# mRo Pixracer
PX4에서는 이 제품을 제조하지 않습니다. 하드웨어 지원과 호환 문제는 [제조사](https://store.mrobotics.io/)에 문의하십시오.
Pixhawk® XRacer 보드 제품군은 소형 레이싱 쿼드와 비행기에 최적화되어 있습니다. Pixfalcon과 Pixhawk와 달리 와이파이, 새로운 센서, 편리한 전체 서보 헤더, CAN 및 2M 플래시를 지원합니다.

TIP
이 자동조종장치는 PX4 유지관리 및 테스트 팀에서 지원합니다.
# 주요 특징
- 메인 시스템 온 칩 : STM32F427VIT6 rev.3 (opens new window)
- CPU : 단정밀도 FPU의 180MHz ARM Cortexex® M4
- RAM : 256KB SRAM (L1)
- 표준 FPV 폼 팩터 : 36x36mm, 표준 30.5mm 구멍 패턴
- Invensense® ICM-20608 가속 / 자이로 (4KHz) / MPU9250 가속 / 자이로 / 마그 (4KHz)
- 온도 보상 기능 HMC5983 자력계
- Measurement Specialties MS5611 기압계
- JST GH 커넥터
- microSD (로깅)
- Futaba S.BUS 및 S.BUS2 / Spektrum DSM2 및 DSMX / Graupner SUMD / PPM 입력 / Yuneec ST24
- FrSky® 텔레메트리 포트
- OneShot PWM 출력 (구성 가능)
- 옵션 : 안전 스위치 및 부저
# 구매처
Pixracer는 mRobotics.io (opens new window)에서 사용할 수 있습니다.
액세서리에는 다음이 포함됩니다.
- 디지털 대기속도 센서 (opens new window)
- HK 텔레프레전스 세트 V2 (915Mhz - US 텔레메트리) (opens new window)
- Hobbyking® OSD + EU 텔레메트리 (433 MHz) (opens new window)
# 키트
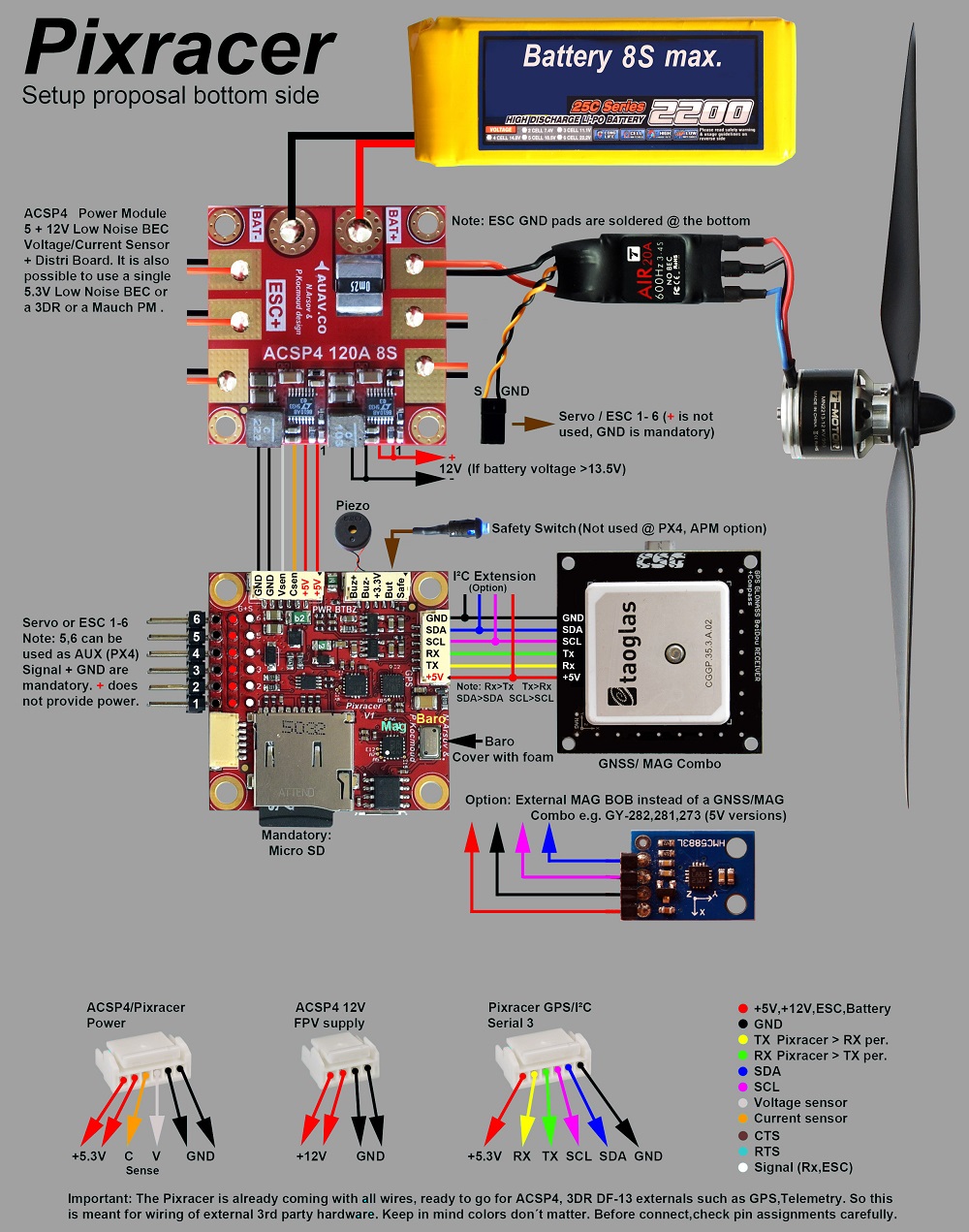
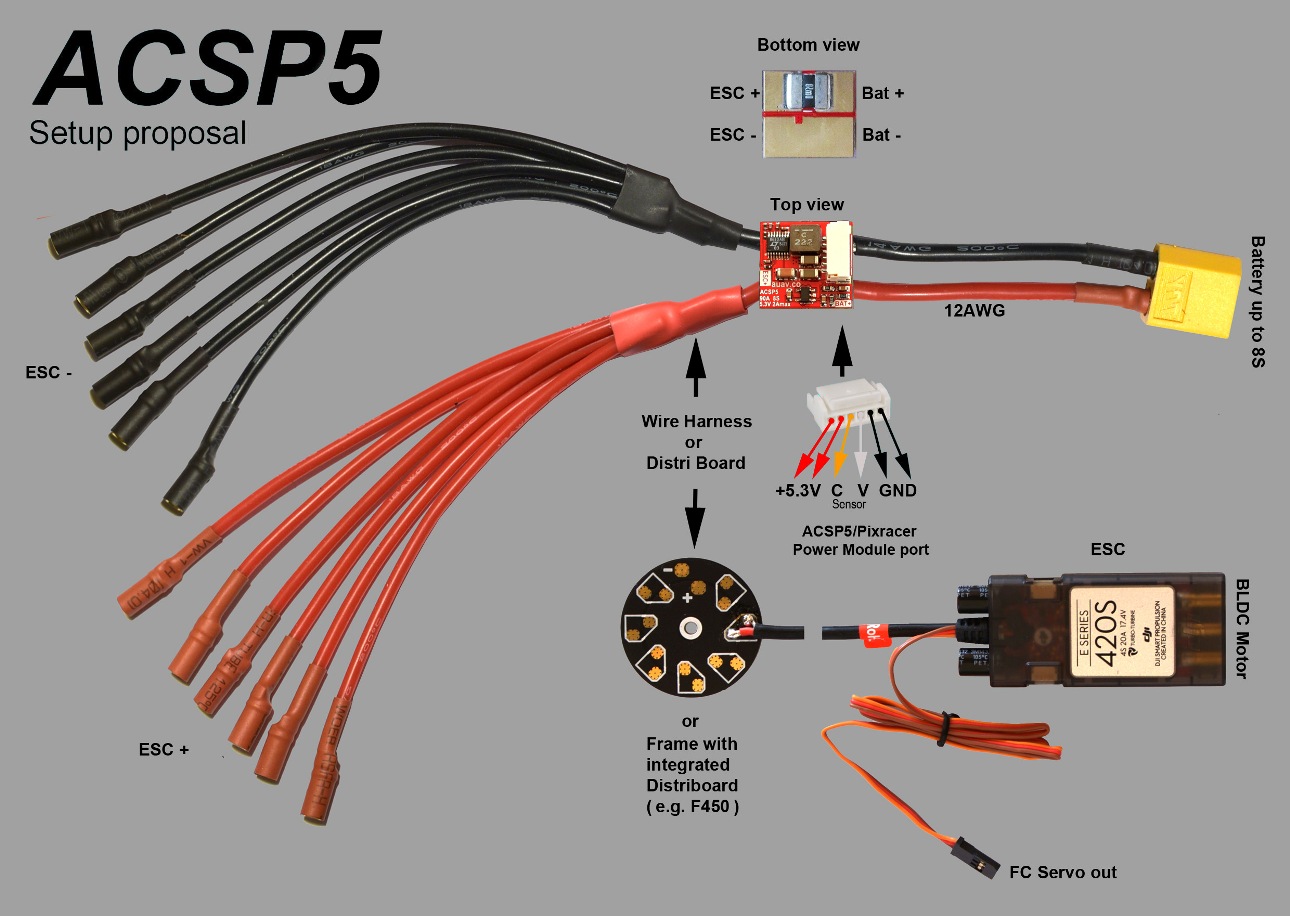
