# 홀리브로 Pixhawk 미니
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://shop.holybro.com/)에 문의하십시오.
홀리브로 Pixhawk® 미니 자동조종장치는 Pixhawk의 차세대 제품입니다. 원래 Pixhawk의 약 1/3 크기이며 더 강력한 프로세서와 센서를 제공합니다.
Pixhawk 미니는 PX4 오픈 하드웨어 프로젝트를 기반으로하며 PX4 플라이트 스택에 최적화되었습니다.

배선 방법은 여기를 참고하십시오.
Note
이 비행 컨트롤러는 HobbyKing®와 3DR에서 공동으로 설계하였습니다. It was formerly known as the 3DR Pixhawk Mini.
TIP
이 자동조종장치는 PX4 유지관리 및 테스트 팀에서 지원합니다.
# 사양
프로세서:
- 주 프로세서: STM32F427 Rev 3
- IO 프로세서: STM32F103
센서:
- 가속/자이로/자력: MPU9250
- PX4 펌웨어에서 지원 중단 (opens new window)
- 가속/자이로: ICM20608
- 기압계: MS5611
정격 전압:
- 전원 모듈 출력: 4.1~5.5V
- 최대 입력 전압: 45V (10S LiPo)
- 최대 전류 감지: 90A
- USB 전원 입력: 4.1`5.5V
- 서보 레일 입력: 0~10V
인터페이스:
- UART 직렬 포트 (GPS 용) 1개
- Spektrum DSM/DSM2/DSM-X® Satellite 호환 입력
- Futaba S BUS® 호환 RC 입력
- PPM 합계 신호 RC 입력
- I2C (디지털 센서용)
- CAN (호환 컨트롤러 디지털 모터 제어용)
- ADC (아날로그 센서용)
- 마이크로 USB 소켓
중량과 크기 :
- 크기: 38x43x12mm
- 중량: 15.8g
GPS 모듈 (키트와 함께 제공) :
- GNSS 수신기: u-blox® Neo-M8N; 나침반 HMC5983
- 중량: 22.4g
- 크기: 37x37x12mm
# 구매처
shop.holybro.com (opens new window)
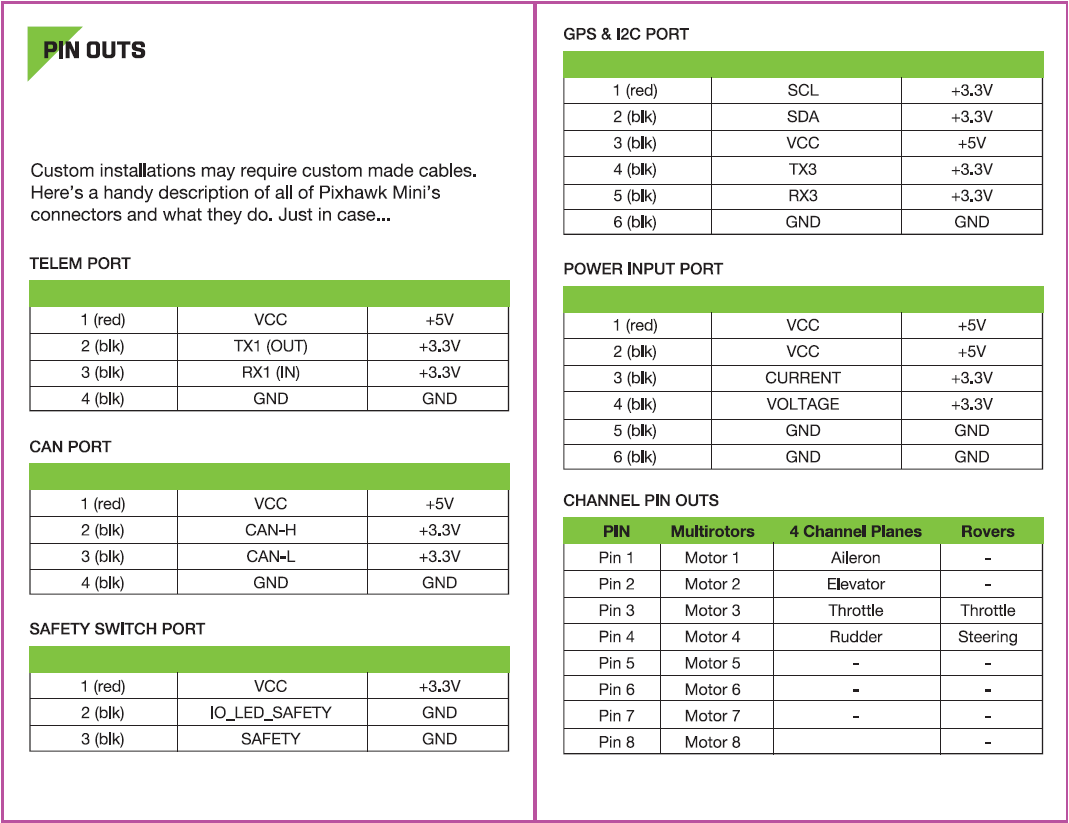
# 커넥터 할당
<To be added>
# 특징
Pixhawk 미니의 주요 특징은 다음과 같습니다.
