# ModalAI 플라이트 코어 v1
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://forum.modalai.com/)에 문의하십시오.
ModalAI Flight Core v1 (opens new window) (데이터시트 (opens new window))은 미국에서 제작된 PX4 용 비행 콘트롤러입니다. Flight Core는 장애물 회피와 GPS 거부 내비게이션을 위해 ModalAI VOXL (opens new window)(데이터시트 (opens new window))과 페어링하거나 독립형 비행 콘트롤러로 독립적으로 사용할 수 있습니다.

Flight Core는 VOXL Companion Computer와 Flight Core를 단일 PCB에 통합하는 VOXL Flight (opens new window) (데이터시트 (opens new window))의 PX4 비행 콘트롤러 부분과 동일합니다.
Note
이 비행 컨트롤러는 제조업체의 지원을 받을 수 있습니다.
# 사양
| 기능 | 세부 정보 |
|---|---|
| 중량 | 6 g |
| MCU | 216MHz, 32 비트 ARM M7 STM32F765II (opens new window) |
| 메모리 | 256Kb FRAM |
| 2Mbit Flash | |
| 512Kbit SRAM | |
| 펌웨어 | PX4 (opens new window) |
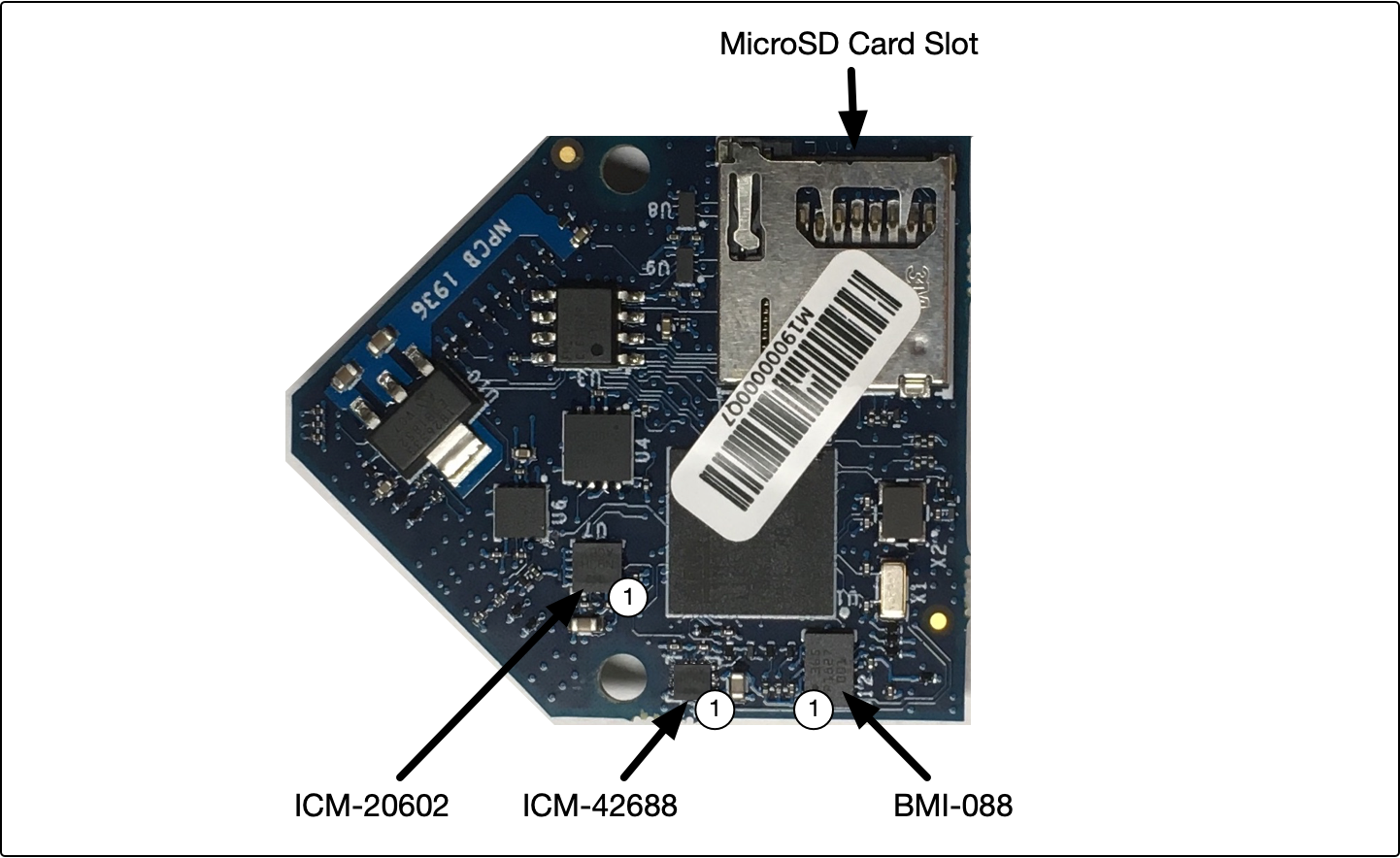
| 관성계 | ICM-20602 (opens new window) (SPI1) |
| ICM-42688 (SPI2) | |
| BMI088 (opens new window) (SPI6) | |
| 기압계 | BMP388 (opens new window) (I2C4) |
| 보안 요소 | A71CH (opens new window) (I2C4) |
| microSD 카드 | 지원되는 카드 정보 |
| 입력 | GPS/자력계 |
| Spektrum | |
| 텔레메트리 | |
| CAN 버스 | |
| PPM | |
| 출력 | LED 6 개 (2xRGB) |
| PWM 채널 8개 | |
| 추가 인터페이스 | 시리얼포트 3개 |
| I2C | |
| GPIO |
Note
자세한 하드웨어 문서는 여기 (opens new window)를 참고하십시오.
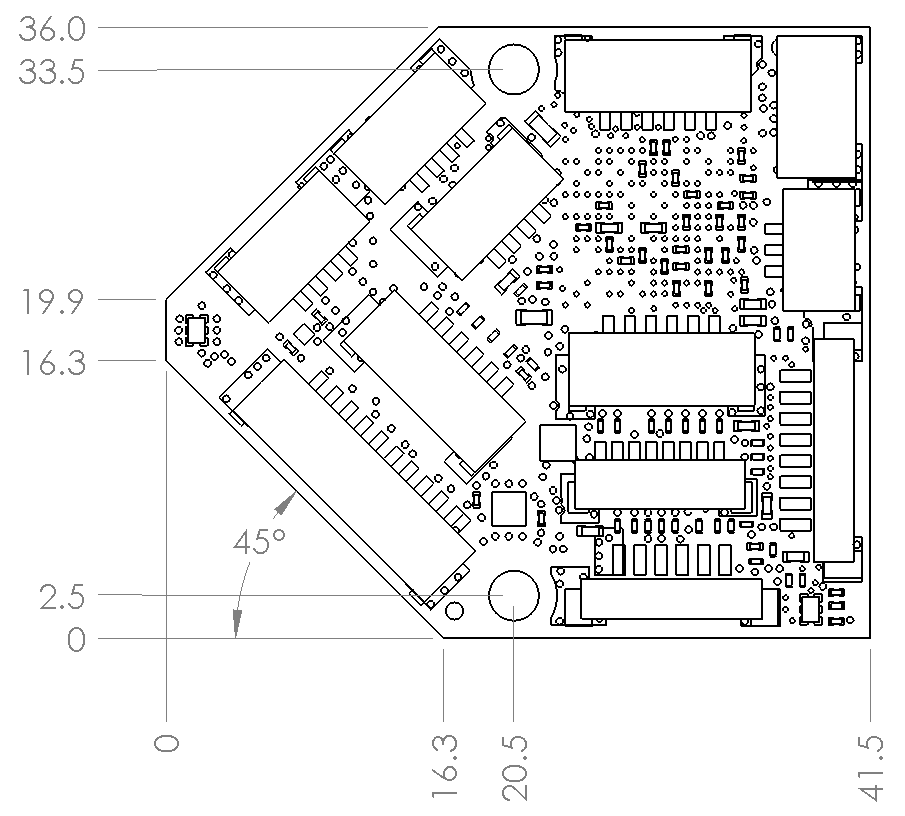
# 크기
# PX4 Firmware Compatibility
Flight Core v1은 PX4 v1.11의 펌웨어와 완벽하게 호환됩니다.