Pixracer는 별도의 항공전자기기 전원공급장치를 사용하도록 설계되었습니다. 이는 모터 또는 ESC의 전류 서지가 비행 컨트롤러로 다시 흐르고 섬세한 센서를 방해하는 것을 방지하는 데 필요합니다.
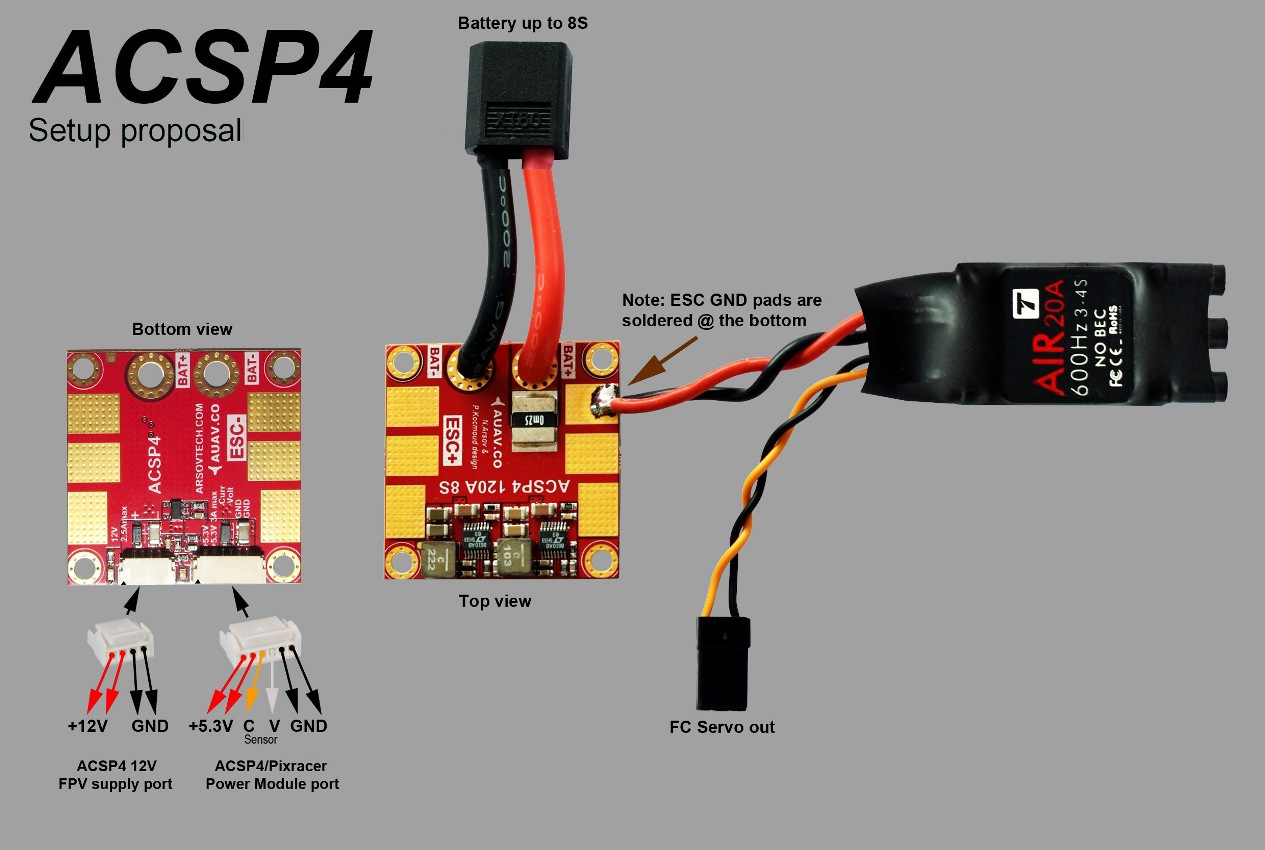
- 전원 모듈(전압 및 전류 감지 포함)
- I2C 스플리터(AUAV, Hobbyking 및 3DR® 주변 장치 지원)
- 모든 일반 주변기기용 케이블 키트
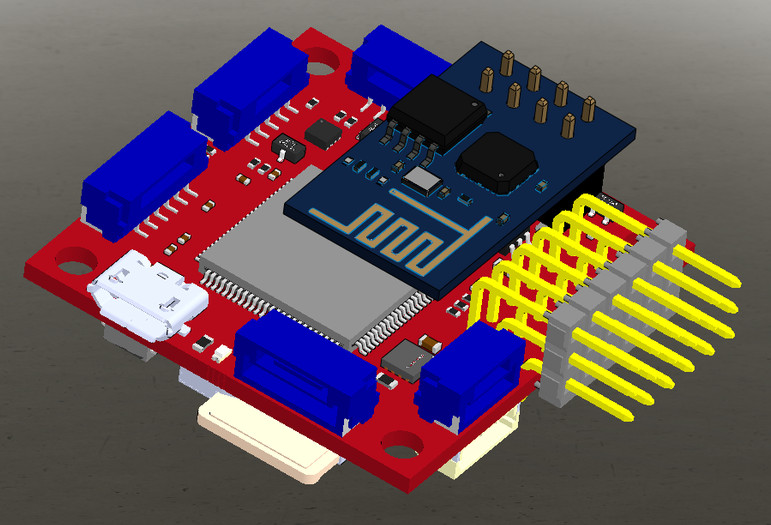
# Wi-Fi(USB 필요 없음)
보드의 주요 기능중 하나는 새 펌웨어, 시스템 설정과 기내 원격 측정을 위해 Wi-Fi를 사용할 수 있는 것입니다. 이를 통해 데스크탑 시스템이 필요없습니다.
::note ToDo 설정 및 원격 측정이 사용 가능하며, 펌웨어 업그레이드는 기본 부트로더에서 지원되지만, 아직 활성화되지 않았습니다. :::
# 배선 다이어그램
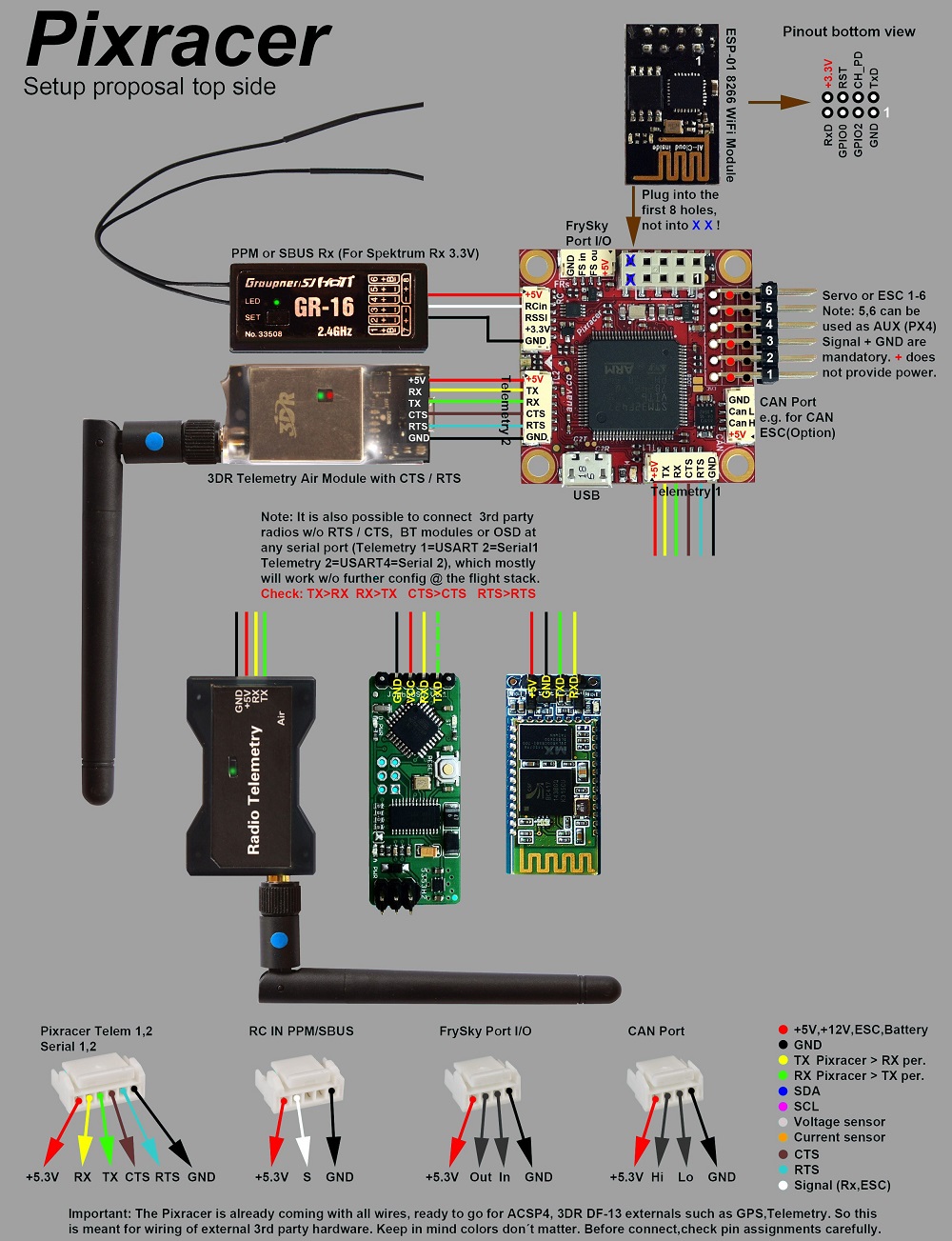