- NuttX RTOS 실행 고급 32 비트 ARM Cortex® M4 프로세서
- PWM/Servo 출력 8개
- 추가 주변 장치(UART, I2C, CAN) 다양한 연결 옵션
- 중복 전원공급장치 및 자동 장애 조치
- 간편한 모터 활성화를 위한 통합 안전 스위치 및 옵션 외부 안전 버튼
- 다색 LED 표시기
- 통합 멀티톤 피에조 오디오 표시기
- 장기간 고속 로깅을 위한 microSD 카드
- 사용하기 쉬운 Micro JST 커넥터
Pixhawk 미니는 새로운 GPS 모듈과 함께 제공됩니다.
- u-blox M8N 기반
- 최대 3 개의 GNSS(GPS, Galileo, GLONASS, BeiDou) 동시 수신
- 업계 최고의 –167dBm 탐색 감도
- 보안 및 무결성 보호
- 모든 위성 증강 시스템 지원
- 고급 재밍 및 스푸핑 감지
- 성능 및 비용 요구 사항을 충족하는 제품 변형
# 키트 패키지
Pixhawk 미니는 다음 내용물과 함께 배송됩니다.
| 부품 | 이미지 |
|---|---|
| 픽스호크 미니 자동항법장치 |  |
| GPS 모듈 |  |
| 쿼드 배전 보드 |  |
| 8 채널 PWM 브레이크 아웃 보드 |  |
| 4 핀 케이블 (I2C 용) |  |
| PPM/SBUS용 RC-in 케이블 |  |
| GPS 및 추가 I2C 장치용 6 ~ 6/4 ‘Y’ 어댑터 |  |
| 6 핀 케이블 (2) (배전반 및 나침반/gps 용) |  |
| 레거시 원격 측정 라디오를 위한 6 핀 JST-DF13 |  |
| 안전 스위치 |  |
| 8 채널 PWM 브레이크아웃 케이블 | 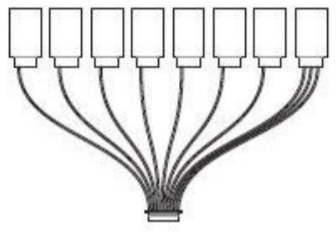 |
| 장착 폼 |  |
| I2C 브레이크 아웃 보드? - 유인물에 나열되지 않은 부품 | - |
# 옵션 액세서리
텔레메트리 라디오 세트 : 915MHz (미국), 433MHz (유럽) :::note 3DR 텔레메트리 설치시 함께 제공되는 커넥터가 아닌 Pixhawk Mini와 함께 제공되는 커넥터를 사용하십시오. :::
3DR 10S 전원 모듈
WiFi 텔레메트리
디지털 대기속도 센서
# 호환성
# RC 라디오
- PPM 출력 RC 수신기
- Spektrum DSM RC 수신기
- Futaba S BUS RC 수신기
# ESC
- 모든 표준 PWM 입력 ESC
# 커넥터 핀 할당(핀 배열)
# 제품 비교
# Pixhawk 미니와 Pixhawk(원본) 비교
- 크기의 1/3 - 50x81.5x15.5mm에서 38x43x12mm까지.
- 2MB 플래시 메모리를 최대한 활용하기위한 Rev 3 프로세서.
- 1차 및 2차 IMU MPU9250 및 ICM20608 모두 개선된 센서. 안정적인 비행과 내비게이션이 가능합니다.
- GPS + 나침반 모듈이 포함되어 있습니다. GLONASS를 지원하는 Neo M8N이 특징입니다. 나침반 HMC5983. 더 빠르고 강력한 GPS 잠금을 기대하십시오.
