# Pixhawk 3 프로
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://store-drotek.com/)에 문의하십시오.
Pixhawk® 3 Pro는 일부 업그레이드와 기능이 추가된 FMUv4 하드웨어 설계 (Pixracer)를 기반으로합니다. 이 보드는 Drotek® (opens new window)과 PX4에 의해 설계되었습니다.

Note
주요 하드웨어 문서는 여기를 참고하십시오. https://drotek.gitbook.io/pixhawk-3-pro/hardware
TIP
이 자동조종장치는 PX4 유지관리 및 테스트 팀에서 지원합니다.
# 요약
- 마이크로컨트롤러 : STM32F469; 플래시 용량은 2MiB, RAM 용량은 384KiB입니다.
- ICM-20608-G 자이로 / 가속도계
- MPU-9250 자이로 / 가속도계 / 자력계
- LIS3MDL 나침반
- 2개의 SPI 버스를 통해 연결된 센서(고속 버스 1개와 저잡음 버스 1개)
- 2개의 I2C 버스
- CAN 버스 2 개
- 2 개의 전원 모듈에서 전압 / 배터리 판독
- FrSky® 인버터
- 메인 8 개 + AUX PWM 출력 6개(개별 IO 칩, PX4IO)
- microSD (로깅)
- S.BUS / Spektrum / SUMD / PPM 입력
- JST GH 사용자 친화적 커넥터 : Pixracer와 동일한 커넥터와 핀배열
# 구매처
Drotek 상점 (opens new window)에서 구매 (EU) :
readymaderc (opens new window)에서 구매 (미국) :
# 펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. 하드웨어가 연결되면 *QGroundControl*에 의해 사전 구축되고 자동으로 설치됩니다.
:::
이 대상에 대한 PX4 빌드 :
make px4_fmu-v4pro_default
# 디버그 포트
보드에는 아래와 같은 FMU와 IO 디버그 포트가 있습니다.
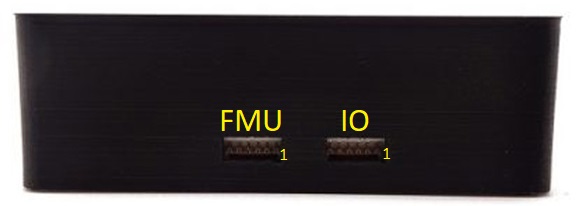
핀배열과 커넥터는 Pixhawk 표준 디버그 포트 (opens new window)(JST SM06B 커넥터)를 준수합니다.
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC TARGET SHIFT | +3.3V |
| 2 (흑) | CONSOLE TX (출력) | +3.3V |
| 3 (흑) | CONSOLE RX (입력) | +3.3V |
| 4 (흑) | SWDIO | +3.3V |
| 5 (흑) | SWCLK | +3.3V |
| 6 (흑) | GND | GND |
이 포트의 배선과 사용 정보는 다음을 참조하십시오.
- PX4 시스템 콘솔 (참고, FMU 콘솔은 UART7에 매핑됨).
- SWD (JTAG) 하드웨어 디버깅 인터페이스
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | 와이파이 |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | ||
| UART7 | 콘솔 | |
| UART8 | SERIAL4 |