# Lidar-Lite
LIDAR-Lite는 드론, 로봇 또는 무인 차량용 소형 고성능 광학 원거리 측정 센서입니다. I2C 또는 PWM에 연결됩니다.

# 구매처
- LIDAR-Lite v3 (opens new window) (5cm - 40m)
# 핀배열
Lidar-Lite (v2, v3) 핀배열은 아래와 같습니다.
| 핀 | 명칭 | 설명 |
|---|---|---|
| 1 | POWER_IN | 전원 공급. 4.75-5.5V DC 공칭, 최대 6V DC. |
| 2 | POWER_EN | 액티브 하이는 3.3V 마이크로 컨트롤러 레귤레이터의 작동을 가능하게 합니다. Low puts board to sleep, draws <40 μA. (내장 100K pull-up) |
| 3 | 모드 선택 제어 | 트리거 (하이-로우 에지) PWM 출력 (하이) 제공 |
| 4 | SCL | I2C Clock |
| 5 | SDA | I2C 데이터 |
| 6 | GND | 신호/전원 접지. |
# 배선
Lidar-Lite v3는 PWM 또는 I2C와 함께 사용합니다. 구형 모델에서는 PWM을 권장합니다. 거리계는 일부 ESC/BEC(PWM 또는 I2C를 통해 연결됨)로 별도 전원이 공급되어야합니다.
Note
블루 라벨이 아닌 Lidar-Lite (v1) 장치의 I2C 인터페이스에는 안정성 제한이 있으며, 따라서 모든 실버 라벨 세대의 Lidar-Lite 센서는 I2C 인터페이스에서 제외됩니다. 이러한 센서에는 PWM 인터페이스(아래에 자세히 설명)를 사용하는 것이 좋습니다. 파란색 레이블(v2) 장치는 일부 조건에서 5V 미만 전원을 사용하며, 일정한 오프셋을 나타낼 수 있습니다. 이는 현재 (2015 년 4 분기) 제조업체에서 조사 중이며, 특정 운영 조건을 준수하여 잠재적으로 해결 가능합니다. 권장되는 강력한 설정은 PWM 인터페이스를 가진 v1 장치입니다.
Lidar-Lite 3(작동 설명서 (opens new window)에서)의 표준 배선 방법은 다음과 같습니다. Lidar-Lite v2와 v3은 커넥터의 핀 순서가 역전된다는 점을 제외하면 동일합니다 (즉, 커넥터가 뒤집힌 것처럼).