- DF-13 대체 마이크로 JST 커넥터. 작업이 훨씬 용이합니다.
- 통합 피에조 스피커 및 안전 스위치.
- 기본적으로 포함된 PDB로 4S 배터리를 지원합니다.
# Pixhawk 미니와 Pixfalcon 비교
- 1차 및 2차 IMU MPU9250 및 ICM20608 개선된 센서. 더 나은 진동 처리와 신뢰성을 기대하십시오.
- UAVCAN 지원 CAN 인터페이스.
- 전력 PWM 출력이 필요한 비행기와 기타 차량용 8 채널 브레이크아웃 서보 레일이 포함되어 있습니다.
- 총 5 개의 I2C 연결용 I2C 브레이크아웃 보드를 포함합니다.
- 유사 크기.
Pixhawk 미니는 ST Microelectronics®의 고급 프로세서 및 센서 기술과 NuttX 실시간 운영체제로 자율 주행 차량을 제어에 뛰어난 성능, 유연성 및 안정성을 제공합니다.
# 알려진 문제
- 일부 Pixhawk 미니에는 내부 MPU9250 IMU를 신뢰할 수 없게 만드는 하드웨어 결함 (opens new window)이 있습니다.
- 이 문제는 제조업체에 의해 수정되었으며 (opens new window), 이전 하드웨어 버전에만 존재합니다.
- 특정 보드가 영향 여부를 확인하려면, 보드를 잠시 분리한 상태에서 전원을 켜고 PX4 명령 줄에서 mpu9250 드라이버를 시작하십시오. 보드가 영향을 받으면, 드라이버가 시작되지 않습니다.
- MPU9250은 PX4 펌웨어에서 기본적으로 비활성화되어 있습니다 (opens new window).
- 결함이 존재하는 Pixhawk 미니는 실내에서도 외부 자력계 또는 부착된 GPS 없이는 보정되지 않습니다.
- 외부 GPS를 사용하는 경우 보조 ICM20608은 가속도계와 자이로를 제공하고 외부 GPS는 자력계를 제공하므로 문제가 되지않습니다 (opens new window).
# 배선 개요
WARNING
Pixhawk 미니는 더 이상 3DR에서 제조되거나 제공되지 않습니다.
This quick start guide shows how power the Pixhawk Mini and connect its most important peripherals.
