- 범용 시리얼 포트 5개
- I2C 포트 4개
- SPI 버스 4개
- 직렬 ESC가 있는 CANBuse 2 개
- 배터리 2 개의 전압 및 전류에 대한 아날로그 입력
전원 시스템 :
- 전원: 4.3~5.4V
- USB 입력: 4.75~5.25V
중량과 크기
- 중량: 90g
- 크기: 85.54233mm
기타 특성:
- 작동 온도: -20 ~ 80°c (측정치)
# 구매처CUAV 알리익스프레스 (opens new window)(국제 사용자)
CUAV Taobao (opens new window) (중국 본토 사용자)
Note
Neo GPS 모듈과 함께 자동조종장치를 구매할 수 있습니다.
# 배선
# 핀배열
여기 (opens new window)에서 V5+ 핀배열을 다운로드하세요.
# 정격 전압
V5 + AutoPilot은 중복 전원공급장치를 지원합니다. 최대 3개의 전원를 사용할 수 있습니다 : Power1, Power2 및 USB. 이러한 소스중 하나 이상에 전원을 공급하여야합니다. 그렇지 않으면, 비행 컨트롤러에 전원이 공급되지 않습니다.
PX4IO 모듈이 있는 FMUv5 기반 FMU(*V5+*의 경우)에서 서보파워레일은 FMU에 의해서만 모니터링됩니다. FMU에 의해 전원에 의해 공급받지도 않고, 공급되지도 않습니다. FMU에 의해 전원에 의해 공급받지도 않고, 공급되지도 않습니다.
정상 작동 최대 정격 전압
이러한 조건에서 전원은 아래의 순서대로 시스템에 전원을 공급하여야합니다.
Power1및Power2입력(4.3V ~ 5.4V)USB입력(4.75V ~ 5.25V)
# 과전류 보호
*V5+*은 5V 주변장치와 5V 이상의 고전력에 과전류 보호기능으로 전류를 2.5A로 제한합니다. *V5+*에는 단락보호 기능이 있습니다.
WARNING
핀 1로 나열된 커넥터에 최대 2.5A를 전달할 수 있습니다(단, 정격은 1A에 불과함).
# 펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. 하드웨어가 연결되면 *QGroundControl*에 의해 사전 구축되고 자동으로 설치됩니다.
:::
이 대상에 대한 PX4 빌드 방법 :
make px4_fmu-v5_default
# 디버그 포트
PX4 시스템 콘솔과 SWD 인터페이스는 FMU 디버그 포트에서 실행됩니다. 보드에는 I/O 디버그 인터페이스가 없습니다.
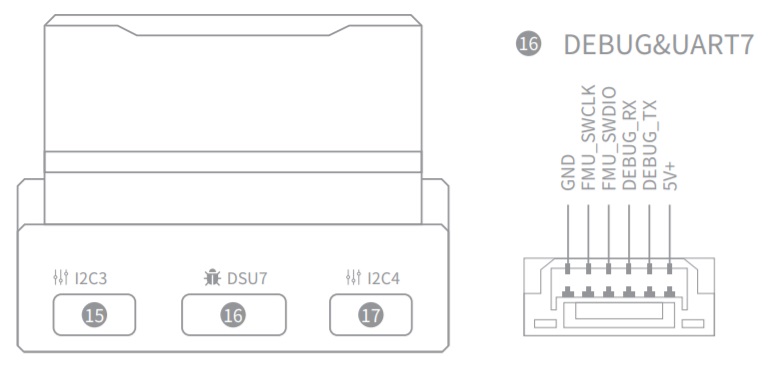
디버그 포트(DSU7)는 JST BM06B (opens new window) 커넥터를 사용하며 다음과 같은 핀배열을 가집니다.