ModalAI는 PX4 v1.11용 분기 PX4 버전 (opens new window)을 유지합니다. 여기에는 UART ESC 지원과 업스트림 예정인 VIO와 VOA의 개선 사항이 포함됩니다.
펌웨어에 관련된 더 많은 정보는 여기 (opens new window)를 참고하십시오.
# QGroundControl 지원
이 보드는 QGroundControl 4.0 이상에서 지원됩니다.
# 구매처
- Flight Core Complete Kit (opens new window)
- 단일 PCB에서 VOXL Companion Computer와 통합 Flight Core (opens new window)
- VOXL 보조 컴퓨터 및 장애물 회피 카메라(VOXL Flight Deck)와 통합 플라이트 코어 (opens new window) (데이터시트 (opens new window))
- VOXL와 카메라로 조립된 Flight Core (opens new window)
# 빠른 시작
# 방향
아래 다이어그램은 PX4 v1.11(및 ModalAI가 유지하는 PX4 v1.10 브랜치 (opens new window))부터 ROTATION_NONE 권장 방향을 나타냅니다.
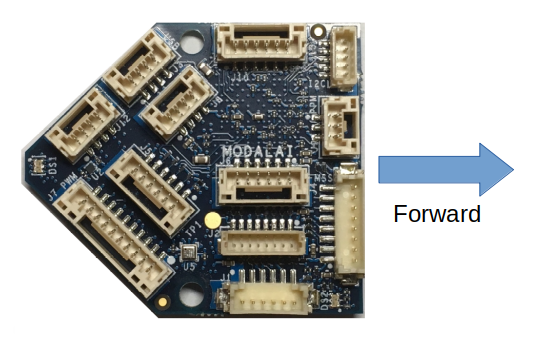
WARNING
QGroundControl의 PX4 v1.10 안정 릴리스의 경우에는 위 방향으로 ROTATION_YAW_180을 사용합니다.
# 커넥터
핀배열에 관련된 더 많은 정보는 여기 (opens new window)을 참고하십시오.
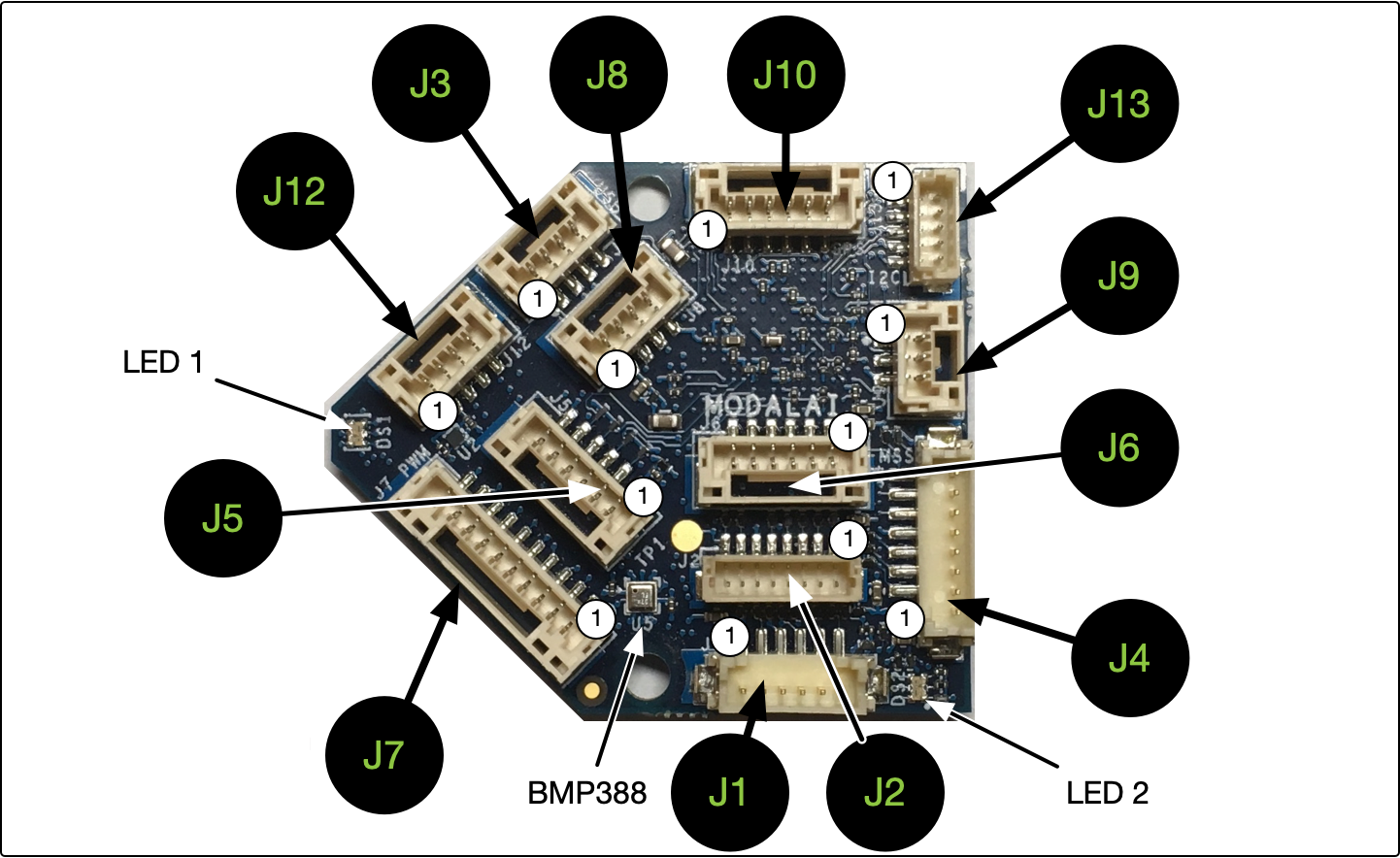
| 커넥터 | 요약 |