# 배선 개요 챠트
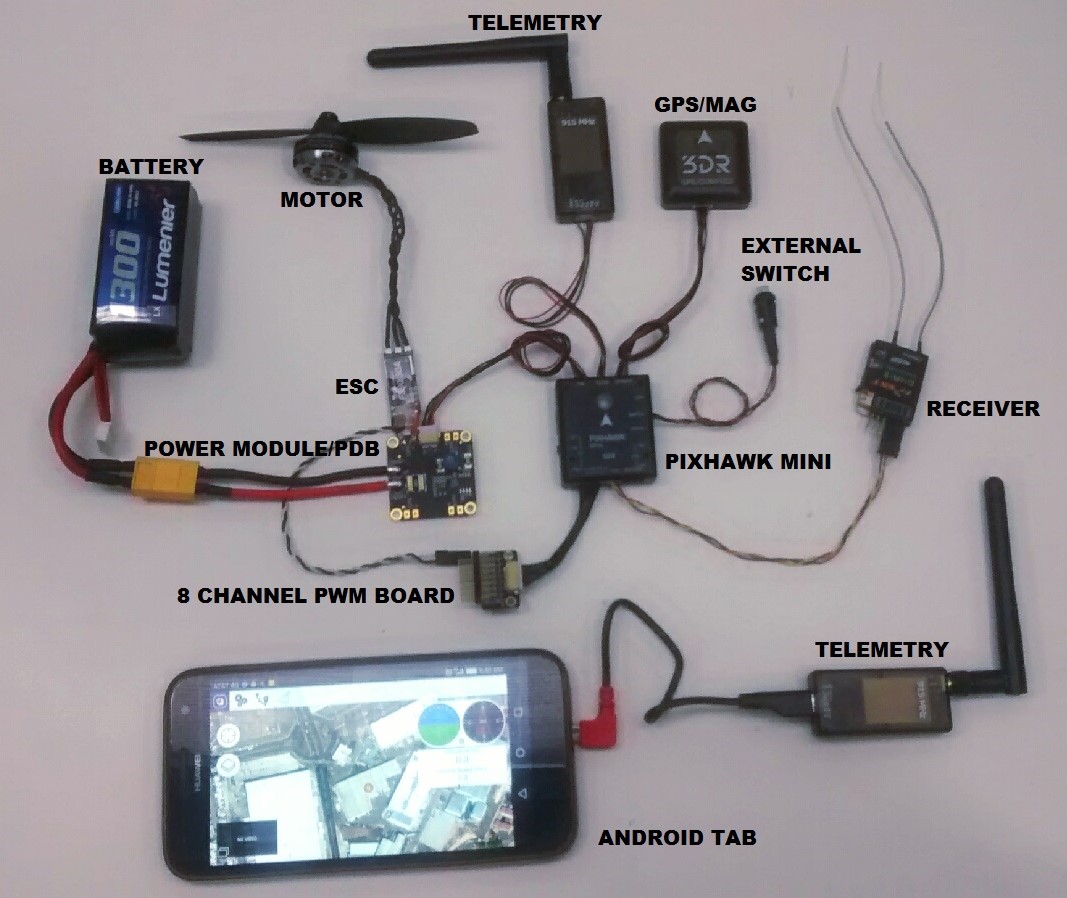
아래 이미지는 Pixhawk Mini Kit 및 3DR Telemetry Radio를 사용하는 표준 쿼드콥터 배선을 나타냅니다 (ESC, 모터, 배터리 및 폰에서 실행되는 지상제어국 포함). 다음 섹션에서 각 장치에 대해 자세히 설명합니다.
Note
출력 배선/전원은 차량 유형에 따라 약간의 차이가 있습니다. VTOL, Plane, Copter에 대해서는 아래에서 자세히 설명합니다.
# 콘트롤러 장착 및 장착 방향
Pixhawk 미니는 진동 감쇠 폼 패드(키트에 포함)사용하여 프레임에 장착하여야 합니다. 기체의 무게 중심에 최대한 가깝게, 화살표가 차량 전면과 위쪽 방향을 향하여야 합니다.
![]()
Note
컨트롤러를 권장/기본 방향으로 장착하기 어려운 경우에는 (예 : 공간 제약으로 인해) 실제 장착한 방향을 소프트웨어에 설정하여야 합니다(기체 콘트롤러 방향 참고).
# GPS와 나침반
제공된 6핀 케이블을 사용하여 3DR GPS + Compass를 Pixhawk 미니의 GPS & I2C 포트(오른쪽 상단)에 연결합니다. GPS/나침반은 차량 전명 방향 표시를 사용하여 가능한 한 다른 전자 장치에서 멀리 떨어진 프레임에 장착해야합니다 (나침반을 다른 전자 장치와 분리하면 간섭이 줄어듦).

참고 - 두 포트를 모두 표시하는 삽입 이미지? 또는 GPS & I2C의 전면 이미지
나침반은 최초 사용전에 보정하여야 합니다.
# 전원
아래의 이미지는 쿼드콥터에서 Pixhawk 미니를 사용시 일반적인 전원 배선을 나타냅니다. 키트에 포함 된 쿼드 배전 보드를 사용하여 배터리에서 Pixhawk 미니와 ESC/모터에 전원을 공급합니다. 다른 액세서리에도 전원을 공급할 수 있습니다.
Note
쿼드 배전반에는 4S 이하의 배터리에 적합한 전원 모듈(PM)이 포함되어 있습니다. 더 많은 전력이 필요한 경우에는 3DR 10S 전원 모듈(단종)을 권장합니다.
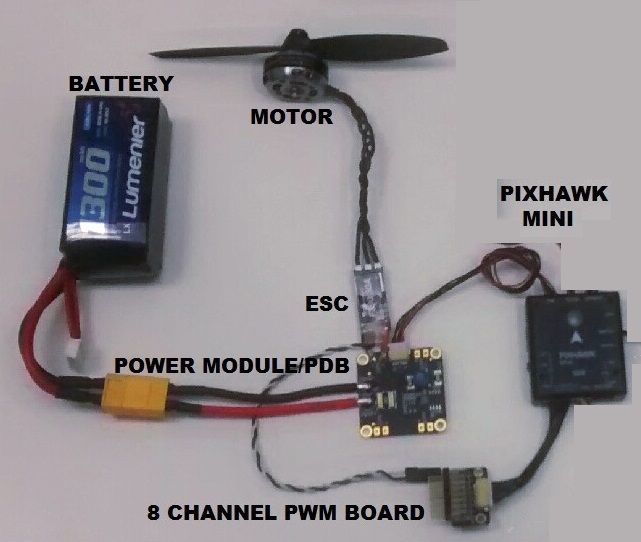
전원 모듈 포트를 통해 Pixhawk 미니에 전원이 공급됩니다. 전원 모듈 시용시 포트를 통하여 아날로그 전압과 전류를 측정합니다.
