# CUAV V5 nano 자동조종장치
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://store.cuav.net/)에 문의하십시오.
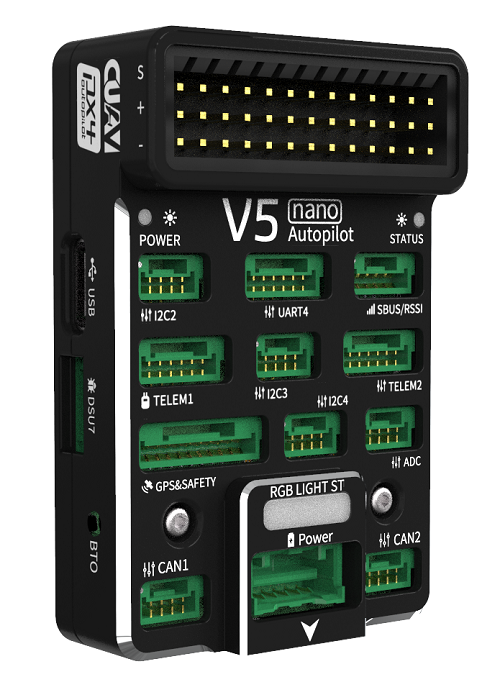
V5 nano®는 CUAV®와 PX4팀이 공동으로 설계한 공간 제약 애플리케이션용 자동조종장치입니다.
이 자동조종장치는 220mm 레이싱 드론에서 사용할 수 정도로 소형이지만, 대부분의 드론에도 충분히 사용할 수 있습니다.
주요 기능은 다음과 같습니다.
- Pixhawk 프로젝트 (opens new window) FMUv5 설계 표준과 호환되며, 외부 인터페이스에 Pixhawk 커넥터 표준 (opens new window)을 적용합니다.
- 더 안정적이고 신뢰할 수 있는 센서와 함께 FMU v3보다 고급 프로세서, RAM 및 플래시 메모리.
- PX4와 펌웨어 호환.
- I/O 핀을 위한 넉넉한 2.6mm 간격으로 모든 인터페이스를 더 쉽게 사용할 수 있습니다.
Note
이 비행 컨트롤러는 제조업체의 지원을 받을 수 있습니다.
# 요약
메인 FMU 프로세서: STM32F765◦32 비트 Arm® Cortex®-M7, 216MHz, 2MB 메모리, 512KB RAM
내장 센서 :
- 가속도/자이로: ICM-20689
- 가속도/자이로: ICM-20602
- 가속/자이로: BMI055
- 자력계 : IST8310
- 기압계: MS5611
인터페이스 : 8개의 PWM 출력
- FMU의 전용 PWM/캡처 입력 3 개
- CPPM 전용 RC 입력
- Spektrum/DSM 및 S.Bus 전용 R/C 입력
- 아날로그/PWM RSSI 입력
- 범용 시리얼 포트 4개
- I2C 포트 3개
- SPI 버스 4개
- 2개의 CAN 버스
- 배터리 전압/전류에 대한 아날로그 입력
- 2개의 추가 아날로그 입력
- nARMED 지원
전원 시스템: 파워 브릭 입력: 4.75 ~ 5.5V
USB 전원 입력: 4.75~5.25V
중량과 크기
- 크기: 604014mm
기타 특성:
- 작동 온도: -20 ~ 85°c (측정치)
# 구매처CUAV 알리익스프레스 (opens new window)(국제 사용자)
CUAV Taobao (opens new window) (중국 본토 사용자)
Note
Neo GPS 모듈과 함께 자동조종장치를 구매할 수 있습니다.
# 배선
# 핀배열
여기 (opens new window)에서 V5 nano 핀아웃을 다운로드하세요.