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | 5V+ | +5V |
| 2 (흑) | DEBUG TX(출력) | +3.3V |
| 3 (흑) | DEBUG TX(입력) | +3.3V |
| 4 (흑) | FMU_SWDIO | +3.3V |
| 5 (흑) | FMU_SWCLK | +3.3V |
| 6 (흑) | GND | GND |
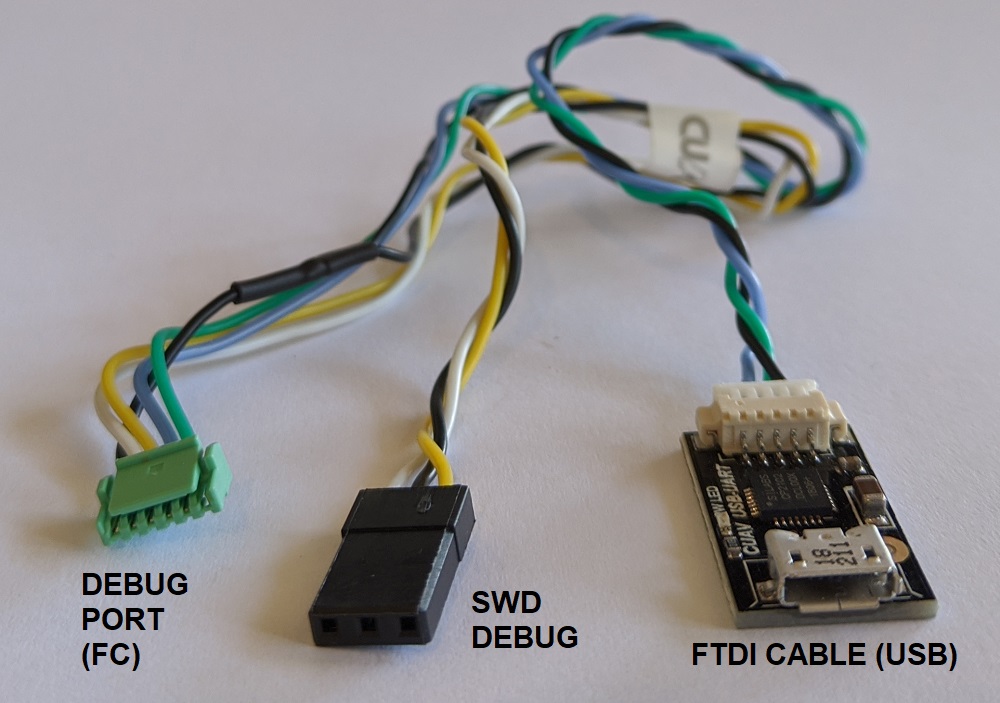
제품 패키지에는 DSU7 포트에 연결할 수 있는 편리한 디버그 케이블이 포함되어 있습니다. 이렇게 하면, PX4 시스템 콘솔을 컴퓨터 USB 포트에 연결하기 위한 FTDI 케이블과 SWD/JTAG 디버깅에 사용되는 SWD 핀이 분리됩니다. 제공된 디버그 케이블이 SWD 포트 Vref 핀 (1)에 연결되지 않습니다.
SWD
Vref 핀 (1)은 Vref로 5V를 사용하지만, CPU는 3.3V에서 실행됩니다!
일부 JTAG 어댑터 (SEGGER J-Link)는 Vref 전압을 사용하여 SWD 라인의 전압을 설정합니다. Segger Jlink에 직접 연결하려면 JTAG에 Vtref를 제공(즉, 3.3V 및 * NOT </> 5V 제공)하는 DSM/SBUS/RSSI로 표시된 커넥터의 핀 4에서 3.3 볼트를 사용하는 것이 좋습니다.
더 자세한 내용은 하드웨어 디버깅에 JTAG 사용을 참조하십시오.
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX는 SBUS_RC 커넥터의 RC 입력입니다. |
| UART7 | /dev/ttyS5 | 디버깅 콘솔 |
| UART8 | /dev/ttyS6 | PX4IO |
# 주변 장치
# 지원 플랫폼 및 기체
일반 RC 서보 또는 Futaba S-Bus 서보로 제어 가능한 모든 멀티콥터/비행기/로버 또는 보트. 지원되는 운송체의 설정은 기체 정의서를 참고하십시오.
# 참고
# 다른 유형의 전원모듈용 커넥터에 디지털 또는 아날로그 전원모듈을 연결하지 마십시오.
아날로그 전원모듈을 디지털 전원모듈 커넥터에 연결하면 해당 버스의 모든 I2C 장치가 중지됩니다. 특히, 경합으로 인하여 GPS의 나침반이 중지되고, 장기적으로 FMU가 손상 될 수도 있습니다.
마찬가지로, 아날로그 커넥터에 연결된 디지털 전원모듈은 작동하지 않으며, 장기적으로 전원 모듈이 손상될 수 있습니다.
# 호환성
CUAV는 몇 가지 차별화된 디자인을 채택하고, 아래에서 설명하는 일부 하드웨어와 호환되지 않습니다.
# 다른 장치와 호환되지 않는 GPS
*CUAV V5+*와 CUAV V5 nano와 함께 사용하도록 권장되는 Neo v2.0 GPS는 다른 Pixhawk 비행 컨트롤러(특히, 부저 부분이 호환되지 않으며 안전 스위치에 문제가 있을 수 있습니다.)
UAVCAN NEO V2 PRO GNSS 수신기 (opens new window)도 사용할 수 있으며, 다른 비행 컨트롤러와 호환됩니다.
# 하드웨어 디버깅에 JTAG 사용
DSU7 FMU 디버그 핀 1은 CPU의 3.3V가 아닌 5V입니다.
일부 JTAG는이 전압을 사용하여 타겟과 통신시 IO 레벨을 설정합니다.
Segger Jlink에 직접 연결하려면 디버그 커넥터(Vtref)의 핀 1로 3.3 볼트의 DSM/SBUS/RSSI 핀 4를 사용하는 것이 좋습니다.
# 알려진 문제
아래 문제는 처음 나타나는 배치번호를 나타냅니다. 배치번호는 V01 뒤의 4 자리 생산날짜이며 비행 컨트롤러 측면의 스티커에 표시되어 있습니다. 예를 들어, 일련 번호 Batch V011904((V01은 V5의 번호, 1904는 생산날짜, 즉 배치번호)입니다.
# SBUS / DSM / RSSI 인터페이스 Pin1 언퓨즈
WARNING
이것은 안전에 관련된 문제입니다.
SBUS/DSM/RSSI 인터페이스에 다른 장비(RC 수신기 제외)를 연결하지 마십시오. 장비가 손상될 수 있습니다.
- 발견됨: Batches V01190904xxxx
- 수정됨: Batches later than V01190904xxxx