배전반에서 최대 4 개의 ESC에 개별적으로 전원을 공급할 수 있습니다 (이 경우 하나만 연결되어 있음).
제어 신호는 MAIN OUT에서 나옵니다. 8 채널 PWM 브레이크아웃 보드를 통해 ESC에 연결된 제어 채널이 하나뿐입니다.
Pixhawk 미니 출력 레일 (MAIN OUT)은 연결된 장치에 전원을 공급할 수 없습니다(그림과 같이 회로에 필요하지 않음). MAIN OUT이 전력을 끌어 오는 장치(예 : 비행기에서 사용되는 서보)에 연결된 차량의 경우 BEC (배터리 제거 회로)를 사용하여 레일에 전원을 공급하여야 합니다. 브레이크아웃 보드를 통해 한 채널이 다른 출력에 전원을 공급할 수 있습니다.
# 무선 조종
Pixhawk 미니는 다양한 무선 수신기 모델을 지원합니다.
Spektrum 및 DSM 수신기는 SPKT/DSM 포트에 연결하여야 합니다.

PPM-SUM과 S.버스 수신기는 RCIN 포트에 연결합니다.

각각의 채널이 독립적으로 배선된 PPM/PWM 수신기는 반드시RCIN포트에 PPM 인코더를 통하여 아래와 같이 (opens new window)연결하여야 합니다 (PPM-Sum 수신기는 모든 채널에 하나의 전선만 사용합니다).
무선 시스템 선택, 수신기 호환성 및 송신기/수신기 바인딩에 대한 자세한 내용은 다음을 참고하십시오. 원격 제어 송신기 & 수신기.
# 안전 스위치(선택 사항)
컨트롤러에는 자동조종장치가 이륙 준비가 되면 모터 활성화를 위한 안전 스위치가 있습니다. 특정 기체에서 이 스위치에 접근하기 어려운 경우에는 아래와 같이 외부 안전 버튼(선택 사항)을 장착할 수 있습니다.
# 텔레메트리 무선 통신
# 모터
지원되는 모든 기체의 MAIN/AUX 출력 포트와 모터/서보 간의 매핑은 기체 정의서에 기술되어 있습니다.
:::caution 매핑이 프레임간에 일관되지 않습니다 (예 : 모든 평면 프레임에 대해 동일한 출력에있는 스로틀에 의존 할 수 없음). 가지고 있는 기체의 프레임에 대해 올바르게 모터를 제대로 연결하였는지 다시 한 번 확인하십시오. :::
TIP
프레임이 기체 참조 목록에 없으면, 올바른 유형의 "일반"기체를 사용하십시오.
참고:
- 출력 레일은 위의 전원 섹션에 설명과 같이 별도의 전원이 공급되어야 합니다.
- Pixhawk 미니는 QuadPlane VTOL 기체에 사용할 수 없습니다. 이는 QuadPlane에 9 개의 출력(메인 4 개, AUX 5 개)이 필요하고, Pixhawk 미니에는 8 개의 출력 (8 메인)만 필요하기 때문입니다.

# 기타 주변 장치
선택적인 주변 장치의 배선과 설정은 개별 주변 장치에서 기술합니다.
# 설정
더 자세한 일반 설정 방법은 자동항법장치 설정을 참고하십시오.
QuadPlane에 대한 자세한 설정은 QuadPlane VTOL 설정에서 다룹니다.
# 펌웨어 빌드
대부분의 사용자들은 펌웨어를 빌드할 필요는 없습니다. 하드웨어가 연결되면 *QGroundControl*에 의해 사전 구축되고 자동으로 설치됩니다.
:::
이 대상에 대한 PX4 빌드 방법 :
make px4_fmu-v3_default
# 디버그 포트
이 보드에는 디버그 포트가 없습니다 (즉, 시스템 콘솔 또는 SWD (JTAG) 하드웨어 디버깅 인터페이스 접근 포트가 없습니다.
개발자는 SWD용 보드 테스트 패드와 STM32F4 (IC) TX와 RX에 와이어를 납땜하여 콘솔을 획득할 수 있습니다.