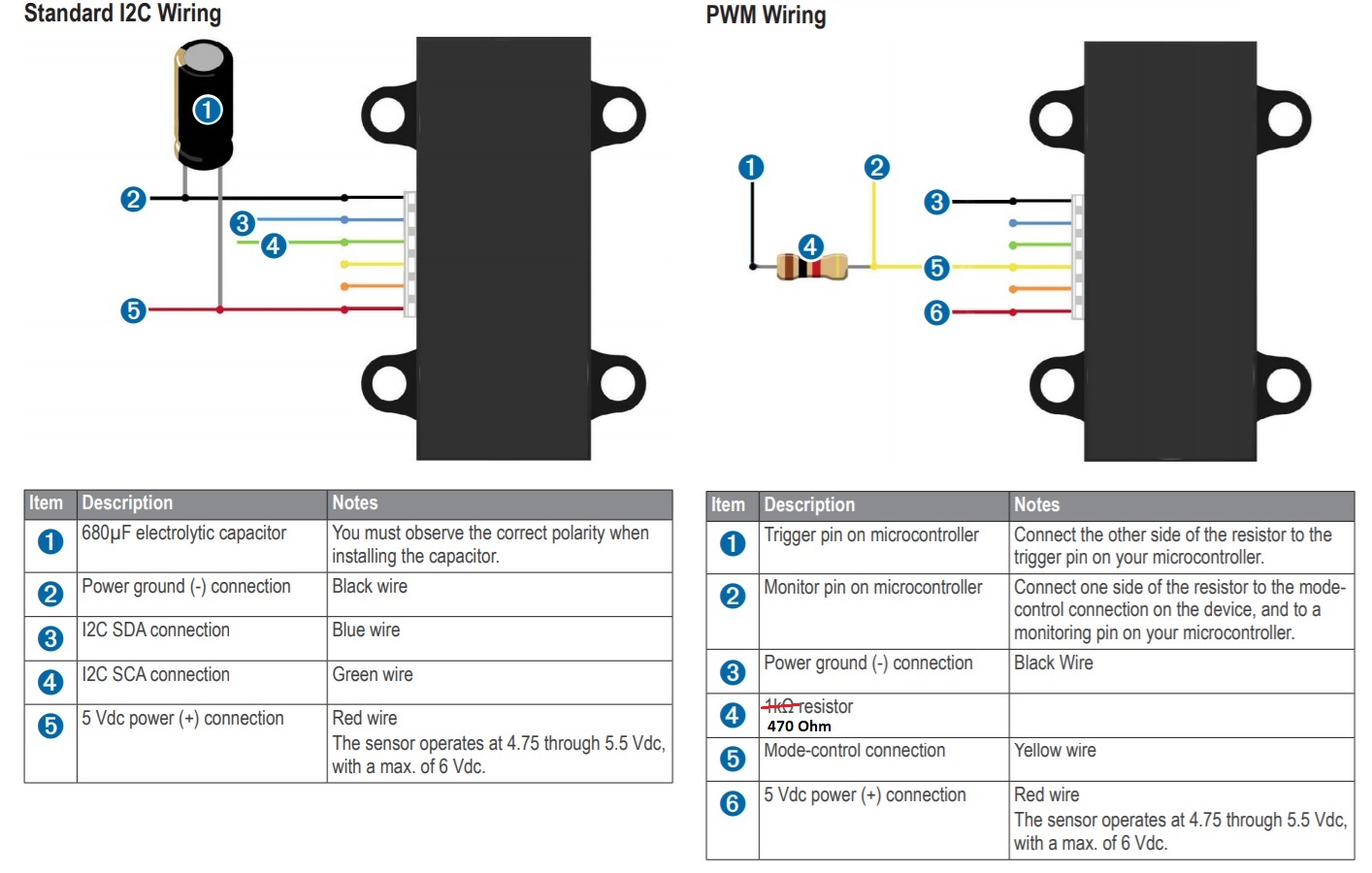
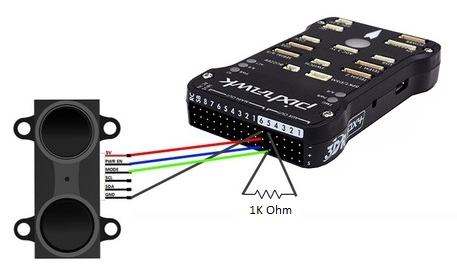
# PWM 인터페이스 배선
LidarLite를 Pixhawk 1 AUX 포트 (PWM 인터페이스) 핀 연결은 아래와 같습니다.
| 핀 | Lidar-Lite (v2, v3) | Pixhawk AUX Servo | 설명 |
|---|---|---|---|
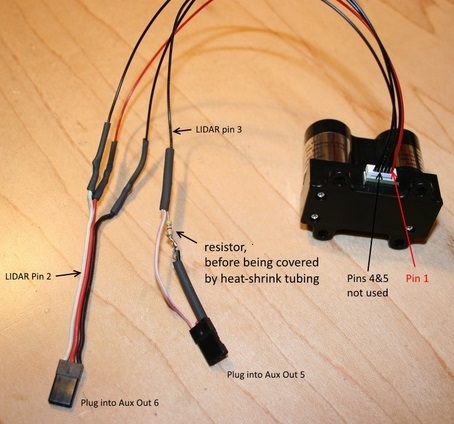
| 1 | VCC | AUX 6 (중앙) | 전원 공급. 4.75-5.5V DC 공칭, 최대 6V DC. |
| 2 | RESET | AUX 6 (하단) | 센서의 재설정 라인 |
| 3 | PWM | AUX 5 (하단) | Lidar Lite의 PWM 출력. 470 Ohm 풀다운 (GND로)이 필요합니다. 1K0hm 저항을 사용하지 마십시오. |
| 4 | SCL | - | 연결되지 않음 |
| 5 | SDA | - | 연결되지 않음 |
| 6 | GND | AUX 6 (상단) | 접지 |
Note
AUX 포트가 없는 비행 콘트롤러에서는 동등한 MAIN 핀이 사용됩니다 (예 : 라이더의 PWM 출력이 대신 MAIN 5에 매핑됨). 핀 번호는 하드 코딩되어 있습니다.
LidarLite v2의 배선은 아래와 같습니다. Lidar-Lite v3는 커넥터의 핀 번호가 반대라는 점을 제외에는 유사하게 연결됩니다.

# I2C 인터페이스 배선
I2C 배선은 다른 거리 센서에 대해서도 동일합니다. SLA, SLC, GND 및 VCC를 비행 콘트롤러와 센서의 해당 (동일한) 핀에 연결하면 됩니다.
# 소프트웨어 설정
거리계/포트는 SENS_EN_LL40LS를 사용하여 활성화됩니다. PWM의 경우 1, I2C의 경우 2로 설정됩니다.
Note
이 거리계의 드라이버는 펌웨어에서 제공됩니다. 존재하지 않으면, 보드 설정에 드라이버(drivers/ll40ls)를 추가하여야 합니다.