# UAVCAN
![]() UAVCAN (opens new window)은 자동조종장치가 주변 장치에 연결하는 온보드 네트워크입니다. 견고한 차동 신호를 사용하고 버스를 통한 펌웨어 업그레이드와 주변 장치의 상태 피드백을 지원합니다.
UAVCAN (opens new window)은 자동조종장치가 주변 장치에 연결하는 온보드 네트워크입니다. 견고한 차동 신호를 사용하고 버스를 통한 펌웨어 업그레이드와 주변 장치의 상태 피드백을 지원합니다.
PX4는 UAVCAN 노드 할당 및 펌웨어 업그레이드를 위해 SD 카드가 필요합니다. UAVCAN은 비행중에는 사용되지 않습니다.
# 지원 하드웨어
아래와 같은 하드웨어를 지원합니다:
- ESC/모터 콘트롤러
- 항속 센서
- GPS 및 GLONASS용 GNSS 수신기
- 전원 모니터
- 거리 센서
- 광류
PX4는 UAVCAN 서보를 지원하지 않습니다(작성 시). 선택한 하드웨어는 Pixhawk 2.1, Zubax Orel 20 ESCs, Zubax GNSS GPS 입니다.
# 배선
모든 UAVCAN 구성 요소는 동일한 연결 아키텍처를 공유하거나 동일한 방식으로 배선됩니다. 모든 온보드 UAVCAN 장치를 체인에 연결하고 버스가 끝 노드에서 종료되었는지 확인합니다(노드가 연결/체인된 순서는 중요하지 않음).
다음 다이어그램은 UAVCAN 모터 컨트롤러(ESC) 및 UAVCAN GNSS에 연결된 비행 콘트롤러의 경우 이를 보여줍니다.
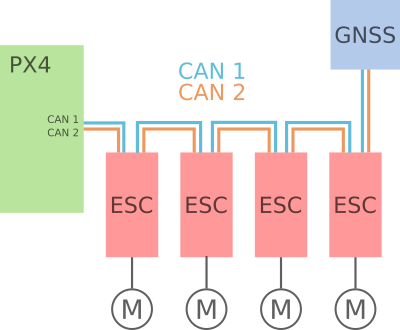
다이어그램에는 전원 배선이 표시되지 않았습니다. 구성 요소에 별도의 전원이 필요 여부와 CAN 버스 자체에서 전원을 공급 여부를 확인하려면 제조업체 지침을 참고하십시오.
적절한 버스 연결에 대한 자세한 내용은 UAVCAN 장치 상호 연결 (opens new window)(Zubax KB)을 참고하십시오.
Note
- 연결은 동일하지만 _커넥터_는 기기마다 다를 수 있습니다.
- 두 번째/이중화" CAN 인터페이스를 위에 표시된 것처럼(CAN2) 사용할 수 있습니다. 이것은 선택 사항이지만, 연결의 견고성을 높일 수 있습니다.
# PX4 설정
PX4에서 UAVCAN 구성 요소를 사용하려면 먼저 UAVCAN 드라이버를 활성화하여야 합니다.
배터리에서 기체에 전원을 공급하고 (비행 콘트롤러뿐만 아니라 전체 기체에 전원을 공급하여야 함) QGroundControl을 연결합니다.
기체 설정 > 매개 변수 화면으로 이동합니다.
UAVCAN_ENABLE은 0이 아닌 값 중 하나로 설정하여야 합니다.
값들은 다음과 같습니다:
0: UAVCAN 드라이버가 비활성화되었습니다.1: 센서 수동 설정.2: 센서 자동 설정.3: 센서 및 액츄에이터(ESC) 자동 설정
연결된 UAVCAN 장치가 자동 구성을 지원하지 없으면
1,2또는3사용 _일부_가 자동 구성을 지원하고, UAVCAN ESC를 사용하는 경우3입니다(이는 PWM이 아닌 UAVCAN 버스에 모터 제어를 할당함).
Note
자동 구성을 지원하지 않는 모든 노드에 대해 수동으로 정적 ID를 할당하여야 합니다. 동적 설정 사용시에는 수동으로 할당된 모든 ID는 충돌을 피하기 위해 UAVCAN 장치의 수보다 큰 값을 지정하여야 합니다.
대부분의 UAVCAN 센서는 추가 설정이 필요하지 않습니다(문서에 특별히 언급되지 않는 한 플러그 앤 플레이 방식임).
UAVCAN 모터 컨트롤러(ESC)는 추가로 모터 순서를 설정하여야 하며, 몇 가지 다른 매개변수를 설정할 수도 있습니다. 간단한 QGroundControl 설정 UI를 사용하여 수행 여부는 ESC 유형에 따라 다릅니다(자세한 내용은 링크 참조).
# 문제 해결
# UAVCAN 장치가 노드 ID를 얻지 못함/펌웨어 업데이트 실패
PX4는 UAVCAN 노드 할당 및 펌웨어 업데이트(부팅 중 발생)를 위한 SD 카드가 필요합니다. SD 카드가 있는 지 확인하고 재부팅하십시오.
# 시동시 모터가 회전하지 않음
PX4 펌웨어 암이 회전하지만 모터가 회전을 시작하지 않는 경우, UAVCAN ESC를 사용하려면 매개 변수 UAVCAN_ENABLE=3을 확인하십시오. 추력이 증가하기 전에 모터가 회전을 시작하지 않으면 UAVCAN_ESC_IDLT=1을 확인하십시오.
# 개발 정보
- UAVCAN 개발: 새로운 UAVCAN 하드웨어의 개발 및 PX4로의 통합과 관련된 주제입니다.