# 펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. 하드웨어가 연결되면 *QGroundControl*에 의해 사전 구축되고 자동으로 설치됩니다.
:::
이 대상에 대한 PX4 빌드 방법 :
make px4_fmu-v5_default
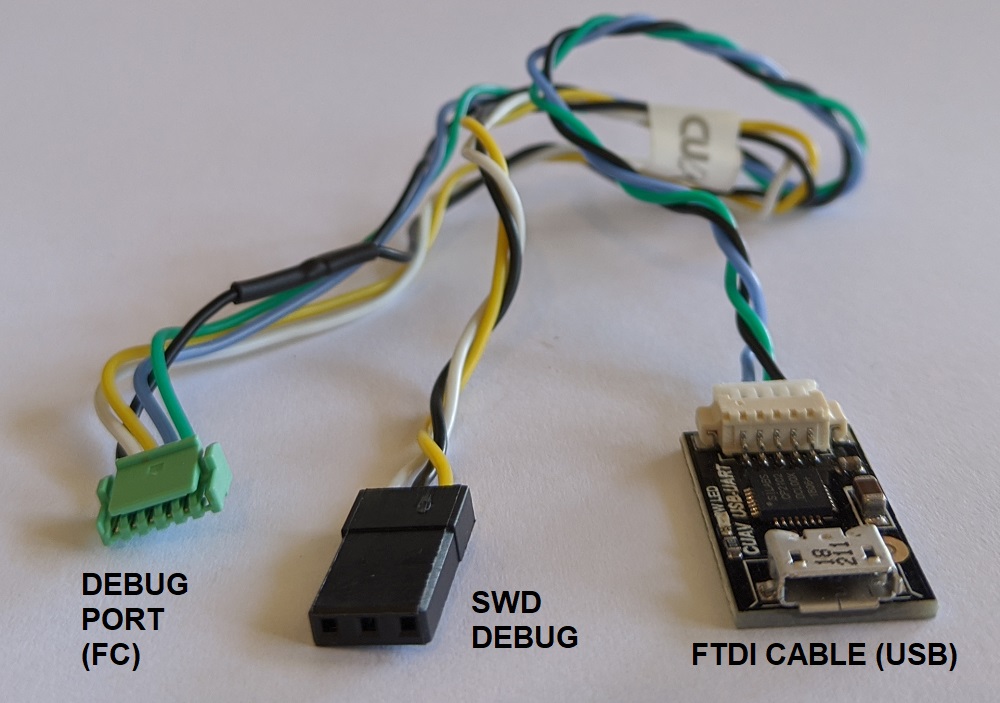
# 디버그 포트
PX4 시스템 콘솔과 SWD 인터페이스는 FMU 디버그 포트에서 실행됩니다. 보드에는 I/O 디버그 인터페이스가 없습니다.

디버그 포트(DSU7)는 JST BM06B (opens new window) 커넥터를 사용하며 다음과 같은 핀배열을 가집니다.
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | 5V+ | +5V |
| 2 (흑) | DEBUG TX(출력) | +3.3V |
| 3 (흑) | DEBUG TX(입력) | +3.3V |
| 4 (흑) | FMU_SWDIO | +3.3V |
| 5 (흑) | FMU_SWCLK | +3.3V |
| 6 (흑) | GND | GND |
제품 패키지에는 DSU7 포트에 연결할 수 있는 편리한 디버그 케이블이 포함되어 있습니다. 이렇게 하면, PX4 시스템 콘솔을 컴퓨터 USB 포트에 연결하기 위한 FTDI 케이블과 SWD/JTAG 디버깅에 사용되는 SWD 핀이 분리됩니다. 제공된 디버그 케이블이 SWD 포트 Vref 핀 (1)에 연결되지 않습니다.
SWD
Vref 핀 (1)은 Vref로 5V를 사용하지만, CPU는 3.3V에서 실행됩니다!