# 커넥터
모든 커넥터는 Pixhawk 커넥터 표준 (opens new window)을 준수합니다. 명시된 것이 없으면, 모든 커넥터는 JST GH입니다.
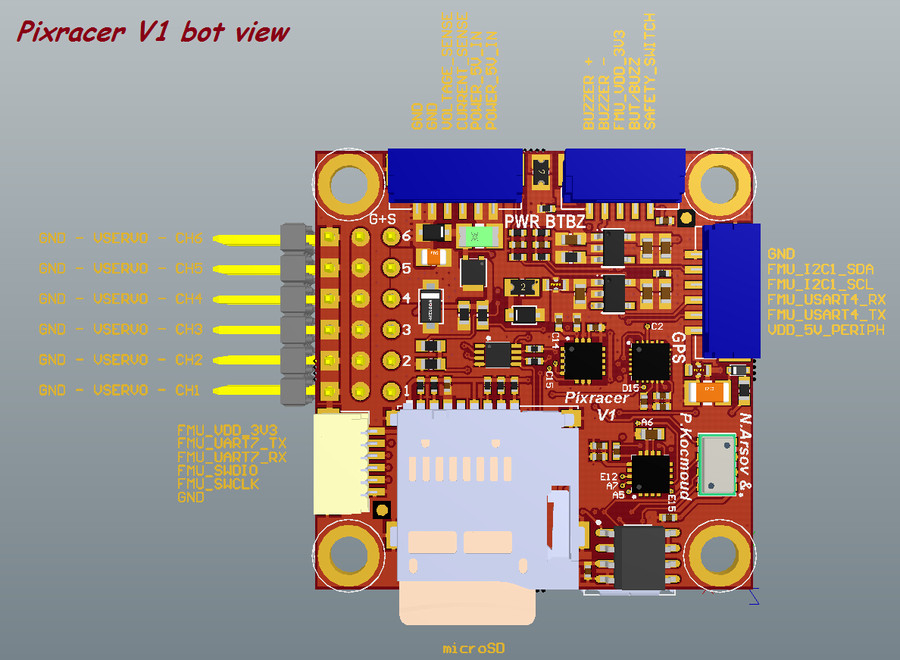
# 핀배열
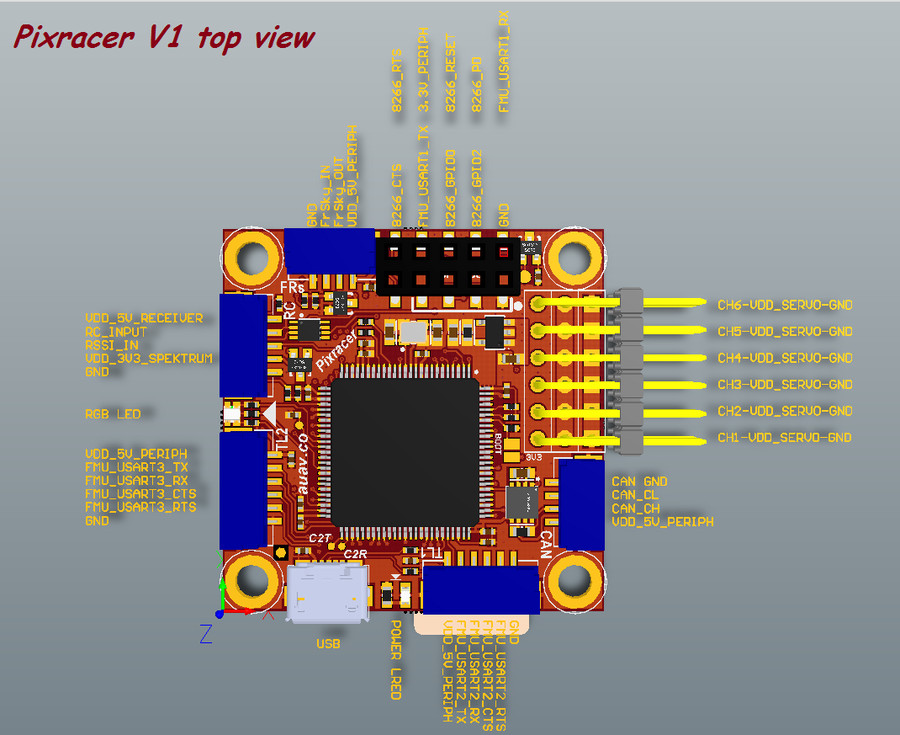
# TELEM1, TELEM2+OSD 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | CTS (입력) | +3.3V |
| 5 (흑) | RTS (출력) | +3.3V |
| 6 (흑) | GND | GND |
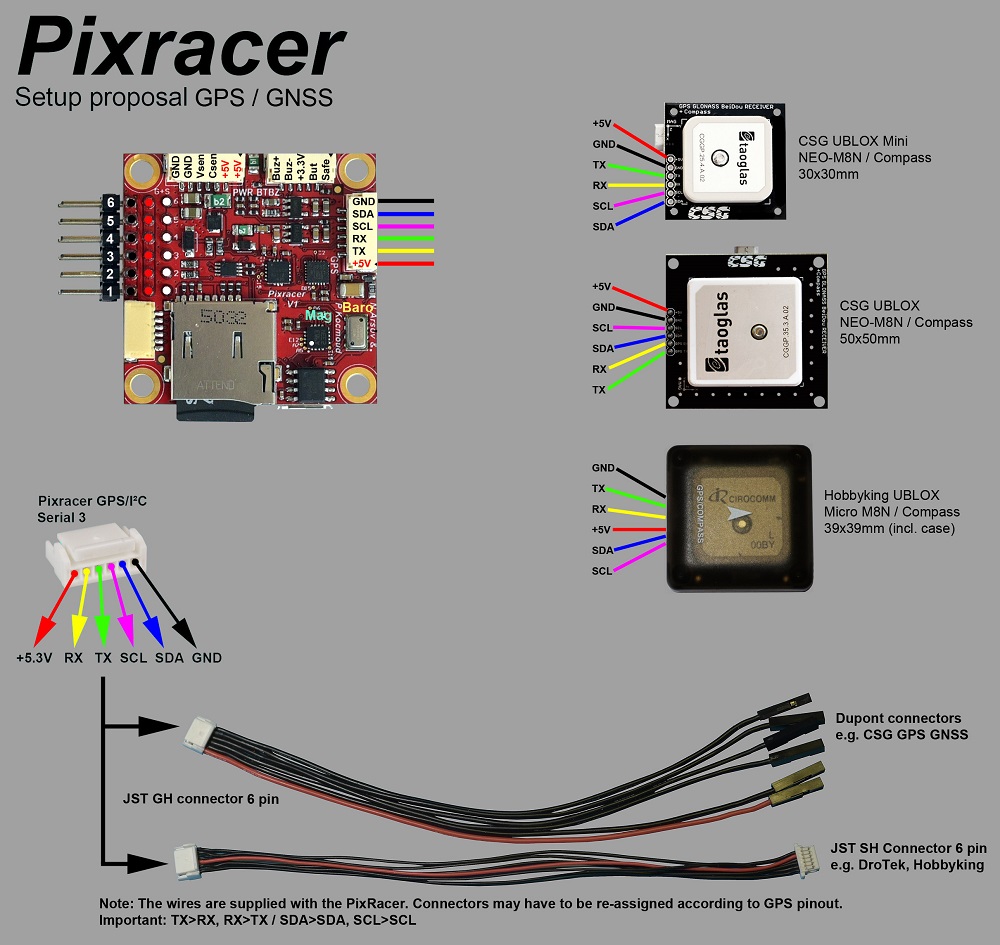
# GPS 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | I2C1 SCL | +3.3V |
| 5 (흑) | I2C1 SDA | +3.3V |
| 6 (흑) | GND | GND |