|---|---|
| J1 | VOXL 통신 인터페이스 커넥터 (TELEM2) |
| J2 | 프로그래밍 및 디버그 커넥터 |
| J3 | USB 커넥터 |
| J4 | UART2, UART ESC (TELEM3) |
| J5 | 텔레메트리 커넥터 (TELEM1) |
| J6 | VOXL - 전원 관리 입력/확장 |
| J7 | 8 채널 PWM 출력 커넥터 |
| J8 | CAN 버스 커넥터 |
| J9 | PPM RC 입력 |
| J10 | 외부 GPS 및 자력계 커넥터 |
| J12 | RC 입력, Spektrum/SBus/UART 커넥터 |
| J13 | I2C 디스플레이(예비 센서 커넥터)/안전 버튼 입력 |
# 사용자 가이드
전체 사용자 가이드는 여기 (opens new window)를 참고하십시오.
# 빌드 방법
이 대상에 대한 PX4 빌드 방법:
make modalai_fc-v1
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J10) |
| USART2 | /dev/ttyS1 | TELEM3 (J4) |
| USART3 | /dev/ttyS2 | 디버깅 콘솔(J2) |
| UART4 | /dev/ttyS3 | 확장 UART (J6) |
| UART5 | /dev/ttyS4 | TELEM2, 기본 VOXL 통신 (J1) |
| USART6 | /dev/ttyS5 | RC (J12) |
| UART7 | /dev/ttyS6 | TELEM1 (J5) |
| UART8 | /dev/ttyS7 | 해당없음 |
# 지원
자세한 내용은 ModalAI 포럼 (opens new window)을 참고하십시오.