일부 JTAG 어댑터(SEGGER J-Link)는 Vref 전압을 사용하여 SWD 라인의 전압을 설정합니다. Segger Jlink에 직접 연결하려면 JTAG에 Vtref를 제공(즉, 3.3V 및 * NOT </> 5V 제공)하는 DSM/SBUS/RSSI로 표시된 커넥터의 핀 4에서 3.3 볼트를 사용하는 것이 좋습니다.
더 자세한 내용은 하드웨어 디버깅에 JTAG 사용을 참고하십시오.
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX는 SBUS_RC 커넥터의 RC 입력입니다. |
| UART7 | /dev/ttyS5 | 디버깅 콘솔 |
| UART8 | /dev/ttyS6 | 연결되지 않음 (PX4IO 없음) |
# 정격 전압
V5 nano는 비행 중 전원 커넥터에서 전원을 공급 받아야하며, 벤치 테스트를 위해 USB에서 전원을 공급받을 수도 있습니다.
Note
PM2 커넥터는 V5 nano에 전원을 공급하는 데 사용할 수 없습니다(해당 이슈 참조).
Note
서보파워레일은 FMU에 의해 전원이 공급되지 않으며, 전원을 제공하지도 않습니다. 그러나, **+**로 표시된 핀은 모두 공통이며, BEC는 서보전원레일에 전원을 공급하기 위하여 모든 서보 핀 세트에 연결될 수 있습니다.
# 과전류 보호
V5 nano에는 단락보호 기능이 있습니다.
# 주변 장치
# 지원 플랫폼 및 기체
일반 RC 서보 또는 Futaba S-Bus 서보로 제어 가능한 모든 멀티콥터/비행기/로버 또는 보트. 지원되는 운송체의 설정은 기체 정의서를 참고하십시오.
# 호환성
CUAV는 몇 가지 차별화된 디자인을 채택하고, 아래에서 설명하는 일부 하드웨어와 호환되지 않습니다.
# Neo v2.0 GPS는 다른 장치와 호환되지 않습니다.
*CUAV V5+*와 CUAV V5 nano와 함께 사용하도록 권장되는 Neo v2.0 GPS는 다른 Pixhawk 비행 컨트롤러(특히, 부저 부분이 호환되지 않으며 안전 스위치에 문제가 있을 수 있습니다.)
UAVCAN NEO V2 PRO GNSS 수신기 (opens new window)도 사용할 수 있으며, 다른 비행 컨트롤러와 호환됩니다.
# 하드웨어 디버깅에 JTAG 사용
DSU7 FMU 디버그 핀 1은 CPU의 3.3V가 아닌 5V입니다.
일부 JTAG 프로보는이 전압을 사용하여 타겟과 통신시 IO 레벨을 설정합니다.
Segger Jlink에 직접 연결하려면 디버그 커넥터(Vtref)의 핀 1로 3.3 볼트의 DSM/SBUS/RSSI 핀 4를 사용하는 것이 좋습니다.
# PM2는 비행 컨트롤러에 전원을 공급할 수 없습니다.
PM2는 배터리 전압과 전류만 측정 할 수 있고, 비행 컨트롤러에 전원을 공급할 수 없습니다.
WARNING
PX4는이 인터페이스를 지원하지 않습니다.
# 알려진 문제
아래 문제는 처음 나타나는 배치번호를 나타냅니다. 배치번호는 V01 뒤의 4 자리 생산날짜이며 비행 컨트롤러 측면의 스티커에 표시되어 있습니다. 예를 들어, 일련 번호 Batch V011904((V01은 V5의 번호, 1904는 생산날짜, 즉 배치번호)입니다.
# SBUS/DSM/RSSI 인터페이스 Pin1 언퓨즈
WARNING
이것은 안전에 관련된 문제입니다.
SBUS/DSM/RSSI 인터페이스에 다른 장비(RC 수신기 제외)를 연결하지 마십시오. 장비가 손상될 수 있습니다!
- 발견됨: Batches V01190904xxxx
- 수정됨: Batches later than V01190904xxxx