# FrSky 텔레메트리/SERIAL4
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | GND | GND |
# RC 입력(PPM/S.BUS/Spektrum/SUMD/ST24 허용)
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | RC 입력 | +3.3V |
| 3 (흑) | RSSI 입력 | +3.3V |
| 4 (흑) | VDD 3V3 | +3.3V |
| 5 (흑) | GND | GND |
# CAN
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | CAN_H | +12V |
| 3 (흑) | CAN_L | +12V |
| 4 (흑) | GND | GND |
# 전원
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC | +5V |
| 2 (흑) | VCC | +5V |
| 3 (흑) | 전류 | +3.3V |
| 4 (흑) | 전압 | +3.3V |
| 5 (흑) | GND | GND |
| 6 (흑) | GND | GND |
# 스위치
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | SAFETY | GND |
| 2 (흑) | !IO_LED_SAFETY | GND |
| 3 (흑) | VCC | +3.3V |
| 4 (흑) | BUZZER- | - |
| 5 (흑) | BUZZER+ | - |
# 디버그 포트
Pixhawk 디버그 포트 (opens new window)(JST SM06B 커넥터)입니다.
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (적) | VCC TARGET SHIFT | +3.3V |
| 2 (흑) | CONSOLE TX (출력) | +3.3V |
| 3 (흑) | CONSOLE RX (입력) | +3.3V |
| 4 (흑) | SWDIO | +3.3V |
| 5 (흑) | SWCLK | +3.3V |
| 6 (흑) | GND | GND |
이 포트의 배선과 사용 정보는 다음을 참조하십시오.
- PX4 시스템 콘솔(참고, FMU 콘솔은 UART7에 매핑됨).
- SWD (JTAG) 하드웨어 디버깅 인터페이스
# 시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| UART1 | /dev/ttyS0 | WiFi (ESP8266) |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | ||
| UART7 | 콘솔 | |
| UART8 | SERIAL4 |
# 회로도
참고 문서는 Altium Design Files (opens new window)에서 제공합니다.
다음 PDF 파일은 편의를 위해서 제공됩니다.
- pixracer-rc12-12-06-2015-1330.pdf (opens new window)
- pixracer-r14.pdf (opens new window) - R14 또는 RC14는 SDCard 소켓 옆에 인쇄됩니다.